 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-free Adaptive Output Feedback Vibration Suppression in a Cantilever Beam
Nov 08, 2025This paper presents a model-free adaptive control approach to suppress vibrations in a cantilevered beam excited by an unknown disturbance. The cantilevered beam under harmonic excitation is modeled using a lumped parameter approach. Based on retrospective cost optimization, a sampled-data adaptive controller is developed to suppress vibrations caused by external disturbances. Both displacement and acceleration measurements are considered for feedback. Since acceleration measurements are more sensitive to spillover, which excites higher frequency modes, a filter is developed to extract key displacement information from the acceleration data and enhance suppression performance. The vibration suppression performance is compared using both displacement and acceleration measurements.
Data-driven Fuzzy Control for Time-Optimal Aggressive Trajectory Following
Apr 09, 2025


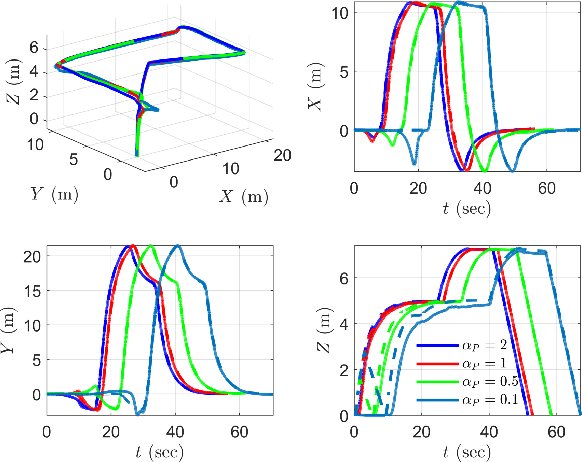
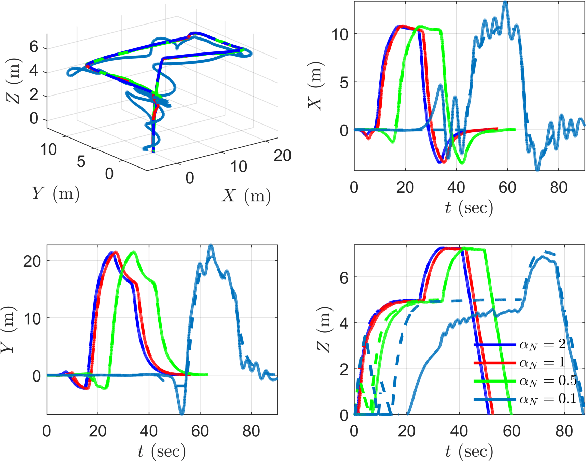
Optimal trajectories that minimize a user-defined cost function in dynamic systems require the solution of a two-point boundary value problem. The optimization process yields an optimal control sequence that depends on the initial conditions and system parameters. However, the optimal sequence may result in undesirable behavior if the system's initial conditions and parameters are erroneous. This work presents a data-driven fuzzy controller synthesis framework that is guided by a time-optimal trajectory for multicopter tracking problems. In particular, we consider an aggressive maneuver consisting of a mid-air flip and generate a time-optimal trajectory by numerically solving the two-point boundary value problem. A fuzzy controller consisting of a stabilizing controller near hover conditions and an autoregressive moving average (ARMA) controller, trained to mimic the time-optimal aggressive trajectory, is constructed using the Takagi-Sugeno fuzzy framework.
Experimental Flight Testing of an Adaptive Autopilot with Parameter Drift Mitigation
Apr 20, 2023



This paper modifies an adaptive multicopter autopilot to mitigate instabilities caused by adaptive parameter drift and presents simulation and experimental results to validate the modified autopilot. The modified adaptive controller is obtained by including a static nonlinearity in the adaptive loop, updated by the retrospective cost adaptive control algorithm. It is shown in simulation and physical test experiments that the adaptive autopilot with proposed modifications can continually improve the fixed-gain autopilot as well as prevent the drift of the adaptive parameters, thus improving the robustness of the adaptive autopilot.
A Tutorial on Neural Networks and Gradient-free Training
Nov 26, 2022This paper presents a compact, matrix-based representation of neural networks in a self-contained tutorial fashion. Specifically, we develop neural networks as a composition of several vector-valued functions. Although neural networks are well-understood pictorially in terms of interconnected neurons, neural networks are mathematical nonlinear functions constructed by composing several vector-valued functions. Using basic results from linear algebra, we represent a neural network as an alternating sequence of linear maps and scalar nonlinear functions, also known as activation functions. The training of neural networks requires the minimization of a cost function, which in turn requires the computation of a gradient. Using basic multivariable calculus results, the cost gradient is also shown to be a function composed of a sequence of linear maps and nonlinear functions. In addition to the analytical gradient computation, we consider two gradient-free training methods and compare the three training methods in terms of convergence rate and prediction accuracy.
Experimental Flight Testing of a Fault-Tolerant Adaptive Autopilot for Fixed-Wing Aircraft
Oct 24, 2022


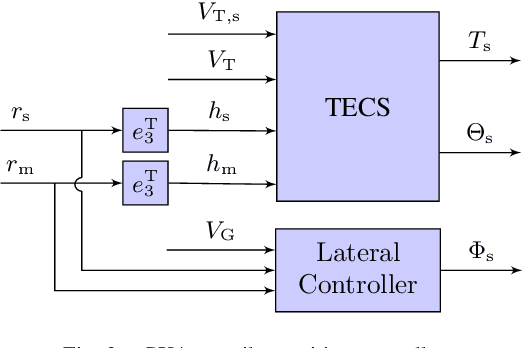
This paper presents an adaptive autopilot for fixed-wing aircraft and compares its performance with a fixed-gain autopilot. The adaptive autopilot is constructed by augmenting the autopilot architecture with adaptive control laws that are updated using retrospective cost adaptive control. In order to investigate the performance of the adaptive autopilot, the default gains of the fixed-gain autopilot are scaled to degrade its performance. This scenario provides a venue for determining the ability of the adaptive autopilot to compensate for the degraded fixed-gain autopilot. Next, the performance of the adaptive autopilot is examined under failure conditions by simulating a scenario where one of the control surfaces is assumed to be stuck at an unknown angle. The adaptive autopilot is also tested in physical flight experiments under degraded-nominal conditions, and the resulting performance improvement is examined.
An Adaptive Digital Autopilot for Fixed-Wing Aircraft with Actuator Faults
Oct 21, 2021
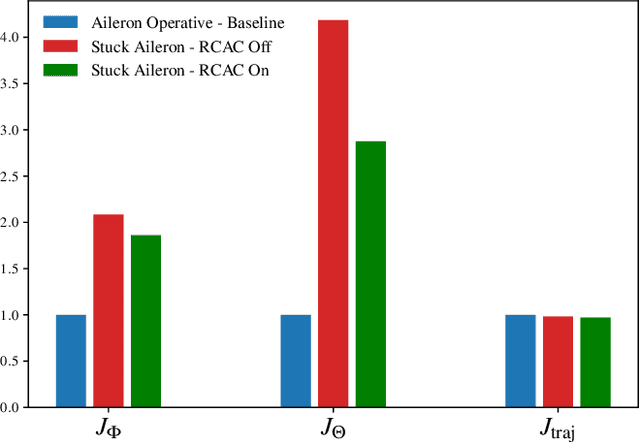
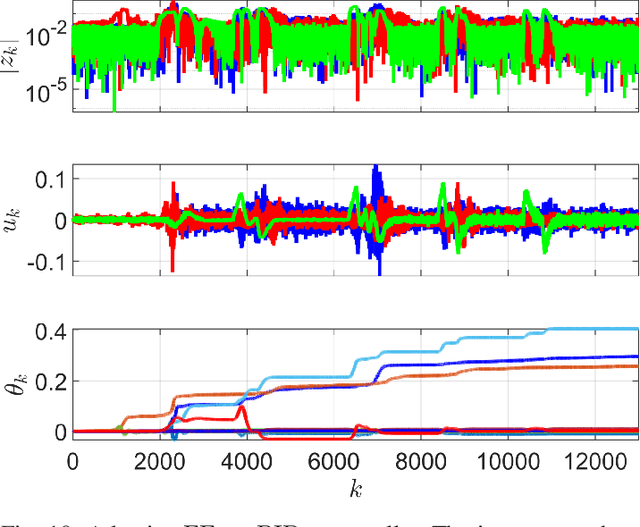
This paper develops an adaptive digital autopilot for a fixed-wing aircraft and compares its performance with a fixed-gain autopilot. The adaptive digital autopilot is constructed by augmenting the autopilot architecture implemented in PX4 flight stack with adaptive digital control laws that are updated using the retrospective cost adaptive control algorithm. In order to investigate the performance of the adaptive digital autopilot, the default gains of the fixed-gain autopilot are scaled down to degrade its performance. This scenario provides a venue for determining the ability of the adaptive digital autopilot to compensate for the detuned fixed-gain autopilot. Next, the performance of the adaptive autopilot is examined under failure conditions by simulating a scenario where one of the control surfaces is assumed to be stuck at an unknown angular position. The adaptive digital autopilot is tested in simulation, and the resulting performance improvements are examined.
An Adaptive PID Autotuner for Multicopters with Experimental Results
Sep 27, 2021



This paper develops an adaptive PID autotuner for multicopters, and presents simulation and experimental results. The autotuner consists of adaptive digital control laws based on retrospective cost adaptive control implemented in the PX4 flight stack. A learning trajectory is used to optimize the autopilot during a single flight. The autotuned autopilot is then compared with the default PX4 autopilot by flying a test trajectory constructed using the second-order Hilbert curve. In order to investigate the sensitivity of the autotuner to the quadcopter dynamics, the mass of the quadcopter is varied, and the performance of the autotuned and default autopilot is compared. It is observed that the autotuned autopilot outperforms the default autopilot.
Adaptive Digital PID Control of a Quadcopter with Unknown Dynamics
May 31, 2020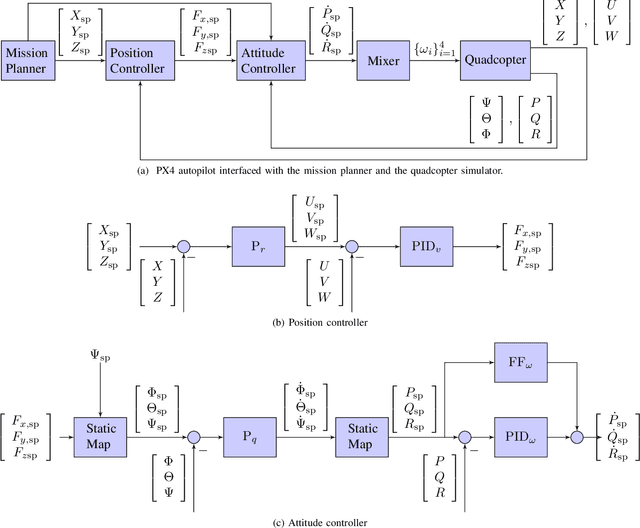
This paper develops an adaptive autopilot for quadcopters with unknown dynamics. To do this, the PX4 autopilot architecture is modified so that the feedback and feedforward controllers are replaced by adaptive control laws based on retrospective cost adaptive control (RCAC). The present paper provides a numerical investigation of the performance of the adaptive autopilot on a quadcopter with unknown dynamics. In order to reflect the absence of prior modeling information, all of the adaptive digital controllers are initialized at zero gains. In addition, moment-of-inertia of the quadcopter is varied to test the robustness of the adaptive autopilot. In all test cases, the vehicle is commanded to follow a given trajectory, and the resulting performance is examined.