 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling, Reduction, and Control of a Helically Actuated Inertial Soft Robotic Arm via the Koopman Operator
Nov 16, 2020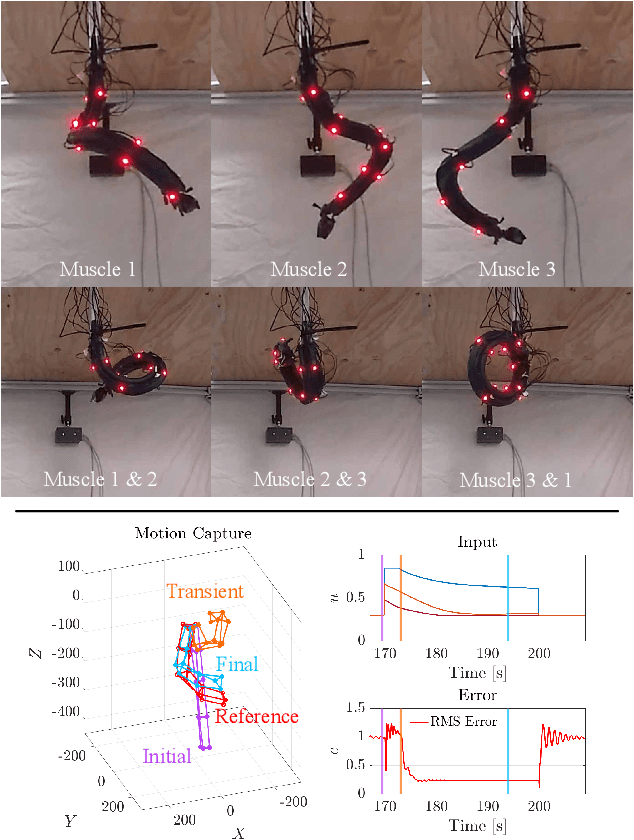
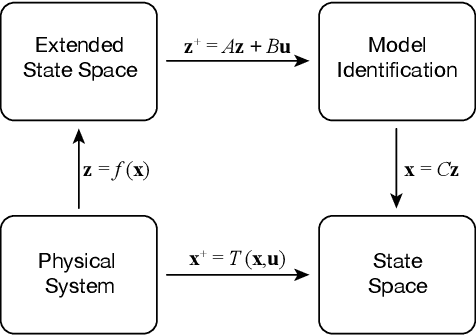
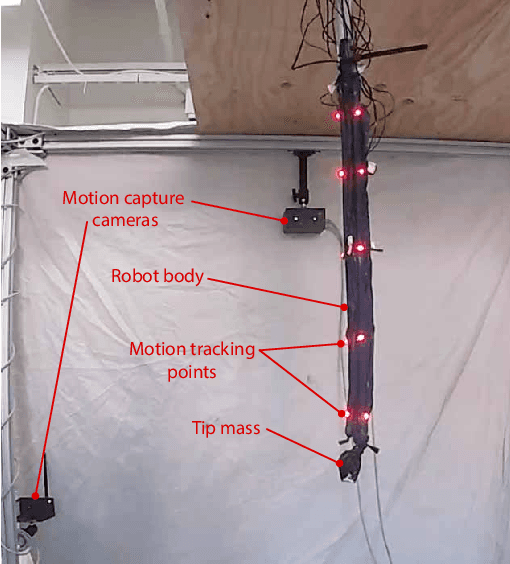
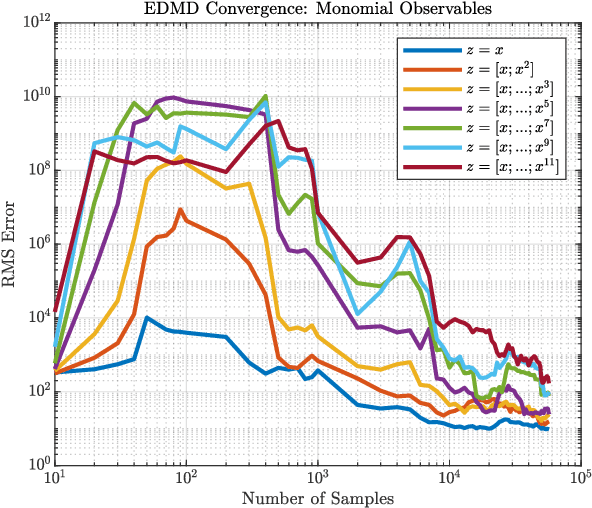
Soft robots promise improved safety and capability over rigid robots when deployed in complex, delicate, and dynamic environments. However, the infinite degrees of freedom and highly nonlinear dynamics of these systems severely complicate their modeling and control. As a step toward addressing this open challenge, we apply the data-driven, Hankel Dynamic Mode Decomposition (HDMD) with time delay observables to the model identification of a highly inertial, helical soft robotic arm with a high number of underactuated degrees of freedom. The resulting model is linear and hence amenable to control via a Linear Quadratic Regulator (LQR). Using our test bed device, a dynamic, lightweight pneumatic fabric arm with an inertial mass at the tip, we show that the combination of HDMD and LQR allows us to command our robot to achieve arbitrary poses using only open loop control. We further show that Koopman spectral analysis gives us a dimensionally reduced basis of modes which decreases computational complexity without sacrificing predictive power.
A Dexterous Tip-extending Robot with Variable-length Shape-locking
Mar 20, 2020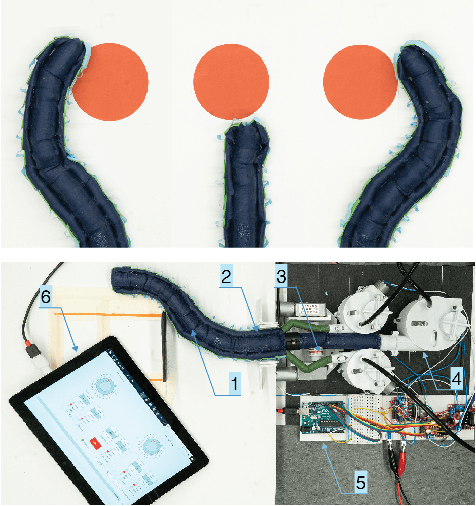
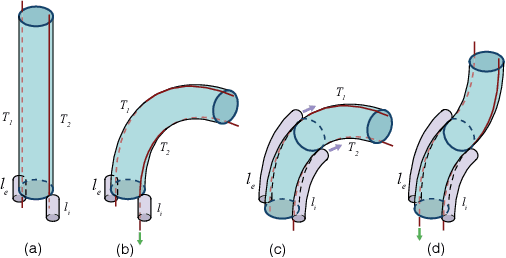
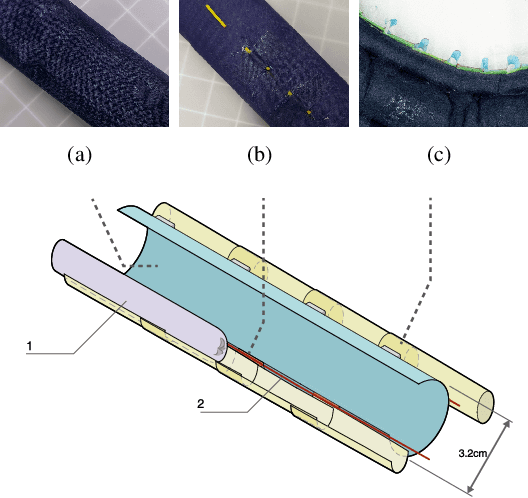
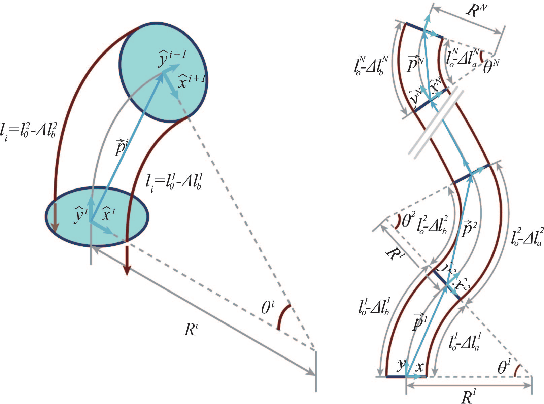
Soft, tip-extending "vine" robots offer a unique mode of inspection and manipulation in highly constrained environments. For practicality, it is desirable that the distal end of the robot can be manipulated freely, while the body remains stationary. However, in previous vine robots, either the shape of the body was fixed after growth with no ability to manipulate the distal end, or the whole body moved together with the tip. Here, we present a concept for shape-locking that enables a vine robot to move only its distal tip, while the body is locked in place. This is achieved using two inextensible, pressurized, tip-extending, chambers that "grow" along the sides of the robot body, preserving curvature in the section where they have been deployed. The length of the locked and free sections can be varied by controlling the extension and retraction of these chambers. We present models describing this shape-locking mechanism and workspace of the robot in both free and constrained environments. We experimentally validate these models, showing an increased dexterous workspace compared to previous vine robots. Our shape-locking concept allows improved performance for vine robots, advancing the field of soft robotics for inspection and manipulation in highly constrained environments.