 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Realistic Cinema: The State of the Art in Mechatronics for Modern Animatronic
Nov 04, 2024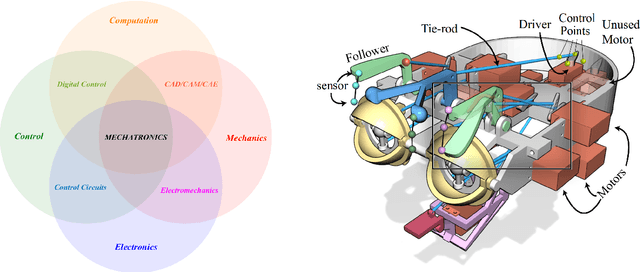


The pursuit of realism in cinema has driven significant advancements in animatronics, where the integration of mechatronics, a multidisciplinary field that combines mechanical engineering, electronics, and computer science, plays a pivotal role in enhancing the functionality and realism of animatronics. This interdisciplinary approach facilitates smoother characters movements and enhances the sophistication of behaviors in animatronic creatures, thereby increasing their realism. This article examines the most recent developments in mechatronic technology and their significant impact on the art and engineering of animatronics in the filmmaking. It explores the sophisticated integration of system components and analyzes how these enhancements foster complexity and integration, crucial for achieving unprecedented levels of realism in modern cinema. Further, the article delves into in-depth case studies of well-known movie characters, demonstrating the practical applicability of these state-of-the-art mechatronic solutions in creating compelling, lifelike cinematic experiences. This paper aims to bridge the gap between the technical aspects of mechatronics and the creative demands of the film industry, ultimately contributing to the ongoing evolution of cinematic realism.
A Soft e-Textile Sensor for Enhanced Deep Learning-based Shape Sensing of Soft Continuum Robots
Apr 19, 2024



The safety and accuracy of robotic navigation hold paramount importance, especially in the realm of soft continuum robotics, where the limitations of traditional rigid sensors become evident. Encoders, piezoresistive, and potentiometer sensors often fail to integrate well with the flexible nature of these robots, adding unwanted bulk and rigidity. To overcome these hurdles, our study presents a new approach to shape sensing in soft continuum robots through the use of soft e-textile resistive sensors. This sensor, designed to flawlessly integrate with the robot's structure, utilizes a resistive material that adjusts its resistance in response to the robot's movements and deformations. This adjustment facilitates the capture of multidimensional force measurements across the soft sensor layers. A deep Convolutional Neural Network (CNN) is employed to decode the sensor signals, enabling precise estimation of the robot's shape configuration based on the detailed data from the e-textile sensor. Our research investigates the efficacy of this e-textile sensor in determining the curvature parameters of soft continuum robots. The findings are encouraging, showing that the soft e-textile sensor not only matches but potentially exceeds the capabilities of traditional rigid sensors in terms of shape sensing and estimation. This advancement significantly boosts the safety and efficiency of robotic navigation systems.