 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical Heuristic for Clustered Steiner Trees in the Plane with Obstacles
Dec 02, 2024Euclidean Steiner trees are relevant to model minimal networks in real-world applications ubiquitously. In this paper, we study the feasibility of a hierarchical approach embedded with bundling operations to compute multiple and mutually disjoint Euclidean Steiner trees that avoid clutter and overlapping with obstacles in the plane, which is significant to model the decentralized and the multipoint coordination of agents in constrained 2D domains. Our computational experiments using arbitrary obstacle configuration with convex and non-convex geometries show the feasibility and the attractive performance when computing multiple obstacle-avoiding Steiner trees in the plane. Our results offer the mechanisms to elucidate new operators for obstacle-avoiding Steiner trees.
A Hybrid Evolutionary Approach for Multi Robot Coordinated Planning at Intersections
Dec 02, 2024
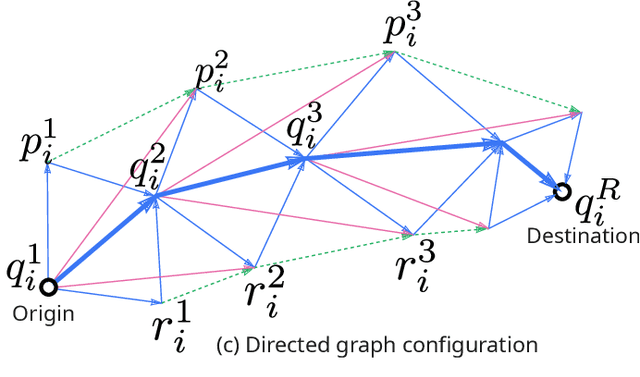


Coordinated multi-robot motion planning at intersections is key for safe mobility in roads, factories and warehouses. The rapidly exploring random tree (RRT) algorithms are popular in multi-robot motion planning. However, generating the graph configuration space and searching in the composite tensor configuration space is computationally expensive for large number of sample points. In this paper, we propose a new evolutionary-based algorithm using a parametric lattice-based configuration and the discrete-based RRT for collision-free multi-robot planning at intersections. Our computational experiments using complex planning intersection scenarios have shown the feasibility and the superiority of the proposed algorithm compared to seven other related approaches. Our results offer new sampling and representation mechanisms to render optimization-based approaches for multi-robot navigation.
DroneVis: Versatile Computer Vision Library for Drones
Jun 01, 2024



This paper introduces DroneVis, a novel library designed to automate computer vision algorithms on Parrot drones. DroneVis offers a versatile set of features and provides a diverse range of computer vision tasks along with a variety of models to choose from. Implemented in Python, the library adheres to high-quality code standards, facilitating effortless customization and feature expansion according to user requirements. In addition, comprehensive documentation is provided, encompassing usage guidelines and illustrative use cases. Our documentation, code, and examples are available in https://github.com/ahmedheakl/drone-vis.
A Soft e-Textile Sensor for Enhanced Deep Learning-based Shape Sensing of Soft Continuum Robots
Apr 19, 2024



The safety and accuracy of robotic navigation hold paramount importance, especially in the realm of soft continuum robotics, where the limitations of traditional rigid sensors become evident. Encoders, piezoresistive, and potentiometer sensors often fail to integrate well with the flexible nature of these robots, adding unwanted bulk and rigidity. To overcome these hurdles, our study presents a new approach to shape sensing in soft continuum robots through the use of soft e-textile resistive sensors. This sensor, designed to flawlessly integrate with the robot's structure, utilizes a resistive material that adjusts its resistance in response to the robot's movements and deformations. This adjustment facilitates the capture of multidimensional force measurements across the soft sensor layers. A deep Convolutional Neural Network (CNN) is employed to decode the sensor signals, enabling precise estimation of the robot's shape configuration based on the detailed data from the e-textile sensor. Our research investigates the efficacy of this e-textile sensor in determining the curvature parameters of soft continuum robots. The findings are encouraging, showing that the soft e-textile sensor not only matches but potentially exceeds the capabilities of traditional rigid sensors in terms of shape sensing and estimation. This advancement significantly boosts the safety and efficiency of robotic navigation systems.
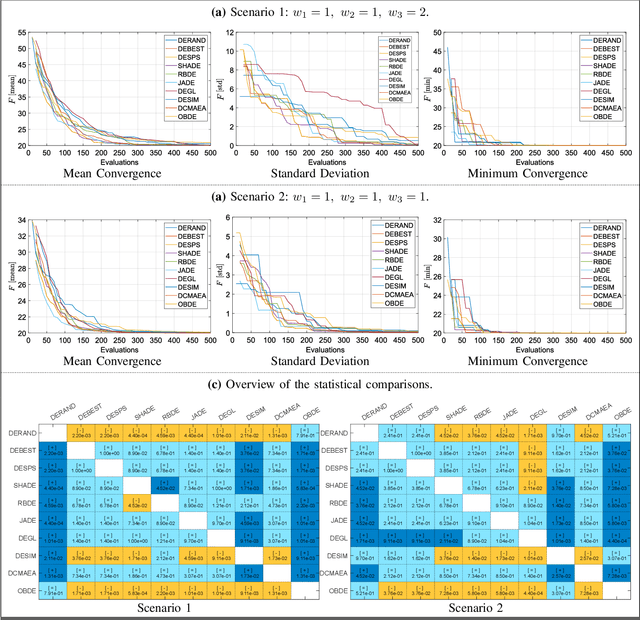
On Searching for Minimal Integer Representation of Undirected Graphs
Dec 13, 2023Minimal and efficient graph representations are key to store, communicate, and sample the search space of graphs and networks while meeting user-defined criteria. In this paper, we investigate the feasibility of gradient-free optimization heuristics based on Differential Evolution to search for minimal integer representations of undirected graphs. The class of Differential Evolution algorithms are population-based gradient-free optimization heuristics having found a relevant attention in the nonconvex and nonlinear optimization communities. Our computational experiments using eight classes of Differential Evolution schemes and graph instances with varying degrees of sparsity have shown the merit of attaining minimal numbers for graph encoding/representation rendered by exploration-oriented strategies within few function evaluations. Our results have the potential to elucidate new number-based encoding and sample-based algorithms for graph representation, network design and optimization.
A Study on the Inductance and Thermal Regression and Optimization for Automatic Layout Design of Power Modules
Dec 13, 2023


Power modules with excellent inductance and temperature metrics are significant to meet the rising sophistication of energy demand in new technologies. In this paper, we use a surrogate-based approach to render optimal layouts of power modules with feasible and attractive inductance-temperature ratios at low computational budget. In particular, we use the class of feedforward networks to estimate the surrogate relationships between power module layout-design variables and inductance-temperature factors rendered from simulations; and Differential Evolution algorithms to optimize and locate feasible layout configurations of power module substrates minimizing inductance and temperature ratios. Our findings suggest the desirable classes of feedforward networks and gradient-free optimization algorithms being able to estimate and optimize power module layouts efficiently and effectively.
Learning Obstacle-Avoiding Lattice Paths using Swarm Heuristics: Exploring the Bijection to Ordered Trees
Sep 12, 2022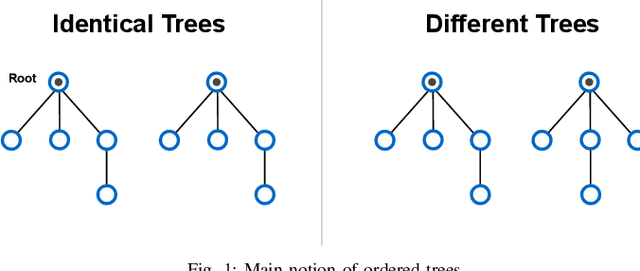
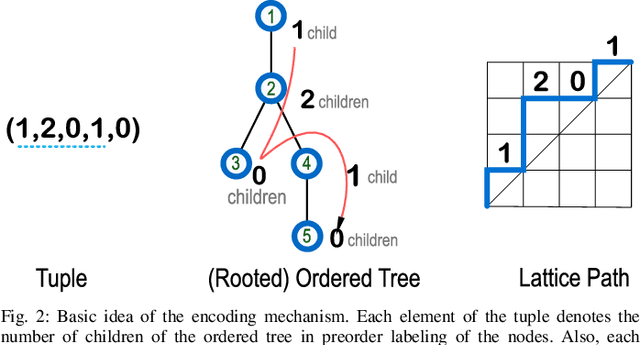
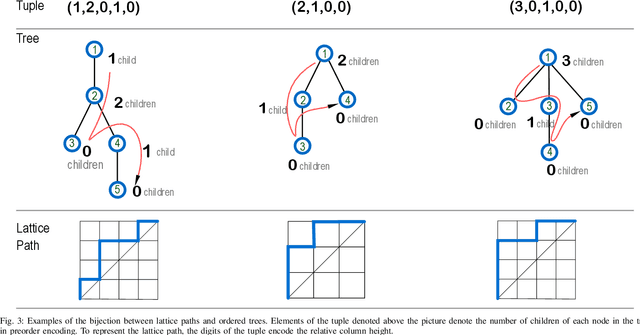
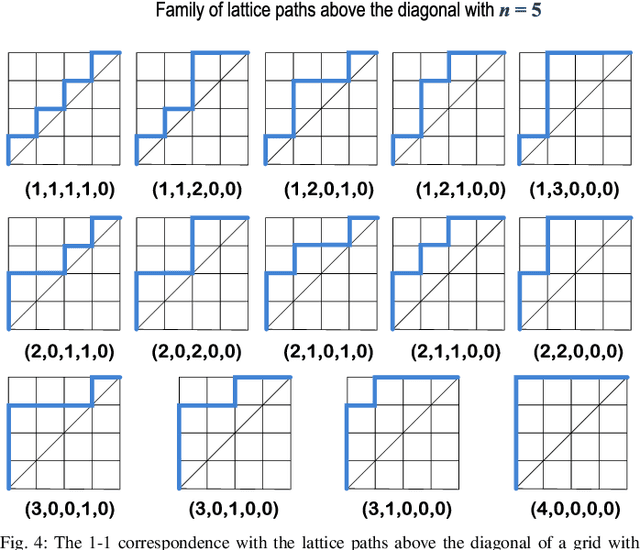
Lattice paths are functional entities that model efficient navigation in discrete/grid maps. This paper presents a new scheme to generate collision-free lattice paths with utmost efficiency using the bijective property to rooted ordered trees, rendering a one-dimensional search problem. Our computational studies using ten state-of-the-art and relevant nature-inspired swarm heuristics in navigation scenarios with obstacles with convex and non-convex geometry show the practical feasibility and efficiency in rendering collision-free lattice paths. We believe our scheme may find use in devising fast algorithms for planning and combinatorial optimization in discrete maps.
A Study on Broadcast Networks for Music Genre Classification
Aug 25, 2022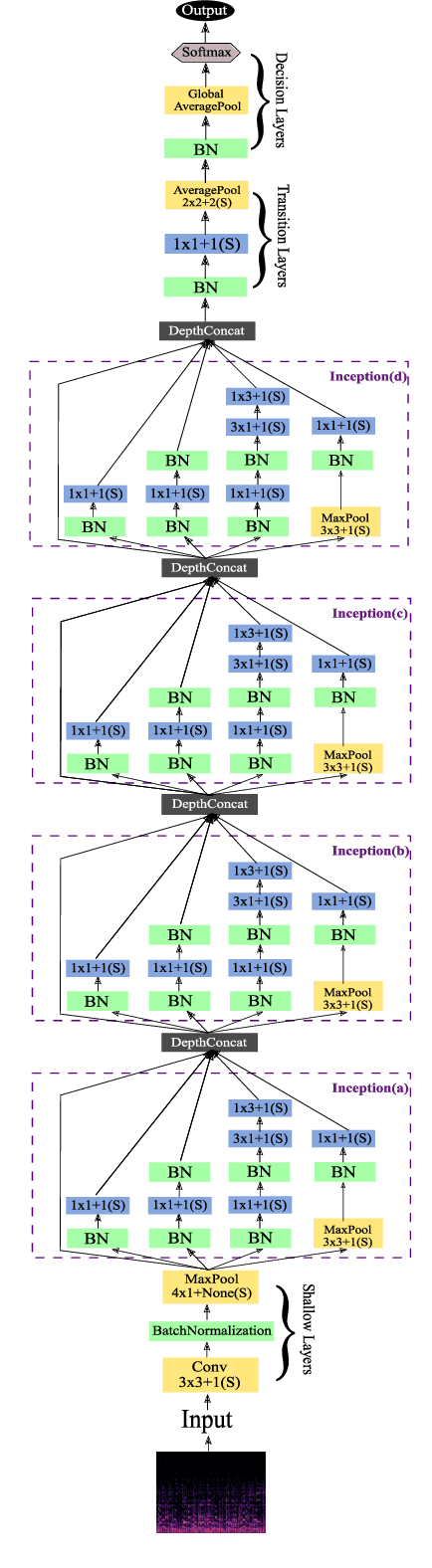
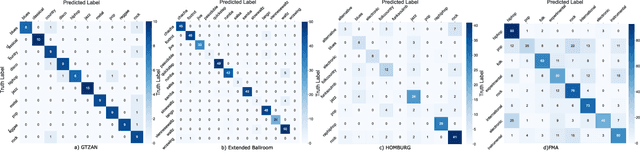
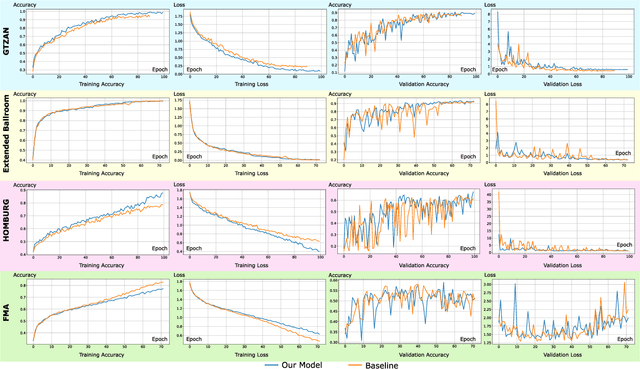
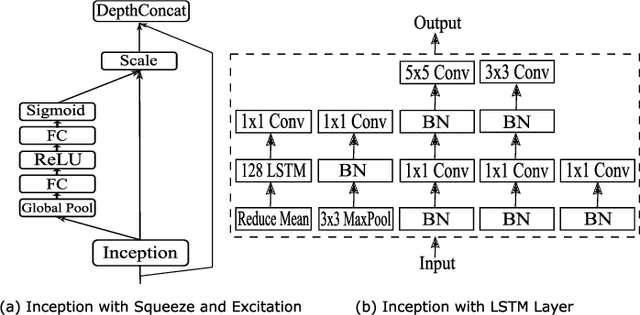
Due to the increased demand for music streaming/recommender services and the recent developments of music information retrieval frameworks, Music Genre Classification (MGC) has attracted the community's attention. However, convolutional-based approaches are known to lack the ability to efficiently encode and localize temporal features. In this paper, we study the broadcast-based neural networks aiming to improve the localization and generalizability under a small set of parameters (about 180k) and investigate twelve variants of broadcast networks discussing the effect of block configuration, pooling method, activation function, normalization mechanism, label smoothing, channel interdependency, LSTM block inclusion, and variants of inception schemes. Our computational experiments using relevant datasets such as GTZAN, Extended Ballroom, HOMBURG, and Free Music Archive (FMA) show state-of-the-art classification accuracies in Music Genre Classification. Our approach offers insights and the potential to enable compact and generalizable broadcast networks for music and audio classification.
Towards Spiral Brick Column Building Robots
Nov 07, 2020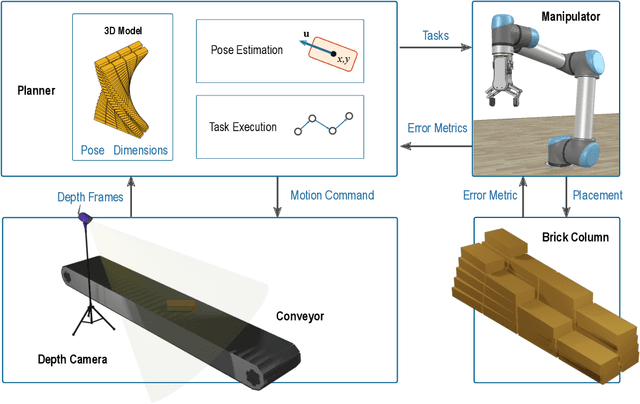


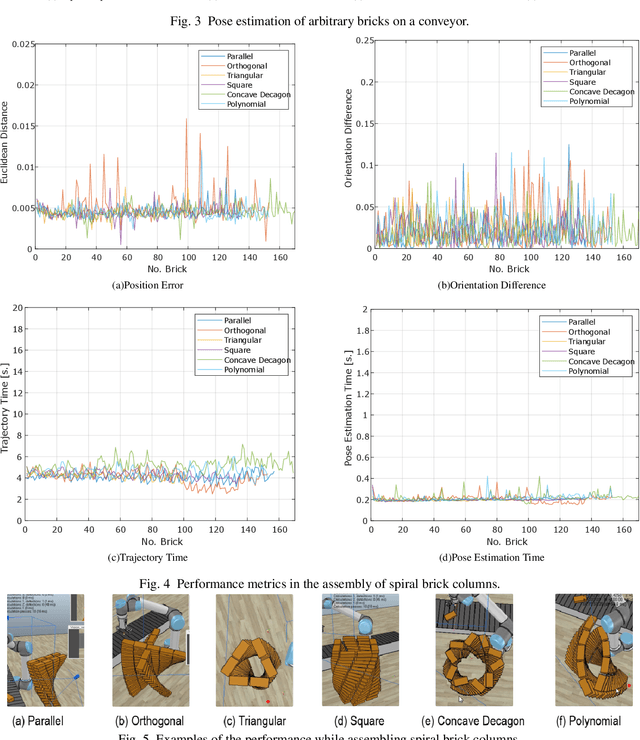
Automation in construction has the potential to expand the technological landscape of labor intensive tasks, and bring gains in efficiency and productivity to sustain global competitiveness. In this paper we propose a task-level approach for assembly of spiral brick columns. Our extensive computational simulations using the generalized models of spiral brick columns show the feasibility, the effectiveness and efficiency of our proposed approach. Our results offer the potential to use robots in automated construction of spiral brick columns with utmost efficiency.