 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultirotor Ensemble Model Predictive Control I: Simulation Experiments
Paper and Code
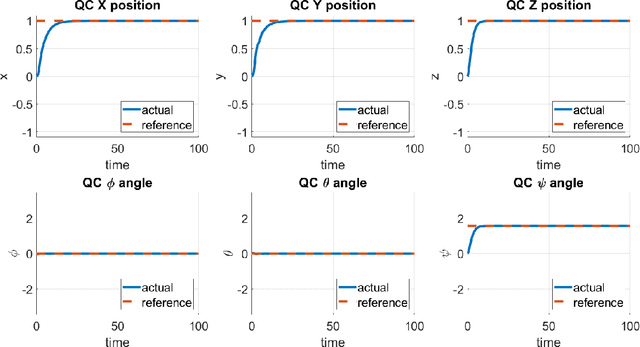



Nonlinear receding horizon model predictive control is a powerful approach to controlling nonlinear dynamical systems. However, typical approaches that use the Jacobian, adjoint, and forward-backward passes may lose fidelity and efficacy for highly nonlinear problems. Here, we develop an Ensemble Model Predictive Control (EMPC) approach wherein the forward model remains fully nonlinear, and an ensemble-represented Gaussian process performs the backward calculations to determine optimal gains for the initial time. EMPC admits black box, possible non-differentiable models, simulations are executable in parallel over long horizons, and control is uncertainty quantifying and applicable to stochastic settings. We construct the EMPC for terminal control and regulation problems and apply it to the control of a quadrotor in a simulated, identical-twin study. Results suggest that the easily implemented approach is promising and amenable to controlling autonomous robotic systems with added state/parameter estimation and parallel computing.