 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-curvature, high-force, vine robot for inspection
Paper and Code
Oct 02, 2023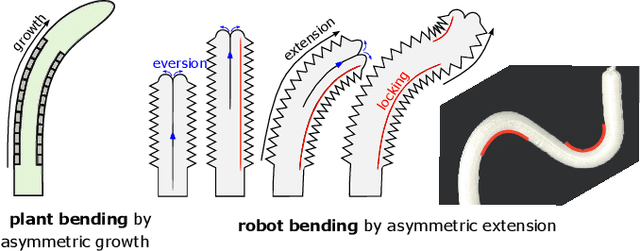
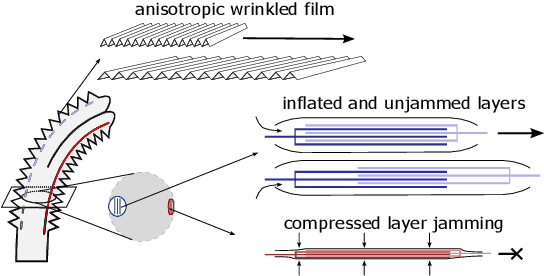
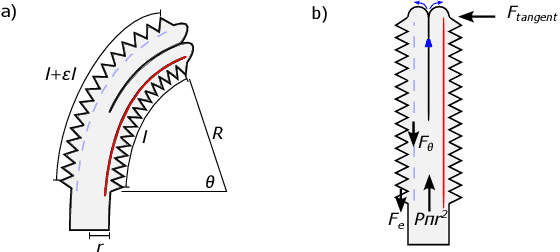
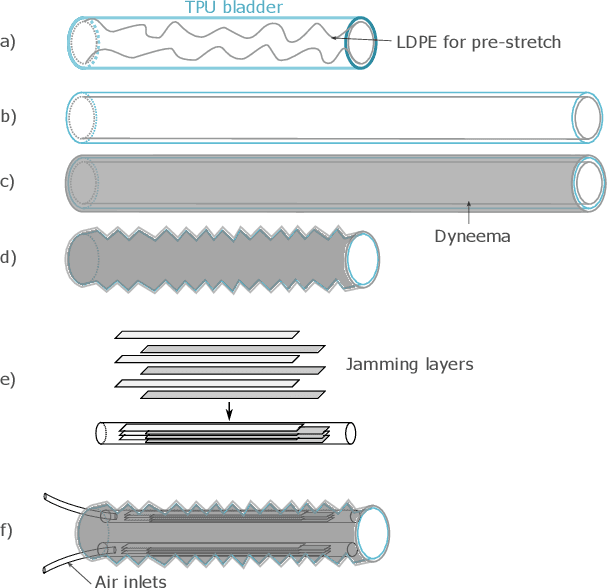
Robot performance has advanced considerably both in and out of the factory, however in tightly constrained, unknown environments such as inside a jet engine or the human heart, current robots are less adept. In such cases where a borescope or endoscope can't reach, disassembly or surgery are costly. One promising inspection device inspired by plant growth are "vine robots" that can navigate cluttered environments by extending from their tip. Yet, these vine robots are currently limited in their ability to simultaneously steer into tight curvatures and apply substantial forces to the environment. Here, we propose a plant-inspired method of steering by asymmetrically lengthening one side of the vine robot to enable high curvature and large force application. Our key development is the introduction of an extremely anisotropic, composite, wrinkled film with elastic moduli 400x different in orthogonal directions. The film is used as the vine robot body, oriented such that it can stretch over 120% axially, but only 3% circumferentially. With the addition of controlled layer jamming, this film enables a steering method inspired by plants in which the circumference of the robot is inextensible, but the sides can stretch to allow turns. This steering method and body pressure do not work against each other, allowing the robot to exhibit higher forces and tighter curvatures than previous vine robot architectures. This work advances the abilities of vine robots--and robots more generally--to not only access tightly constrained environments, but perform useful work once accessed.