 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven Fuzzy Control for Time-Optimal Aggressive Trajectory Following
Paper and Code
Apr 09, 2025

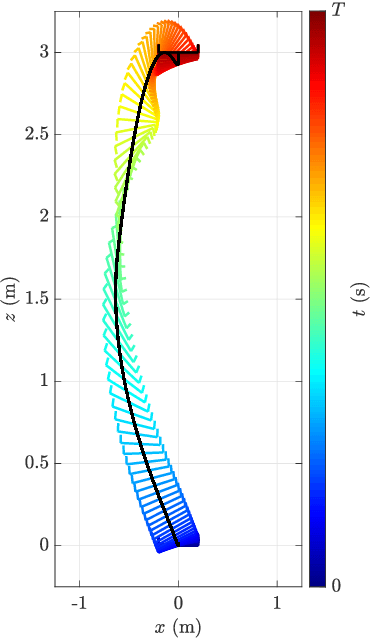

Optimal trajectories that minimize a user-defined cost function in dynamic systems require the solution of a two-point boundary value problem. The optimization process yields an optimal control sequence that depends on the initial conditions and system parameters. However, the optimal sequence may result in undesirable behavior if the system's initial conditions and parameters are erroneous. This work presents a data-driven fuzzy controller synthesis framework that is guided by a time-optimal trajectory for multicopter tracking problems. In particular, we consider an aggressive maneuver consisting of a mid-air flip and generate a time-optimal trajectory by numerically solving the two-point boundary value problem. A fuzzy controller consisting of a stabilizing controller near hover conditions and an autoregressive moving average (ARMA) controller, trained to mimic the time-optimal aggressive trajectory, is constructed using the Takagi-Sugeno fuzzy framework.