 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of a PPO-Reinforcement Learned Walking Tripedal Soft-Legged Robot using SOFA
Apr 12, 2025



Rigid robots were extensively researched, whereas soft robotics remains an underexplored field. Utilizing soft-legged robots in performing tasks as a replacement for human beings is an important stride to take, especially under harsh and hazardous conditions over rough terrain environments. For the demand to teach any robot how to behave in different scenarios, a real-time physical and visual simulation is essential. When it comes to soft robots specifically, a simulation framework is still an arduous problem that needs to be disclosed. Using the simulation open framework architecture (SOFA) is an advantageous step. However, neither SOFA's manual nor prior public SOFA projects show its maximum capabilities the users can reach. So, we resolved this by establishing customized settings and handling the framework components appropriately. Settling on perfect, fine-tuned SOFA parameters has stimulated our motivation towards implementing the state-of-the-art (SOTA) reinforcement learning (RL) method of proximal policy optimization (PPO). The final representation is a well-defined, ready-to-deploy walking, tripedal, soft-legged robot based on PPO-RL in a SOFA environment. Robot navigation performance is a key metric to be considered for measuring the success resolution. Although in the simulated soft robots case, an 82\% success rate in reaching a single goal is a groundbreaking output, we pushed the boundaries to further steps by evaluating the progress under assigning a sequence of goals. While trailing the platform steps, outperforming discovery has been observed with an accumulative squared error deviation of 19 mm. The full code is publicly available at \href{https://github.com/tarekshohdy/PPO_SOFA_Soft_Legged_Robot.git}{github.com/tarekshohdy/PPO$\textunderscore$SOFA$\textunderscore$Soft$\textunderscore$Legged$\textunderscore$ Robot.git}
Toward Realistic Cinema: The State of the Art in Mechatronics for Modern Animatronic
Nov 04, 2024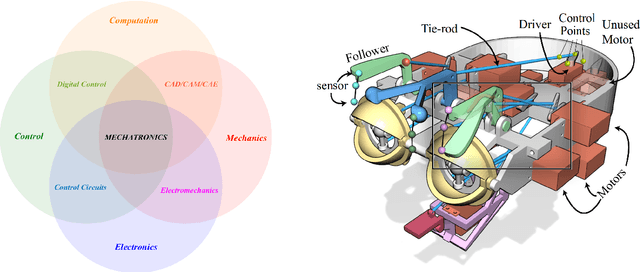


The pursuit of realism in cinema has driven significant advancements in animatronics, where the integration of mechatronics, a multidisciplinary field that combines mechanical engineering, electronics, and computer science, plays a pivotal role in enhancing the functionality and realism of animatronics. This interdisciplinary approach facilitates smoother characters movements and enhances the sophistication of behaviors in animatronic creatures, thereby increasing their realism. This article examines the most recent developments in mechatronic technology and their significant impact on the art and engineering of animatronics in the filmmaking. It explores the sophisticated integration of system components and analyzes how these enhancements foster complexity and integration, crucial for achieving unprecedented levels of realism in modern cinema. Further, the article delves into in-depth case studies of well-known movie characters, demonstrating the practical applicability of these state-of-the-art mechatronic solutions in creating compelling, lifelike cinematic experiences. This paper aims to bridge the gap between the technical aspects of mechatronics and the creative demands of the film industry, ultimately contributing to the ongoing evolution of cinematic realism.
A Soft e-Textile Sensor for Enhanced Deep Learning-based Shape Sensing of Soft Continuum Robots
Apr 19, 2024



The safety and accuracy of robotic navigation hold paramount importance, especially in the realm of soft continuum robotics, where the limitations of traditional rigid sensors become evident. Encoders, piezoresistive, and potentiometer sensors often fail to integrate well with the flexible nature of these robots, adding unwanted bulk and rigidity. To overcome these hurdles, our study presents a new approach to shape sensing in soft continuum robots through the use of soft e-textile resistive sensors. This sensor, designed to flawlessly integrate with the robot's structure, utilizes a resistive material that adjusts its resistance in response to the robot's movements and deformations. This adjustment facilitates the capture of multidimensional force measurements across the soft sensor layers. A deep Convolutional Neural Network (CNN) is employed to decode the sensor signals, enabling precise estimation of the robot's shape configuration based on the detailed data from the e-textile sensor. Our research investigates the efficacy of this e-textile sensor in determining the curvature parameters of soft continuum robots. The findings are encouraging, showing that the soft e-textile sensor not only matches but potentially exceeds the capabilities of traditional rigid sensors in terms of shape sensing and estimation. This advancement significantly boosts the safety and efficiency of robotic navigation systems.
Obstacle-Aware Navigation of Soft Growing Robots via Deep Reinforcement Learning
Jan 23, 2024Soft growing robots, are a type of robots that are designed to move and adapt to their environment in a similar way to how plants grow and move with potential applications where they could be used to navigate through tight spaces, dangerous terrain, and hard-to-reach areas. This research explores the application of deep reinforcement Q-learning algorithm for facilitating the navigation of the soft growing robots in cluttered environments. The proposed algorithm utilizes the flexibility of the soft robot to adapt and incorporate the interaction between the robot and the environment into the decision-making process. Results from simulations show that the proposed algorithm improves the soft robot's ability to navigate effectively and efficiently in confined spaces. This study presents a promising approach to addressing the challenges faced by growing robots in particular and soft robots general in planning obstacle-aware paths in real-world scenarios.
State Estimation of Continuum Robots: A Nonlinear Constrained Moving Horizon Approach
Aug 07, 2023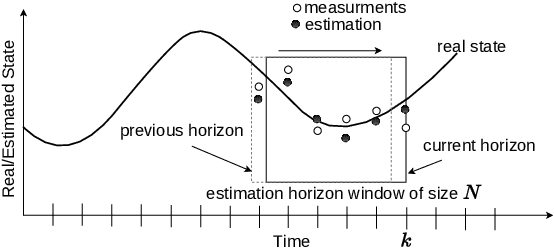
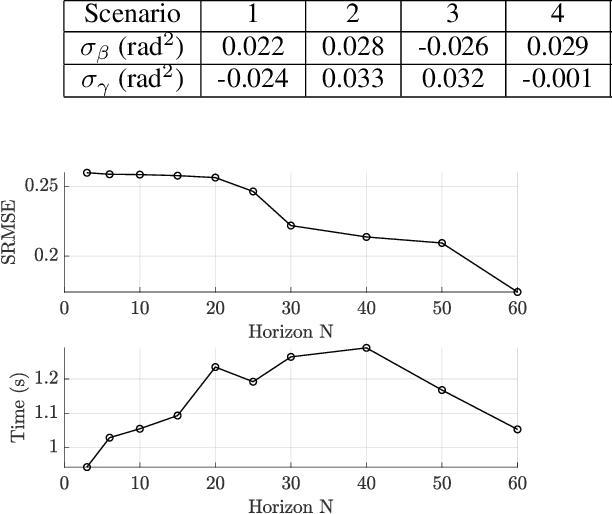
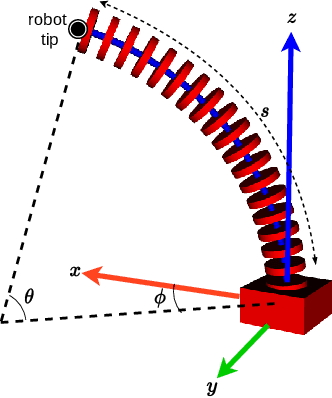
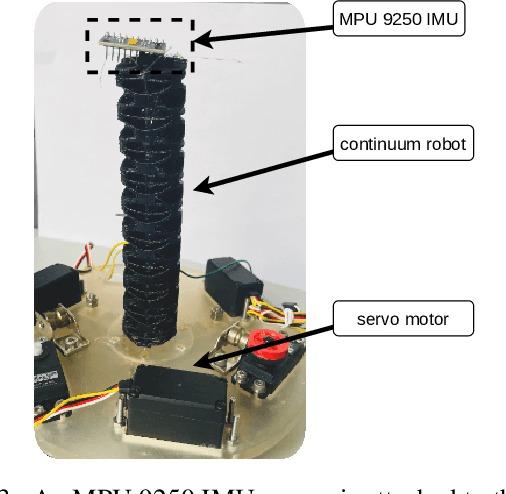
Continuum robots, made from flexible materials with continuous backbones, have several advantages over traditional rigid robots. Some of them are the ability to navigate through narrow or confined spaces, adapt to irregular or changing environments, and perform tasks in proximity to humans. However, one of the challenges in using continuum robots is the difficulty in accurately estimating their state, such as their tip position and curvature. This is due to the complexity of their kinematics and the inherent uncertainty in their measurement and control. This paper proposes a moving horizon estimation (MHE) approach for estimating the robot's state, including its tip position and shape parameters. Our approach involves minimizing the error between measurement samples from an IMU attached to the robot's tip and the estimated state along the estimation horizon using an inline optimization problem. We demonstrate the effectiveness of our approach through simulation and experimental results. Our approach can potentially improve the accuracy and robustness of state estimation and control for continuum robots. It can be applied to various applications such as surgery, manufacturing, and inspection.
Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration
Feb 28, 2019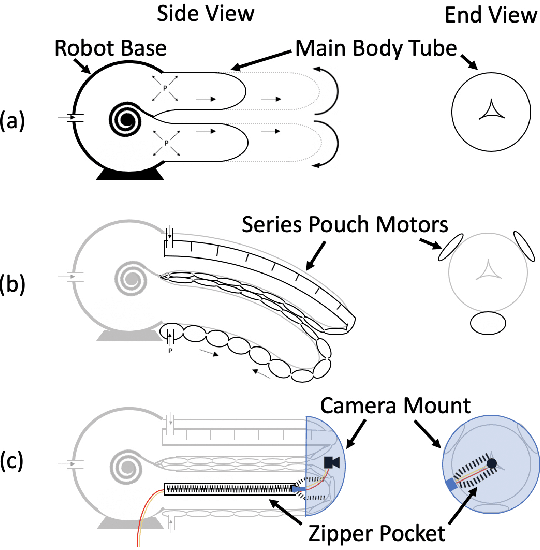
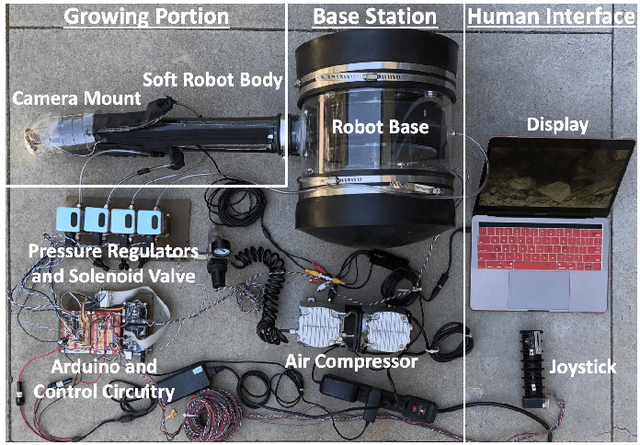
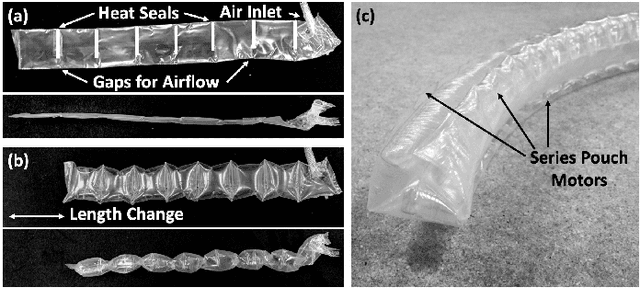
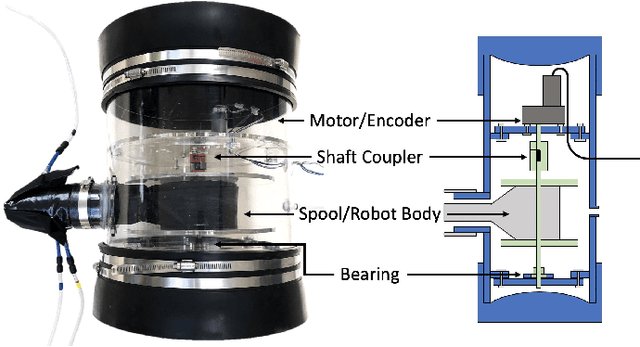
A new class of robots has recently been explored, characterized by tip extension, significant length change, and directional control. Here, we call this class of robots "vine robots," due to their similar behavior to plants with the growth habit of trailing. Due to their growth-based movement, vine robots are well suited for navigation and exploration in cluttered environments, but until now, they have not been deployed outside the lab. Portability of these robots and steerability at length scales relevant for navigation are key to field applications. In addition, intuitive human-in-the-loop teleoperation enables movement in unknown and dynamic environments. We present a vine robot system that is teleoperated using a custom designed flexible joystick and camera system, long enough for use in navigation tasks, and portable for use in the field. We report on deployment of this system in two scenarios: a soft robot navigation competition and exploration of an archaeological site. The competition course required movement over uneven terrain, past unstable obstacles, and through a small aperture. The archaeological site required movement over rocks and through horizontal and vertical turns. The robot tip successfully moved past the obstacles and through the tunnels, demonstrating the capability of vine robots to achieve real-world navigation and exploration tasks.