 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Parameter Estimators and Calibration Metrics for Pose Estimation from Image Features
Jul 23, 2024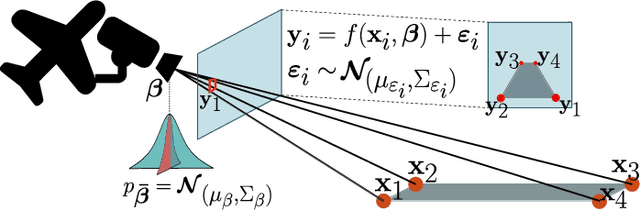
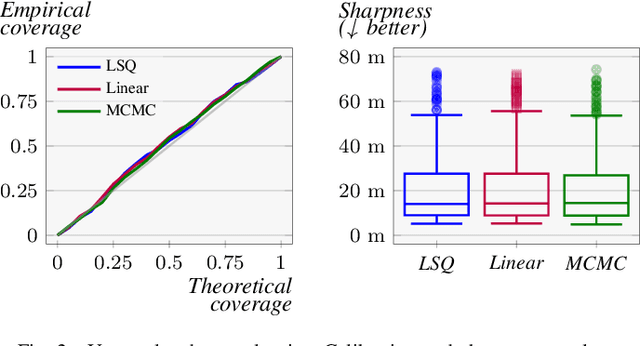
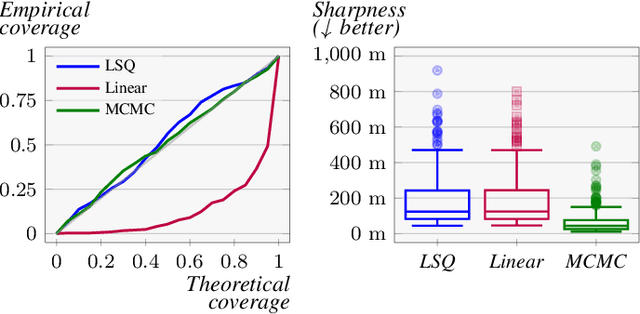
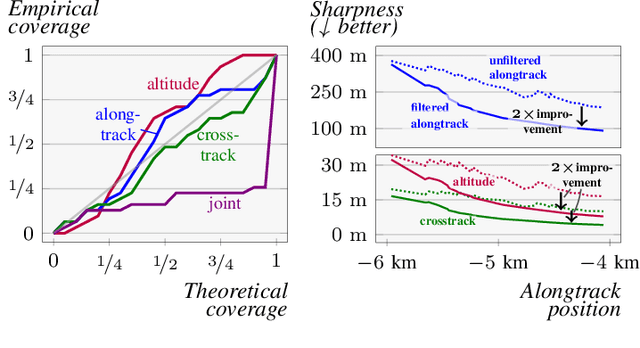
This paper addresses the challenge of probabilistic parameter estimation given measurement uncertainty in real-time. We provide a general formulation and apply this to pose estimation for an autonomous visual landing system. We present three probabilistic parameter estimators: a least-squares sampling approach, a linear approximation method, and a probabilistic programming estimator. To evaluate these estimators, we introduce novel closed-form expressions for measuring calibration and sharpness specifically for multivariate normal distributions. Our experimental study compares the three estimators under various noise conditions. We demonstrate that the linear approximation estimator can produce sharp and well-calibrated pose predictions significantly faster than the other methods but may yield overconfident predictions in certain scenarios. Additionally, we demonstrate that these estimators can be integrated with a Kalman filter for continuous pose estimation during a runway approach where we observe a 50\% improvement in sharpness while maintaining marginal calibration. This work contributes to the integration of data-driven computer vision models into complex safety-critical aircraft systems and provides a foundation for developing rigorous certification guidelines for such systems.
Experimental Flight Testing of an Adaptive Autopilot with Parameter Drift Mitigation
Apr 20, 2023



This paper modifies an adaptive multicopter autopilot to mitigate instabilities caused by adaptive parameter drift and presents simulation and experimental results to validate the modified autopilot. The modified adaptive controller is obtained by including a static nonlinearity in the adaptive loop, updated by the retrospective cost adaptive control algorithm. It is shown in simulation and physical test experiments that the adaptive autopilot with proposed modifications can continually improve the fixed-gain autopilot as well as prevent the drift of the adaptive parameters, thus improving the robustness of the adaptive autopilot.
Experimental Flight Testing of a Fault-Tolerant Adaptive Autopilot for Fixed-Wing Aircraft
Oct 24, 2022
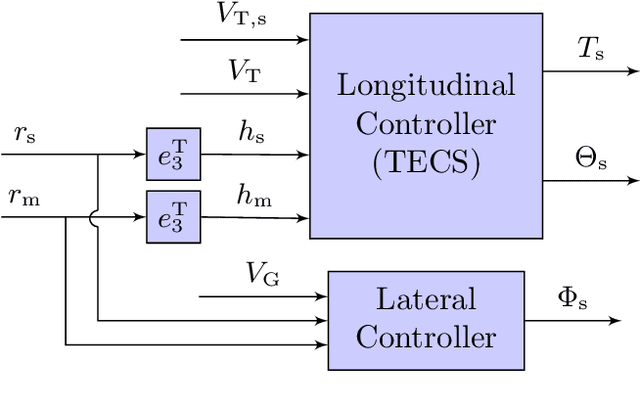


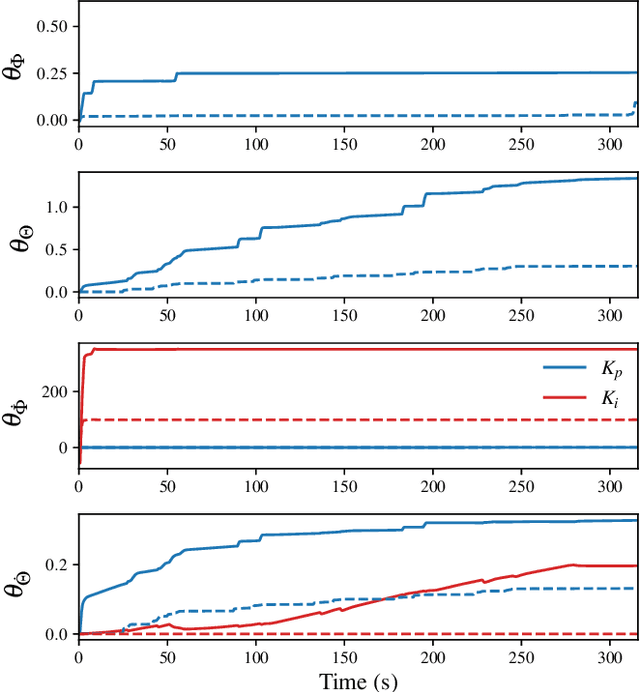
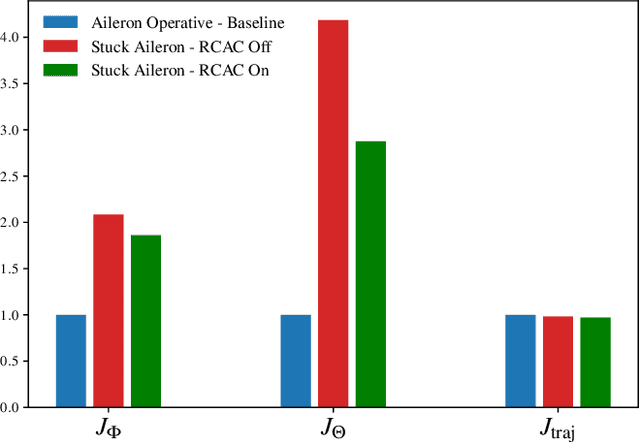
This paper presents an adaptive autopilot for fixed-wing aircraft and compares its performance with a fixed-gain autopilot. The adaptive autopilot is constructed by augmenting the autopilot architecture with adaptive control laws that are updated using retrospective cost adaptive control. In order to investigate the performance of the adaptive autopilot, the default gains of the fixed-gain autopilot are scaled to degrade its performance. This scenario provides a venue for determining the ability of the adaptive autopilot to compensate for the degraded fixed-gain autopilot. Next, the performance of the adaptive autopilot is examined under failure conditions by simulating a scenario where one of the control surfaces is assumed to be stuck at an unknown angle. The adaptive autopilot is also tested in physical flight experiments under degraded-nominal conditions, and the resulting performance improvement is examined.
An Adaptive Digital Autopilot for Fixed-Wing Aircraft with Actuator Faults
Oct 21, 2021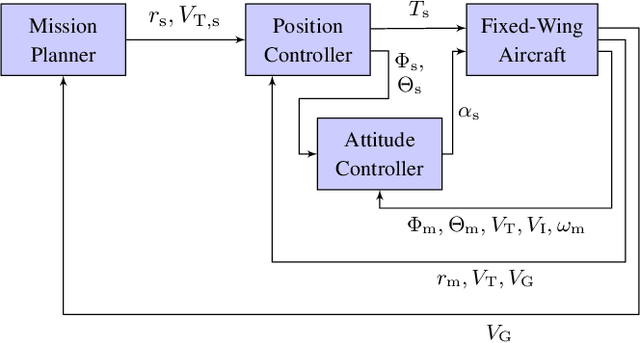
This paper develops an adaptive digital autopilot for a fixed-wing aircraft and compares its performance with a fixed-gain autopilot. The adaptive digital autopilot is constructed by augmenting the autopilot architecture implemented in PX4 flight stack with adaptive digital control laws that are updated using the retrospective cost adaptive control algorithm. In order to investigate the performance of the adaptive digital autopilot, the default gains of the fixed-gain autopilot are scaled down to degrade its performance. This scenario provides a venue for determining the ability of the adaptive digital autopilot to compensate for the detuned fixed-gain autopilot. Next, the performance of the adaptive autopilot is examined under failure conditions by simulating a scenario where one of the control surfaces is assumed to be stuck at an unknown angular position. The adaptive digital autopilot is tested in simulation, and the resulting performance improvements are examined.
An Adaptive PID Autotuner for Multicopters with Experimental Results
Sep 27, 2021



This paper develops an adaptive PID autotuner for multicopters, and presents simulation and experimental results. The autotuner consists of adaptive digital control laws based on retrospective cost adaptive control implemented in the PX4 flight stack. A learning trajectory is used to optimize the autopilot during a single flight. The autotuned autopilot is then compared with the default PX4 autopilot by flying a test trajectory constructed using the second-order Hilbert curve. In order to investigate the sensitivity of the autotuner to the quadcopter dynamics, the mass of the quadcopter is varied, and the performance of the autotuned and default autopilot is compared. It is observed that the autotuned autopilot outperforms the default autopilot.