Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Obstacle-Avoiding Lattice Paths using Swarm Heuristics: Exploring the Bijection to Ordered Trees
Paper and Code
Sep 12, 2022
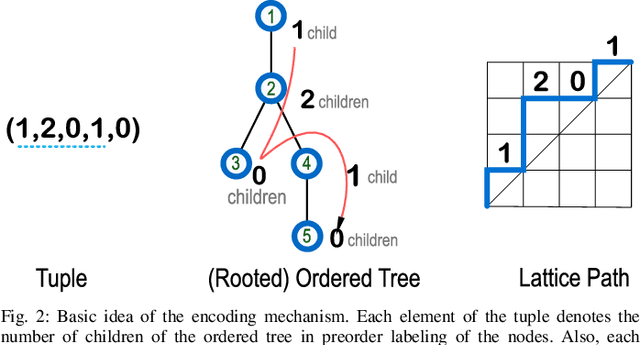
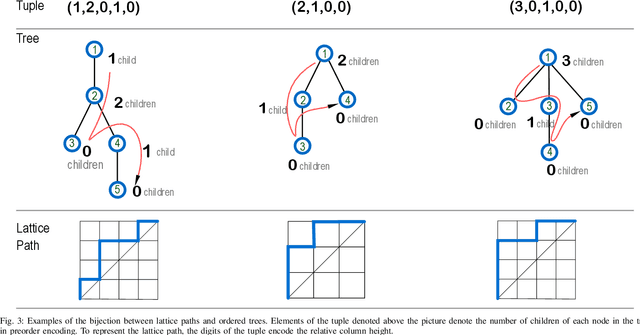
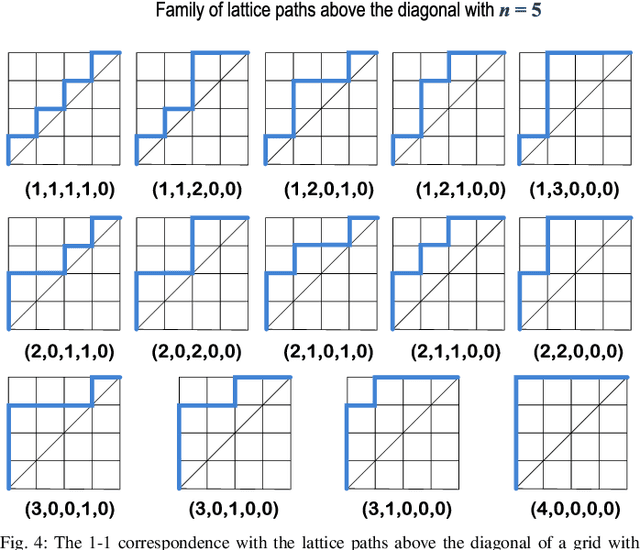
Lattice paths are functional entities that model efficient navigation in discrete/grid maps. This paper presents a new scheme to generate collision-free lattice paths with utmost efficiency using the bijective property to rooted ordered trees, rendering a one-dimensional search problem. Our computational studies using ten state-of-the-art and relevant nature-inspired swarm heuristics in navigation scenarios with obstacles with convex and non-convex geometry show the practical feasibility and efficiency in rendering collision-free lattice paths. We believe our scheme may find use in devising fast algorithms for planning and combinatorial optimization in discrete maps.
* 2022 IEEE Congress on Evolutionary Computation (CEC)
View paper on