 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Flight Testing of a Fault-Tolerant Adaptive Autopilot for Fixed-Wing Aircraft
Paper and Code

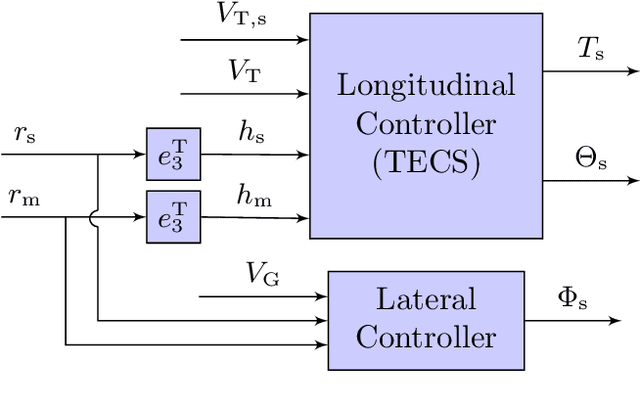


This paper presents an adaptive autopilot for fixed-wing aircraft and compares its performance with a fixed-gain autopilot. The adaptive autopilot is constructed by augmenting the autopilot architecture with adaptive control laws that are updated using retrospective cost adaptive control. In order to investigate the performance of the adaptive autopilot, the default gains of the fixed-gain autopilot are scaled to degrade its performance. This scenario provides a venue for determining the ability of the adaptive autopilot to compensate for the degraded fixed-gain autopilot. Next, the performance of the adaptive autopilot is examined under failure conditions by simulating a scenario where one of the control surfaces is assumed to be stuck at an unknown angle. The adaptive autopilot is also tested in physical flight experiments under degraded-nominal conditions, and the resulting performance improvement is examined.