Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Spiral Brick Column Building Robots
Nov 07, 2020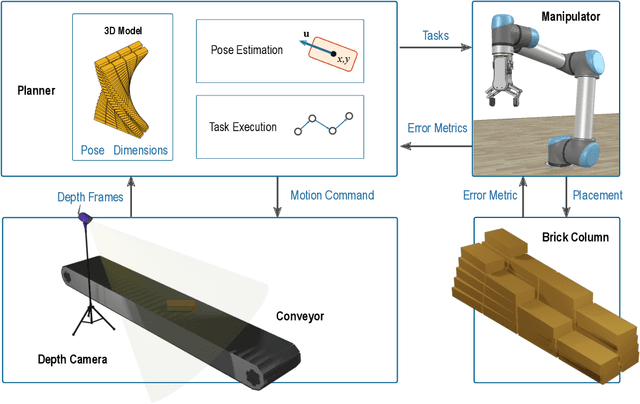


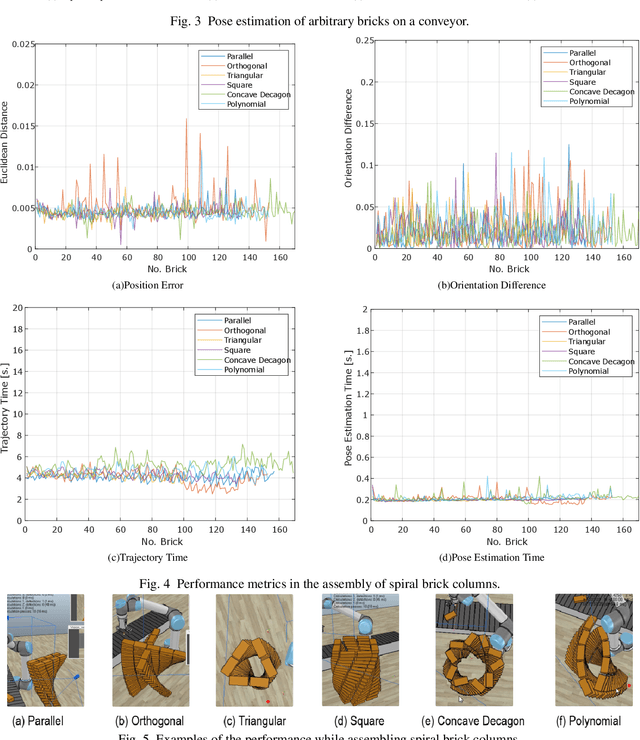
Automation in construction has the potential to expand the technological landscape of labor intensive tasks, and bring gains in efficiency and productivity to sustain global competitiveness. In this paper we propose a task-level approach for assembly of spiral brick columns. Our extensive computational simulations using the generalized models of spiral brick columns show the feasibility, the effectiveness and efficiency of our proposed approach. Our results offer the potential to use robots in automated construction of spiral brick columns with utmost efficiency.
* Proceedings of the SICE Annual Conference 2020, pp. 1448 - 1451
Via