 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Modeling, and Control of a Low-Cost and Rapid Response Soft-Growing Manipulator for Orchard Operations
Nov 01, 2023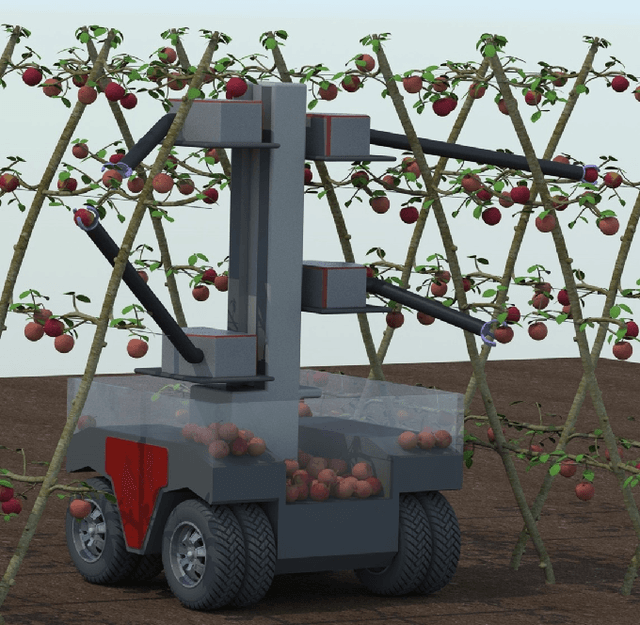
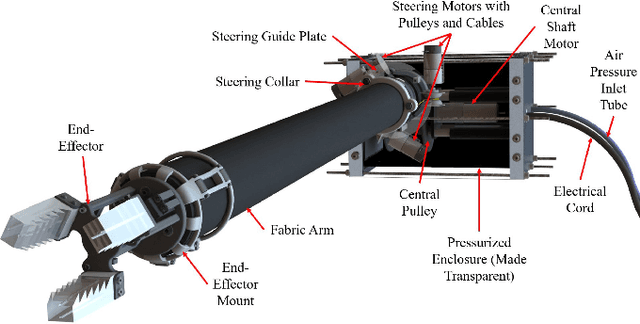
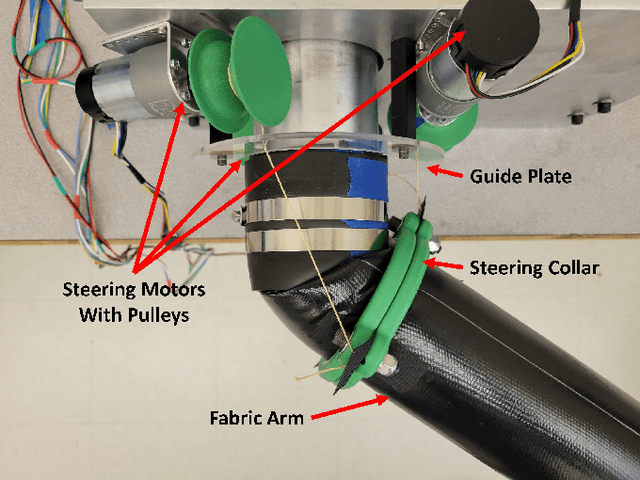
Tree fruit growers around the world are facing labor shortages for critical operations, including harvest and pruning. There is a great interest in developing robotic solutions for these labor-intensive tasks, but current efforts have been prohibitively costly, slow, or require a reconfiguration of the orchard in order to function. In this paper, we introduce an alternative approach to robotics using a novel and low-cost soft-growing robotic platform. Our platform features the ability to extend up to 1.2 m linearly at a maximum speed of 0.27 m/s. The soft-growing robotic arm can operate with a terminal payload of up to 1.4 kg (4.4 N), more than sufficient for carrying an apple. This platform decouples linear and steering motions to simplify path planning and the controller design for targeting. We anticipate our platform being relatively simple to maintain compared to rigid robotic arms. Herein we also describe and experimentally verify the platform's kinematic model, including the prediction of the relationship between the steering angle and the angular positions of the three steering motors. Information from the model enables the position controller to guide the end effector to the targeted positions faster and with higher stability than without this information. Overall, our research show promise for using soft-growing robotic platforms in orchard operations.
Exploring the Potential of Integrated Optical Sensing and Communication (IOSAC) Systems with Si Waveguides for Future Networks
Jun 27, 2023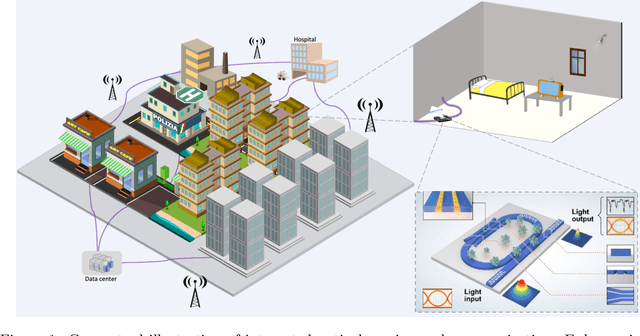
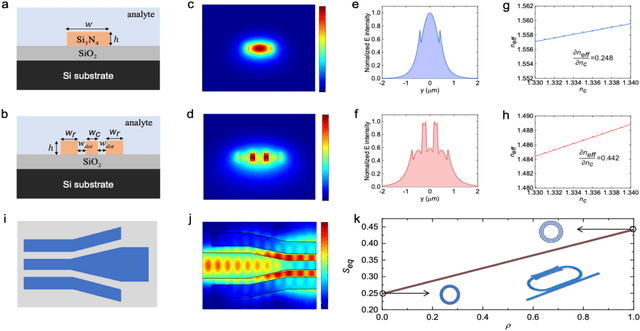
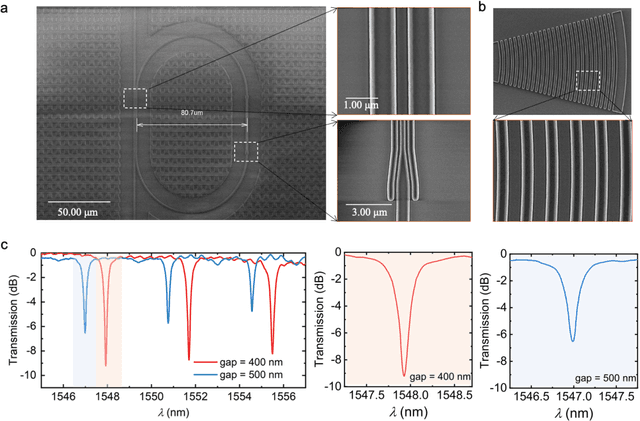
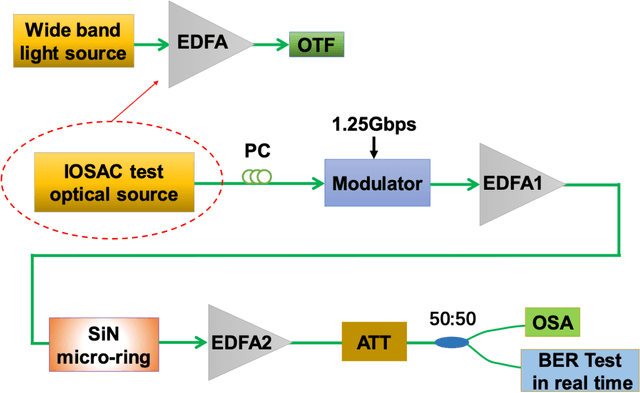
Advanced silicon photonic technologies enable integrated optical sensing and communication (IOSAC) in real time for the emerging application requirements of simultaneous sensing and communication for next-generation networks. Here, we propose and demonstrate the IOSAC system on the silicon nitride (SiN) photonics platform. The IOSAC devices based on microring resonators are capable of monitoring the variation of analytes, transmitting the information to the terminal along with the modulated optical signal in real-time, and replacing bulk optics in high-precision and high-speed applications. By directly integrating SiN ring resonators with optical communication networks, simultaneous sensing and optical communication are demonstrated by an optical signal transmission experimental system using especially filtering amplified spontaneous emission spectra. The refractive index (RI) sensing ring with a sensitivity of 172 nm/RIU, a figure of merit (FOM) of 1220, and a detection limit (DL) of 8.2*10-6 RIU is demonstrated. Simultaneously, the 1.25 Gbps optical on-off-keying (OOK) signal is transmitted at the concentration of different NaCl solutions, which indicates the bit-error-ratio (BER) decreases with the increase in concentration. The novel IOSAC technology shows the potential to realize high-performance simultaneous biosensing and communication in real time and further accelerate the development of IoT and 6G networks.
A Tip Mount for Carrying Payloads using Soft Growing Robots
Dec 17, 2019
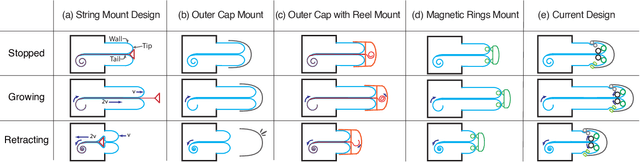
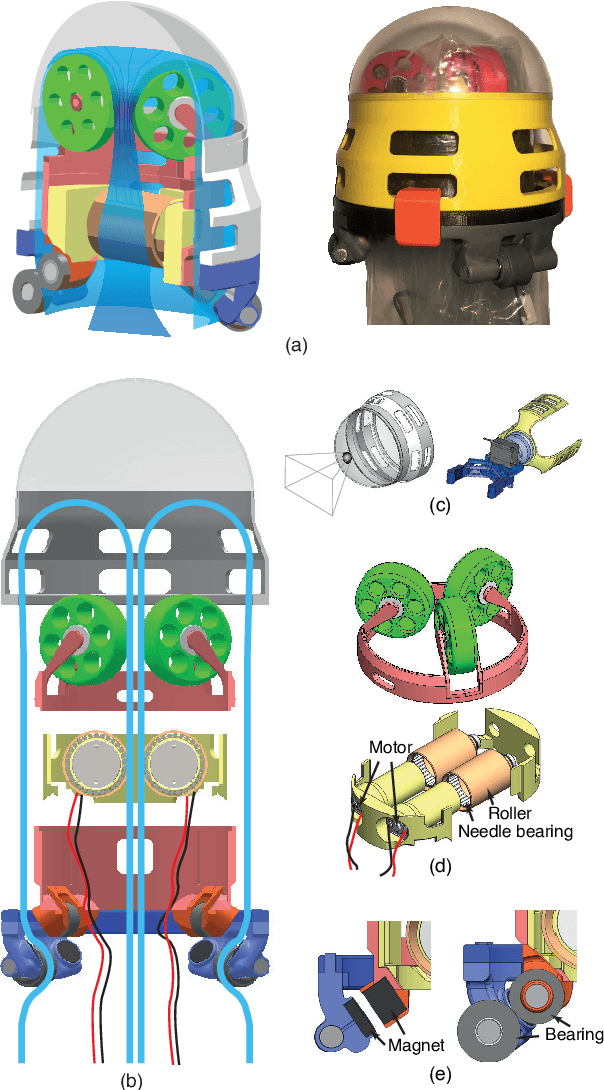
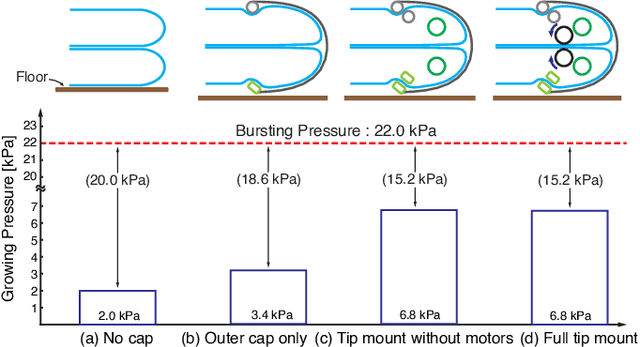
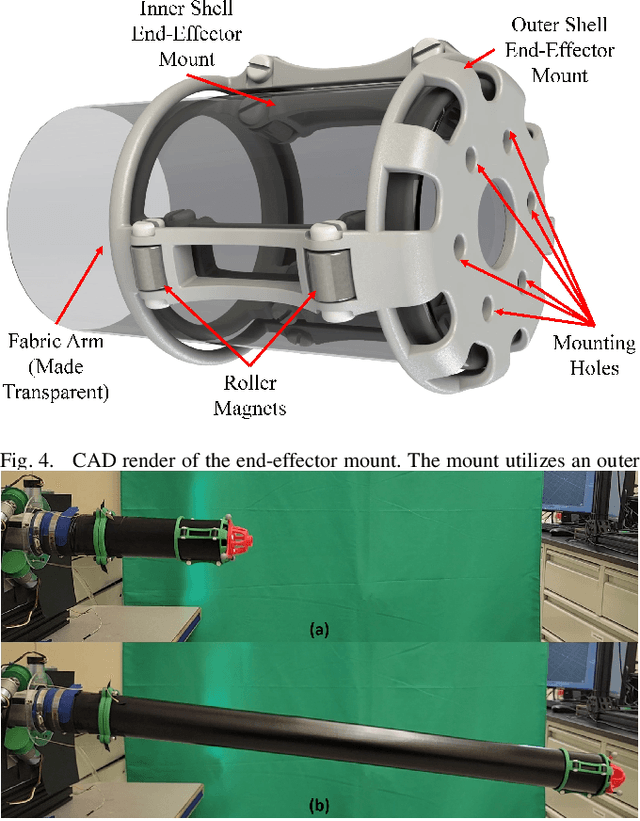
Pneumatically operated soft growing robots that lengthen through tip eversion can be used for inspection and manipulation tasks in confined spaces such as caves, animal habitats, or disaster environments. Because new material is continually emitted from the robot tip, it is challenging to mount sensors, grippers, or other useful payloads at the tip of the robot. Here, we present a tip mount for soft growing robots that can be reliably used and remain attached to the tip during growing, retraction, and steering, while carrying a variety of payloads, including active devices. Our tip mount enables two new soft growing robot capabilities: retracting without buckling while carrying a payload at the tip, and exerting a significant tensile load on the environment during inversion. In this paper, we review previous research on soft growing robot tip mounts, and we discuss the important features of a successful tip mount. We present the design of our tip mount and results for the minimum pressure to grow and the maximum payload in tension. We also demonstrate a soft growing robot equipped with our tip mount retrieving an object and delivering it to a different location.
Human-centered Control of a Growing Soft Robot for Object Manipulation
Oct 28, 2019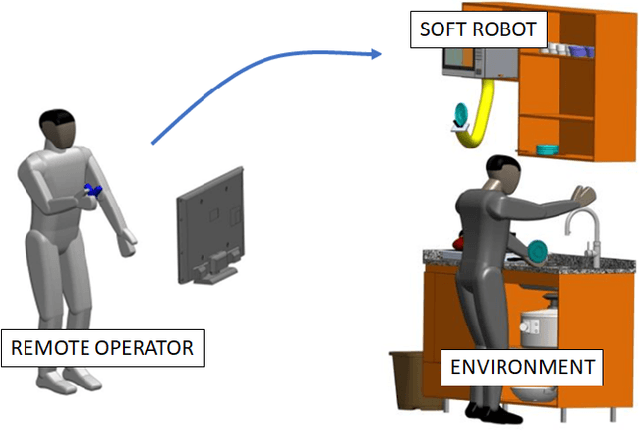

We present a user-friendly interface to teleoperate a soft robot manipulator in a complex environment. Key components of the system include a manipulator with a grasping end-effector that grows via tip eversion, gesture-based control, and haptic display to the operator for feedback and guidance. In the initial work, the operator uses the soft robot to build a tower of blocks, and future works will extend this to shared autonomy scenarios in which the human operator and robot intelligence are both necessary for task completion.
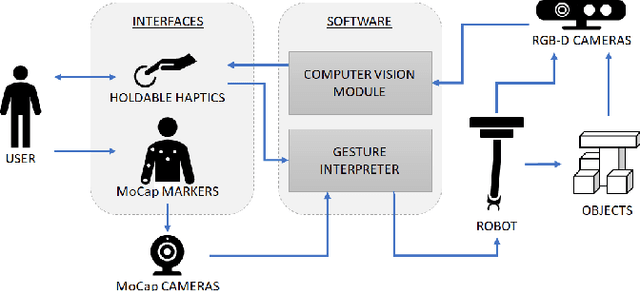
Human Interface for Teleoperated Object Manipulation with a Soft Growing Robot
Oct 28, 2019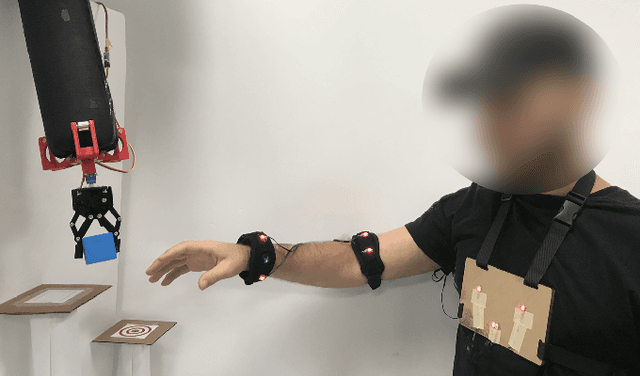
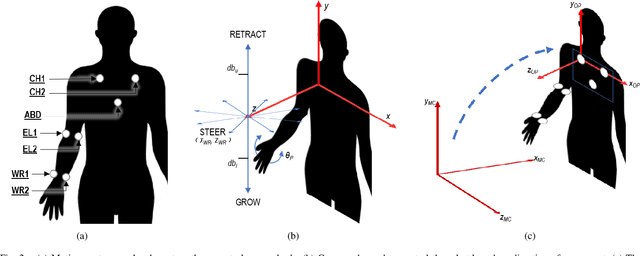
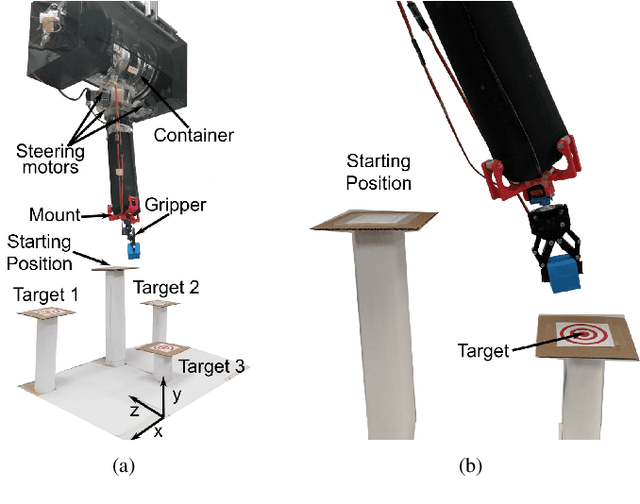
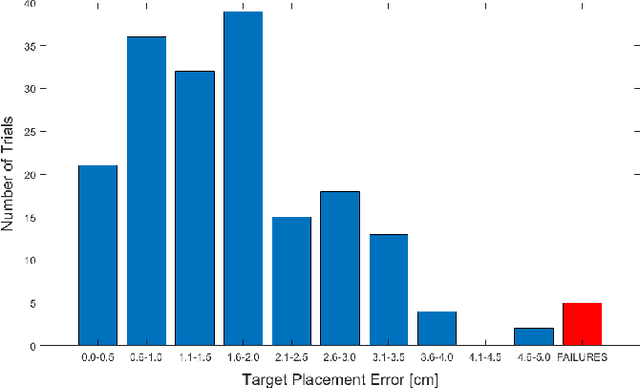
Soft growing robots are proposed for use in applications such as complex manipulation tasks or navigation in disaster scenarios. Safe interaction and ease of production promote the usage of this technology, but soft robots can be challenging to teleoperate due to their unique degrees of freedom. In this paper, we propose a human-centered interface that allows users to teleoperate a soft growing robot for manipulation tasks using arm movements. A study was conducted to assess the intuitiveness of the interface and the performance of our soft robot, involving a pick-and-place manipulation task. The results show that users completed the task with a success rate of 97%, achieving placement errors below 2 cm on average. These results demonstrate that our body-movement-based interface is an effective method for control of a soft growing robot manipulator.