 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGelLink: A Compact Multi-phalanx Finger with Vision-based Tactile Sensing and Proprioception
Paper and Code
Mar 25, 2024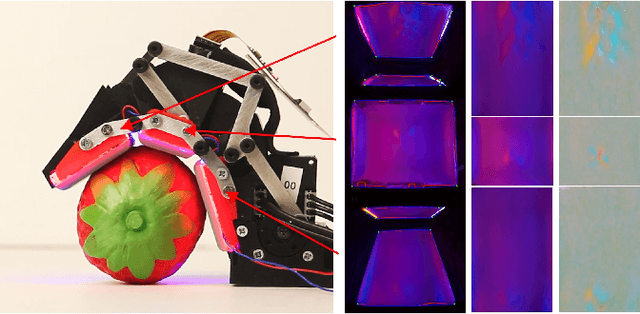
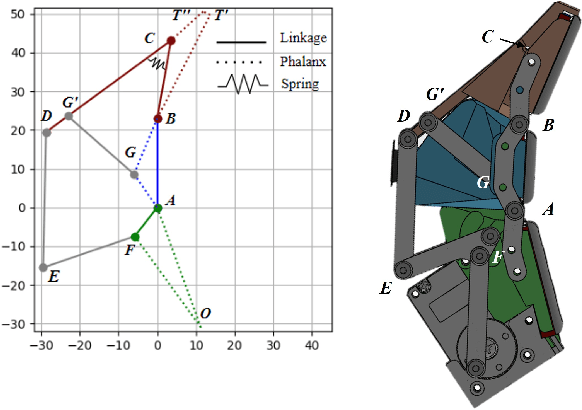
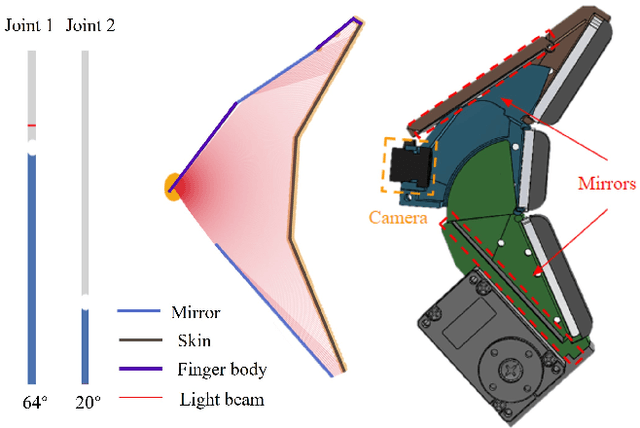
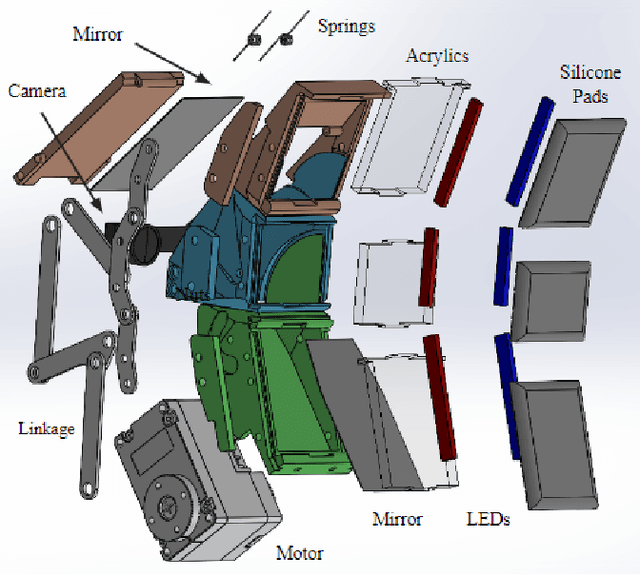
Compared to fully-actuated robotic end-effectors, underactuated ones are generally more adaptive, robust, and cost-effective. However, state estimation for underactuated hands is usually more challenging. Vision-based tactile sensors, like Gelsight, can mitigate this issue by providing high-resolution tactile sensing and accurate proprioceptive sensing. As such, we present GelLink, a compact, underactuated, linkage-driven robotic finger with low-cost, high-resolution vision-based tactile sensing and proprioceptive sensing capabilities. In order to reduce the amount of embedded hardware, i.e. the cameras and motors, we optimize the linkage transmission with a planar linkage mechanism simulator and develop a planar reflection simulator to simplify the tactile sensing hardware. As a result, GelLink only requires one motor to actuate the three phalanges, and one camera to capture tactile signals along the entire finger. Overall, GelLink is a compact robotic finger that shows adaptability and robustness when performing grasping tasks. The integration of vision-based tactile sensors can significantly enhance the capabilities of underactuated fingers and potentially broaden their future usage.