Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-centered Control of a Growing Soft Robot for Object Manipulation
Oct 28, 2019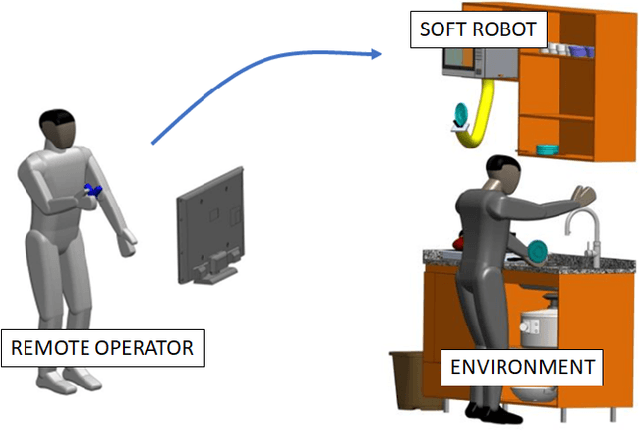
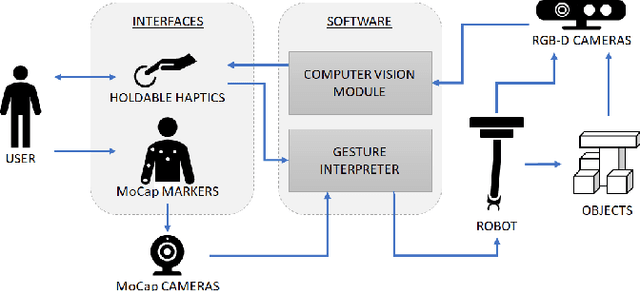

We present a user-friendly interface to teleoperate a soft robot manipulator in a complex environment. Key components of the system include a manipulator with a grasping end-effector that grows via tip eversion, gesture-based control, and haptic display to the operator for feedback and guidance. In the initial work, the operator uses the soft robot to build a tower of blocks, and future works will extend this to shared autonomy scenarios in which the human operator and robot intelligence are both necessary for task completion.
Via