 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dynamic Learning Observatory Reveals the Rapid Salinization of Satkhira, Bangladesh
Apr 25, 2026Soil salinity is a major environmental challenge in coastal Bangladesh, threatening agricultural productivity and local livelihoods. This study develops a machine-learning-based framework to predict and map soil salinity in Satkhira district by integrating field observations with Landsat-derived spectral indices. A total of 205 soil samples collected during 2024-2025 were used to train an Extreme Gradient Boosting (XGBoost) model, and predictions were further improved using a Generalized Additive Model (GAM). Spatial cross-validation was applied to reduce autocorrelation bias, and bootstrap resampling was used to quantify prediction uncertainty. The results show strong spatial variability of soil salinity, with higher concentrations in the southern and central coastal regions and lower levels in the northern inland areas. Vegetation indices, particularly NDVI, along with salinity-related spectral indicators, were identified as key predictors. 10-year-window peak-exposure maps generated for 2014-2023 reveal recurrent high-salinity zones and a persistent, expanding footprint of moderate-to-high salinity exposure across the central parts of the district. Uncertainty analysis indicates higher variability in coastal zones and improved prediction stability when multi-year datasets are combined. The proposed framework provides a robust and scalable approach for long-term monitoring of soil salinity. It supports climate-resilient agriculture, land-use planning, and evidence-based decision-making in coastal Bangladesh.
Ensemble-Conditional Gaussian Processes (Ens-CGP): Representation, Geometry, and Inference
Feb 14, 2026We formulate Ensemble-Conditional Gaussian Processes (Ens-CGP), a finite-dimensional synthesis that centers ensemble-based inference on the conditional Gaussian law. Conditional Gaussian processes (CGP) arise directly from Gaussian processes under conditioning and, in linear-Gaussian settings, define the full posterior distribution for a Gaussian prior and linear observations. Classical Kalman filtering is a recursive algorithm that computes this same conditional law under dynamical assumptions; the conditional Gaussian law itself is therefore the underlying representational object, while the filter is one computational realization. In this sense, CGP provides the probabilistic foundation for Kalman-type methods as well as equivalent formulations as a strictly convex quadratic program (MAP estimation), RKHS-regularized regression, and classical regularization. Ens-CGP is the ensemble instantiation of this object, obtained by treating empirical ensemble moments as a (possibly low-rank) Gaussian prior and performing exact conditioning. By separating representation (GP -> CGP -> Ens-CGP) from computation (Kalman filters, EnKF variants, and iterative ensemble schemes), the framework links an earlier-established representational foundation for inference to ensemble-derived priors and clarifies the relationships among probabilistic, variational, and ensemble perspectives.
Learning a Stochastic Differential Equation Model of Tropical Cyclone Intensification from Reanalysis and Observational Data
Jan 13, 2026Tropical cyclones are dangerous natural hazards, but their hazard is challenging to quantify directly from historical datasets due to limited dataset size and quality. Models of cyclone intensification fill this data gap by simulating huge ensembles of synthetic hurricanes based on estimates of the storm's large scale environment. Both physics-based and statistical/ML intensification models have been developed to tackle this problem, but an open question is: can a physically reasonable and simple physics-style differential equation model of intensification be learned from data? In this paper, we answer this question in the affirmative by presenting a 10-term cubic stochastic differential equation model of Tropical Cyclone intensification. The model depends on a well-vetted suite of engineered environmental features known to drive intensification and is trained using a high quality dataset of hurricane intensity (IBTrACS) with estimates of the cyclone's large scale environment from a data-assimilated simulation (ERA5 reanalysis), restricted to the Northern Hemisphere. The model generates synthetic intensity series which capture many aspects of historical intensification statistics and hazard estimates in the Northern Hemisphere. Our results show promise that interpretable, physics style models of complex earth system dynamics can be learned using automated system identification techniques.
LASSE: Learning Active Sampling for Storm Tide Extremes in Non-Stationary Climate Regimes
Jan 06, 2025Identifying tropical cyclones that generate destructive storm tides for risk assessment, such as from large downscaled storm catalogs for climate studies, is often intractable because it entails many expensive Monte Carlo hydrodynamic simulations. Here, we show that surrogate models are promising from accuracy, recall, and precision perspectives, and they "generalize" to novel climate scenarios. We then present an informative online learning approach to rapidly search for extreme storm tide-producing cyclones using only a few hydrodynamic simulations. Starting from a minimal subset of TCs with detailed storm tide hydrodynamic simulations, a surrogate model selects informative data to retrain online and iteratively improves its predictions of damaging TCs. Results on an extensive catalog of downscaled TCs indicate 100% precision in retrieving rare destructive storms using less than 20% of the simulations as training. The informative sampling approach is efficient, scalable to large storm catalogs, and generalizable to climate scenarios.
Multirotor Ensemble Model Predictive Control I: Simulation Experiments
May 22, 2023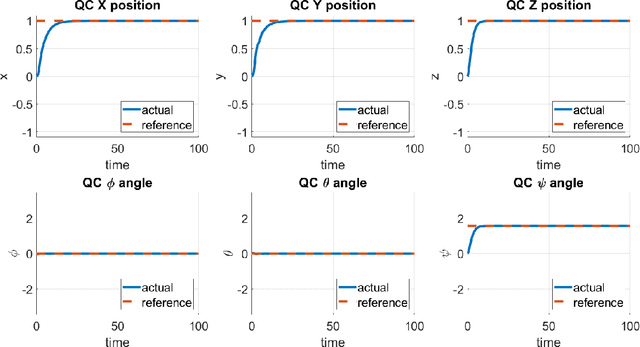



Nonlinear receding horizon model predictive control is a powerful approach to controlling nonlinear dynamical systems. However, typical approaches that use the Jacobian, adjoint, and forward-backward passes may lose fidelity and efficacy for highly nonlinear problems. Here, we develop an Ensemble Model Predictive Control (EMPC) approach wherein the forward model remains fully nonlinear, and an ensemble-represented Gaussian process performs the backward calculations to determine optimal gains for the initial time. EMPC admits black box, possible non-differentiable models, simulations are executable in parallel over long horizons, and control is uncertainty quantifying and applicable to stochastic settings. We construct the EMPC for terminal control and regulation problems and apply it to the control of a quadrotor in a simulated, identical-twin study. Results suggest that the easily implemented approach is promising and amenable to controlling autonomous robotic systems with added state/parameter estimation and parallel computing.
A Stochastic Compound Failure Model for Testing Resilience of Autonomous Fixed-Wing Aircraft I: Formulation and Simulation
May 14, 2023This paper presents a simulation process to dynamically emulate the effects of certain adversarial flight conditions on fixed-wing, autonomous aircraft system actuators. We implement a PX4 Autopilot flight stack module that replaces the generated attitude control inputs with perturbed inputs to the plane's actuator mixer. The perturbed inputs rely on a Markov chain to model failure states that emulate adversarial (failing) actuator flight conditions. Simulated flight failures on a fixed-wing autonomous aircraft test the controller response to a stochastic failure sequence on a range of turning radii. Statistical measures between of the differences between unaffected and perturbed flight paths provides analyses, indicating that a well-tuned PID controller remains competitive in the cascading, compound, transient failure regime.
Learning Inter-Annual Flood Loss Risk Models From Historical Flood Insurance Claims and Extreme Rainfall Data
Dec 15, 2022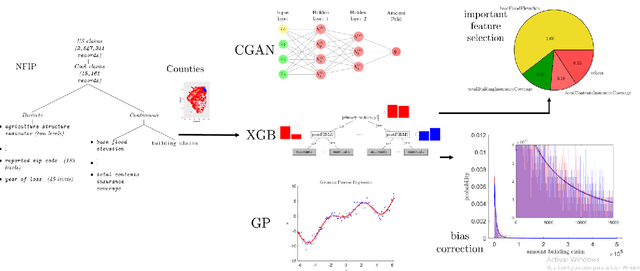
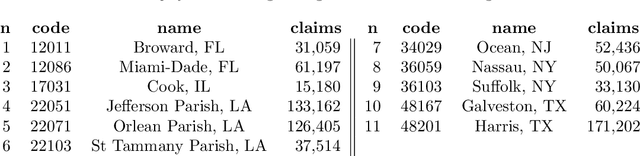
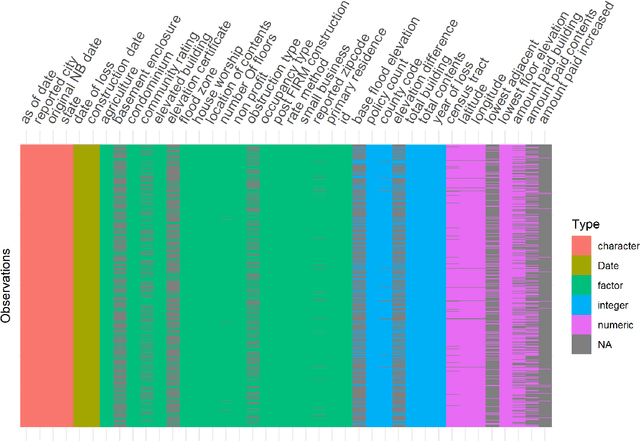
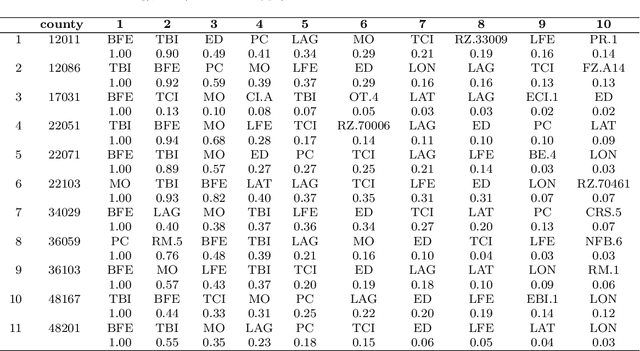
Flooding is one of the most disastrous natural hazards, responsible for substantial economic losses. A predictive model for flood-induced financial damages is useful for many applications such as climate change adaptation planning and insurance underwriting. This research assesses the predictive capability of regressors constructed on the National Flood Insurance Program (NFIP) dataset using neural networks (Conditional Generative Adversarial Networks), decision trees (Extreme Gradient Boosting), and kernel-based regressors (Gaussian Process). The assessment highlights the most informative predictors for regression. The distribution for claims amount inference is modeled with a Burr distribution permitting the introduction of a bias correction scheme and increasing the regressor's predictive capability. Aiming to study the interaction with physical variables, we incorporate Daymet rainfall estimation to NFIP as an additional predictor. A study on the coastal counties in the eight US South-West states resulted in an $R^2=0.807$. Further analysis of 11 counties with a significant number of claims in the NFIP dataset reveals that Extreme Gradient Boosting provides the best results, that bias correction significantly improves the similarity with the reference distribution, and that the rainfall predictor strengthens the regressor performance.
Downscaling Extreme Rainfall Using Physical-Statistical Generative Adversarial Learning
Dec 02, 2022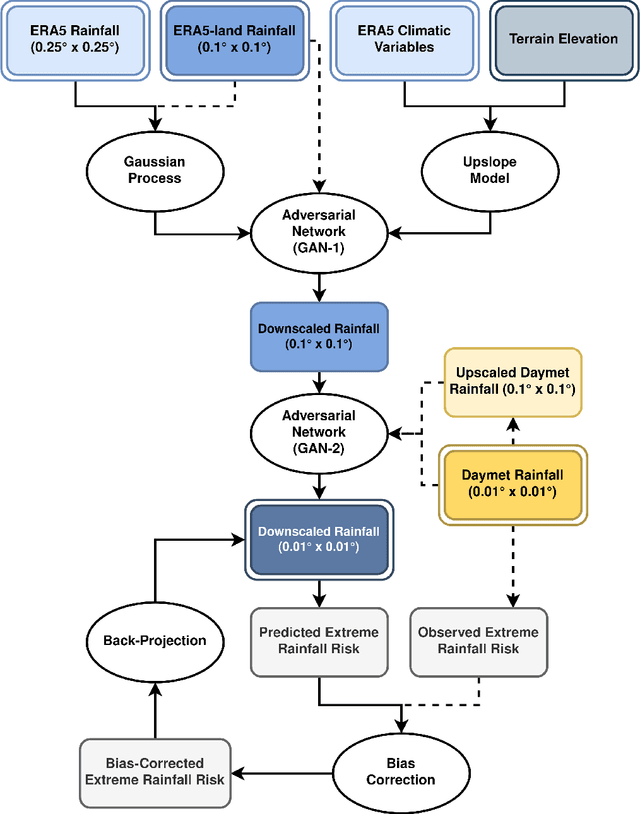
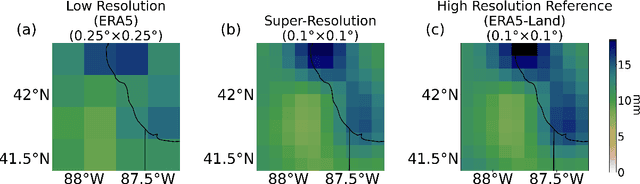
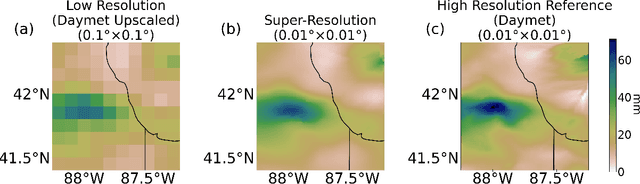
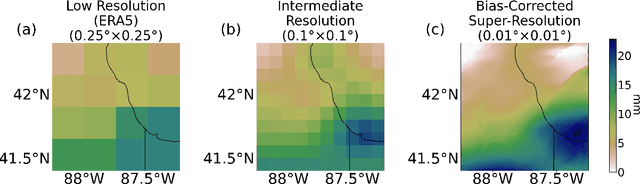
Modeling the risk of extreme weather events in a changing climate is essential for developing effective adaptation and mitigation strategies. Although the available low-resolution climate models capture different scenarios, accurate risk assessment for mitigation and adaption often demands detail that they typically cannot resolve. Here, we develop a dynamic data-driven downscaling (super-resolution) method that incorporates physics and statistics in a generative framework to learn the fine-scale spatial details of rainfall. Our method transforms coarse-resolution ($0.25^{\circ} \times 0.25^{\circ}$) climate model outputs into high-resolution ($0.01^{\circ} \times 0.01^{\circ}$) rainfall fields while efficaciously quantifying uncertainty. Results indicate that the downscaled rainfall fields closely match observed spatial fields and their risk distributions.
An Adaptive Digital Autopilot for Fixed-Wing Aircraft with Actuator Faults
Oct 21, 2021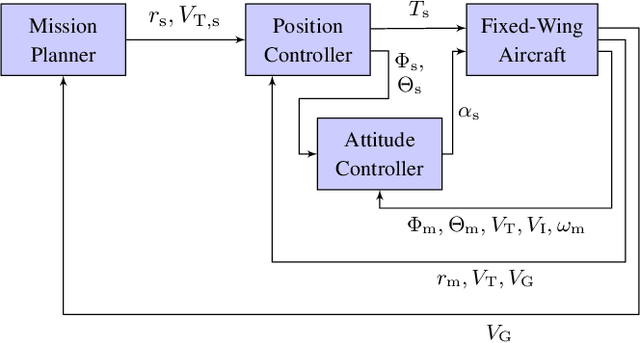
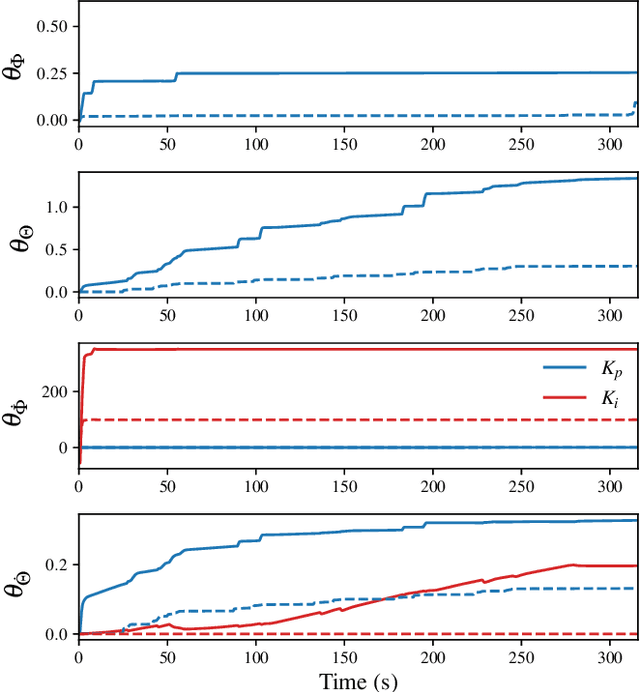
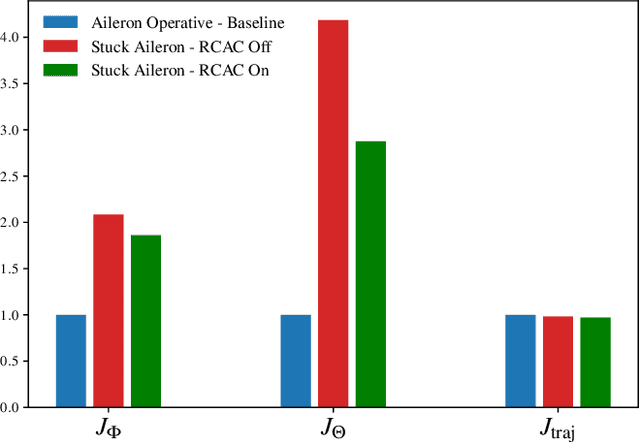
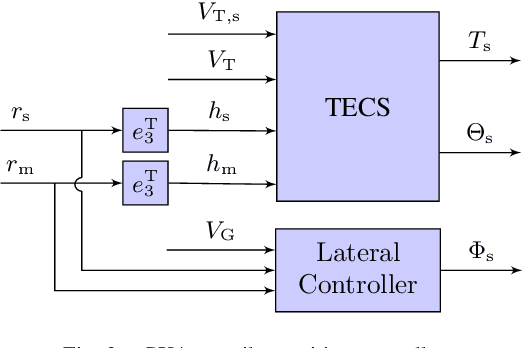
This paper develops an adaptive digital autopilot for a fixed-wing aircraft and compares its performance with a fixed-gain autopilot. The adaptive digital autopilot is constructed by augmenting the autopilot architecture implemented in PX4 flight stack with adaptive digital control laws that are updated using the retrospective cost adaptive control algorithm. In order to investigate the performance of the adaptive digital autopilot, the default gains of the fixed-gain autopilot are scaled down to degrade its performance. This scenario provides a venue for determining the ability of the adaptive digital autopilot to compensate for the detuned fixed-gain autopilot. Next, the performance of the adaptive autopilot is examined under failure conditions by simulating a scenario where one of the control surfaces is assumed to be stuck at an unknown angular position. The adaptive digital autopilot is tested in simulation, and the resulting performance improvements are examined.
Learn Like The Pro: Norms from Theory to Size Neural Computation
Jun 21, 2021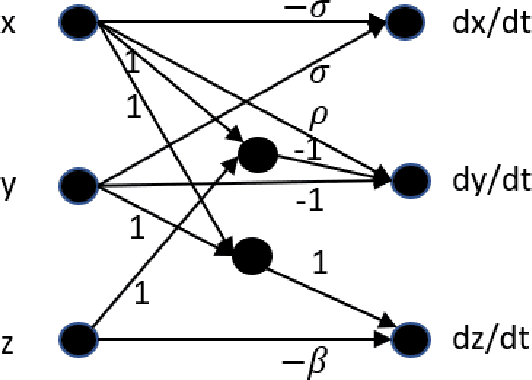
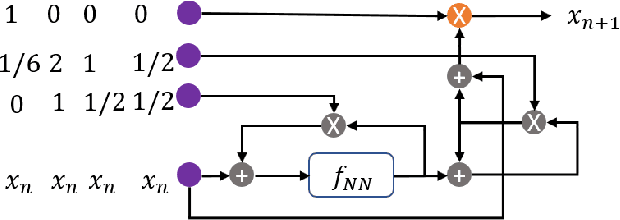
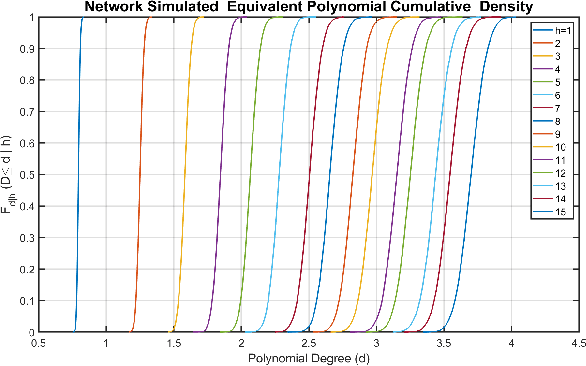
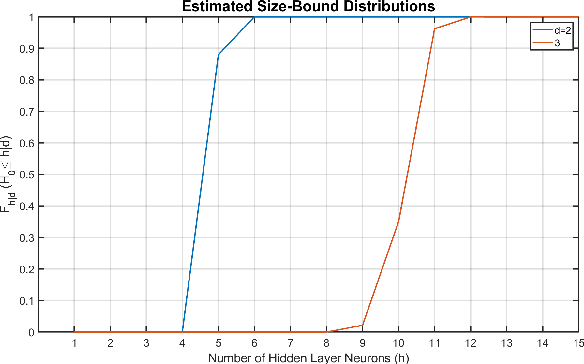
The optimal design of neural networks is a critical problem in many applications. Here, we investigate how dynamical systems with polynomial nonlinearities can inform the design of neural systems that seek to emulate them. We propose a Learnability metric and its associated features to quantify the near-equilibrium behavior of learning dynamics. Equating the Learnability of neural systems with equivalent parameter estimation metric of the reference system establishes bounds on network structure. In this way, norms from theory provide a good first guess for neural structure, which may then further adapt with data. The proposed approach neither requires training nor training data. It reveals exact sizing for a class of neural networks with multiplicative nodes that mimic continuous- or discrete-time polynomial dynamics. It also provides relatively tight lower size bounds for classical feed-forward networks that is consistent with simulated assessments.