 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Modeling, and Control of a Low-Cost and Rapid Response Soft-Growing Manipulator for Orchard Operations
Nov 01, 2023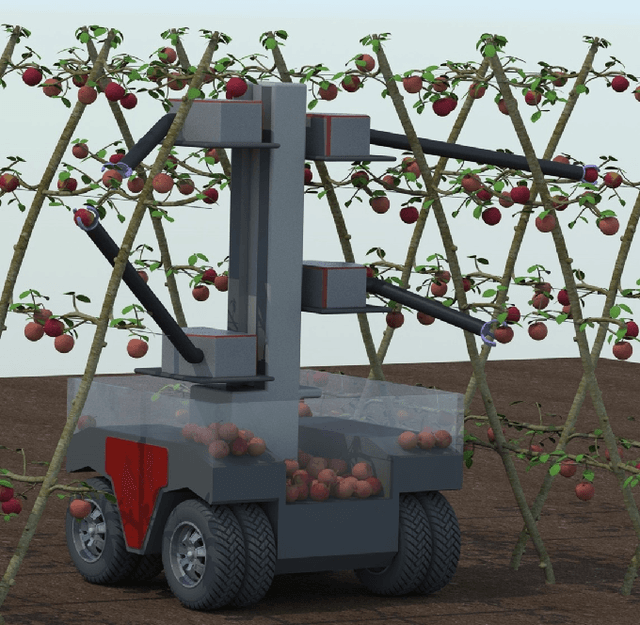
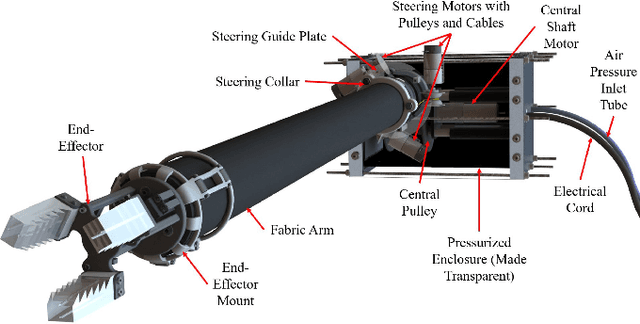
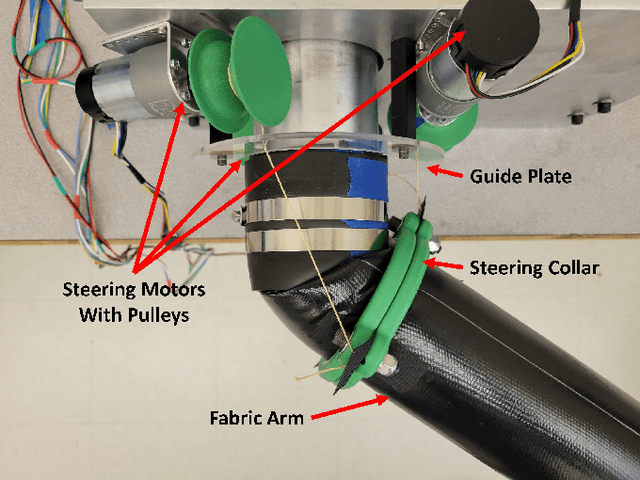
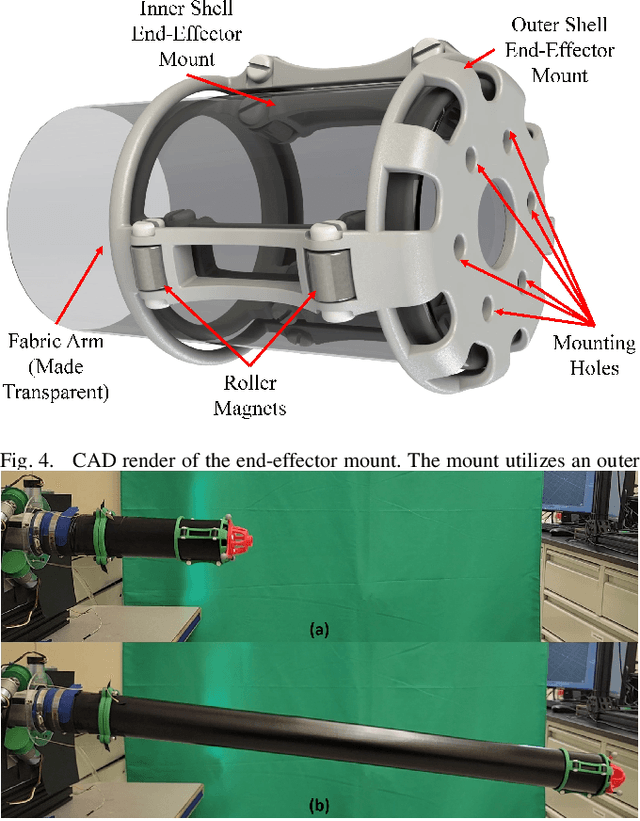
Tree fruit growers around the world are facing labor shortages for critical operations, including harvest and pruning. There is a great interest in developing robotic solutions for these labor-intensive tasks, but current efforts have been prohibitively costly, slow, or require a reconfiguration of the orchard in order to function. In this paper, we introduce an alternative approach to robotics using a novel and low-cost soft-growing robotic platform. Our platform features the ability to extend up to 1.2 m linearly at a maximum speed of 0.27 m/s. The soft-growing robotic arm can operate with a terminal payload of up to 1.4 kg (4.4 N), more than sufficient for carrying an apple. This platform decouples linear and steering motions to simplify path planning and the controller design for targeting. We anticipate our platform being relatively simple to maintain compared to rigid robotic arms. Herein we also describe and experimentally verify the platform's kinematic model, including the prediction of the relationship between the steering angle and the angular positions of the three steering motors. Information from the model enables the position controller to guide the end effector to the targeted positions faster and with higher stability than without this information. Overall, our research show promise for using soft-growing robotic platforms in orchard operations.
Predicting Process Name from Network Data
Sep 03, 2021



The ability to identify applications based on the network data they generate could be a valuable tool for cyber defense. We report on a machine learning technique capable of using netflow-like features to predict the application that generated the traffic. In our experiments, we used ground-truth labels obtained from host-based sensors deployed in a large enterprise environment; we applied random forests and multilayer perceptrons to the tasks of browser vs. non-browser identification, browser fingerprinting, and process name prediction. For each of these tasks, we demonstrate how machine learning models can achieve high classification accuracy using only netflow-like features as the basis for classification.