 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkillHarm: Lifecycle-Aware Skill-Based Attacks via Automated Construction
Jun 01, 2026Agent skills occupy a privileged position in the agent workflow, as agents are expected to implicitly follow and execute them, rendering third-party skills a vulnerable attack surface. Existing studies have revealed unsafe agent behaviors induced by skill-based attacks, but they primarily evaluate poisoned skills within a single task execution and enumerate harms through ad-hoc risk lists. To bridge these gaps, we introduce SkillHarm, a benchmark of skill-based attacks across the skill-use lifecycle, paired with a systematic taxonomy of skill-relevant risks. SkillHarm evaluates two attack scenarios: Fixed-Payload Poisoning (FPP), where a fixed poisoned skill package directly compromises any task session that invokes it, and Self-Mutating Poisoning (SMP), where an initially benign execution silently mutates persistent skill content, deferring harm until a subsequent reuse. It further defines 12 risk types based on the agent workflow component targeted by the harm: data pipelines, system environments, and agent autonomy. To instantiate these attacks at scale, we build AutoSkillHarm, an automated construction pipeline with coding agents driven by natural-language harnesses. The resulting benchmark contains 879 attack samples across 71 skills. Experiments show that current agents remain vulnerable with attack success rates up to 86.3% in FPP and 69.3% in SMP. Our analysis further reveals a latent risk: many apparent attack failures stem from the agent failing to engage with the poisoned file rather than genuine resistance, and current defenses still fail to reliably mitigate the threat.
QUEST: Training Frontier Deep Research Agents with Fully Synthetic Tasks
May 22, 2026Deep research agents extend the role of search engines from retrieving keyword-matched pages to synthesizing knowledge, fundamentally changing how humans interact with information. However, frontier systems remain proprietary, while existing open agents often generalize poorly across different task types, leaving unclear how to train a broadly capable deep research agent. We release QUEST, a family of open models (ranging from 2B to 35B) that serve as general-purpose deep research agents designed to handle a wide range of long-horizon search tasks, with strong capabilities in fact seeking, citation grounding, and report synthesis. To build QUEST, we propose an effective training recipe combining mid-training, supervised fine-tuning, and reinforcement learning. Central to this recipe is a curated data synthesis pipeline based on unified rubric trees, which applies to different task types and enables synthesizing training data with verifiable rewards without human annotation. In addition, QUEST incorporates a built-in context management mechanism that enables effective long-horizon reasoning and knowledge synthesis. Using only 8K synthesized tasks, QUEST approaches or even surpasses frontier closed-source agents across eight deep research benchmarks spanning diverse task types, and achieves the best overall performance among recent open-weight agents. We released everything: models, data, and training scripts.
Mind2Web 2: Evaluating Agentic Search with Agent-as-a-Judge
Jun 26, 2025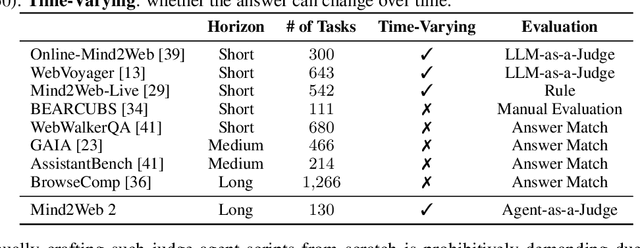
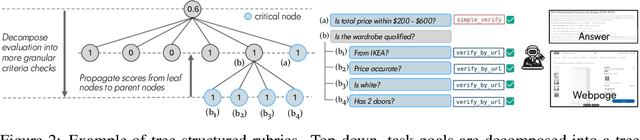
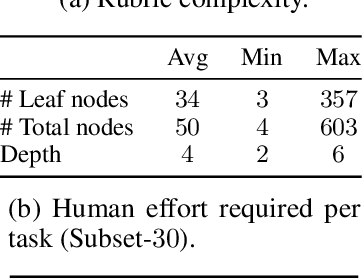
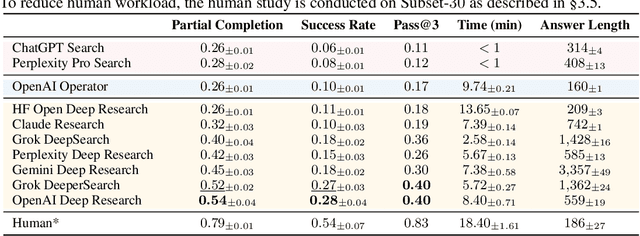
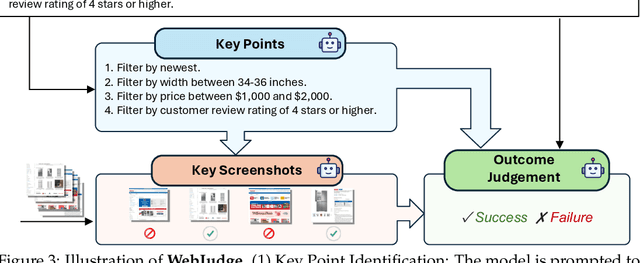
Agentic search such as Deep Research systems, where large language models autonomously browse the web, synthesize information, and return comprehensive citation-backed answers, represents a major shift in how users interact with web-scale information. While promising greater efficiency and cognitive offloading, the growing complexity and open-endedness of agentic search have outpaced existing evaluation benchmarks and methodologies, which largely assume short search horizons and static answers. In this paper, we introduce Mind2Web 2, a benchmark of 130 realistic, high-quality, and long-horizon tasks that require real-time web browsing and extensive information synthesis, constructed with over 1,000 hours of human labor. To address the challenge of evaluating time-varying and complex answers, we propose a novel Agent-as-a-Judge framework. Our method constructs task-specific judge agents based on a tree-structured rubric design to automatically assess both answer correctness and source attribution. We conduct a comprehensive evaluation of nine frontier agentic search systems and human performance, along with a detailed error analysis to draw insights for future development. The best-performing system, OpenAI Deep Research, can already achieve 50-70% of human performance while spending half the time, showing a great potential. Altogether, Mind2Web 2 provides a rigorous foundation for developing and benchmarking the next generation of agentic search systems.
An Illusion of Progress? Assessing the Current State of Web Agents
Apr 02, 2025
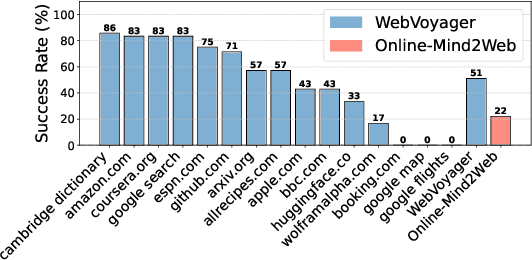
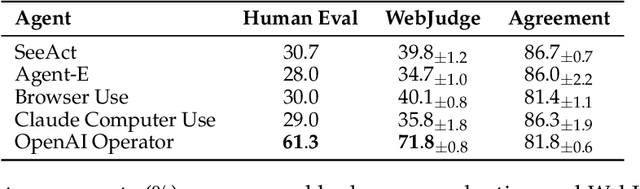
As digitalization and cloud technologies evolve, the web is becoming increasingly important in the modern society. Autonomous web agents based on large language models (LLMs) hold a great potential in work automation. It is therefore important to accurately measure and monitor the progression of their capabilities. In this work, we conduct a comprehensive and rigorous assessment of the current state of web agents. Our results depict a very different picture of the competency of current agents, suggesting over-optimism in previously reported results. This gap can be attributed to shortcomings in existing benchmarks. We introduce Online-Mind2Web, an online evaluation benchmark consisting of 300 diverse and realistic tasks spanning 136 websites. It enables us to evaluate web agents under a setting that approximates how real users use these agents. To facilitate more scalable evaluation and development, we also develop a novel LLM-as-a-Judge automatic evaluation method and show that it can achieve around 85% agreement with human judgment, substantially higher than existing methods. Finally, we present the first comprehensive comparative analysis of current web agents, highlighting both their strengths and limitations to inspire future research.
Explorer: Scaling Exploration-driven Web Trajectory Synthesis for Multimodal Web Agents
Feb 19, 2025Recent success in large multimodal models (LMMs) has sparked promising applications of agents capable of autonomously completing complex web tasks. While open-source LMM agents have made significant advances in offline evaluation benchmarks, their performance still falls substantially short of human-level capabilities in more realistic online settings. A key bottleneck is the lack of diverse and large-scale trajectory-level datasets across various domains, which are expensive to collect. In this paper, we address this challenge by developing a scalable recipe to synthesize the largest and most diverse trajectory-level dataset to date, containing over 94K successful multimodal web trajectories, spanning 49K unique URLs, 720K screenshots, and 33M web elements. In particular, we leverage extensive web exploration and refinement to obtain diverse task intents. The average cost is 28 cents per successful trajectory, making it affordable to a wide range of users in the community. Leveraging this dataset, we train Explorer, a multimodal web agent, and demonstrate strong performance on both offline and online web agent benchmarks such as Mind2Web-Live, Multimodal-Mind2Web, and MiniWob++. Additionally, our experiments highlight data scaling as a key driver for improving web agent capabilities. We hope this study makes state-of-the-art LMM-based agent research at a larger scale more accessible.
Tooling or Not Tooling? The Impact of Tools on Language Agents for Chemistry Problem Solving
Nov 11, 2024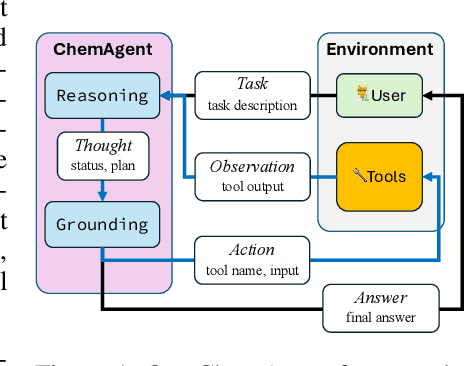
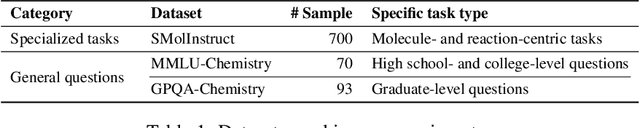
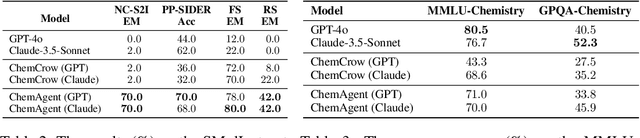
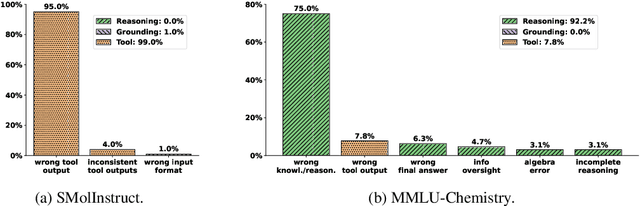
To enhance large language models (LLMs) for chemistry problem solving, several LLM-based agents augmented with tools have been proposed, such as ChemCrow and Coscientist. However, their evaluations are narrow in scope, leaving a large gap in understanding the benefits of tools across diverse chemistry tasks. To bridge this gap, we develop ChemAgent, an enhanced chemistry agent over ChemCrow, and conduct a comprehensive evaluation of its performance on both specialized chemistry tasks and general chemistry questions. Surprisingly, ChemAgent does not consistently outperform its base LLMs without tools. Our error analysis with a chemistry expert suggests that: For specialized chemistry tasks, such as synthesis prediction, we should augment agents with specialized tools; however, for general chemistry questions like those in exams, agents' ability to reason correctly with chemistry knowledge matters more, and tool augmentation does not always help.
Is Your LLM Secretly a World Model of the Internet? Model-Based Planning for Web Agents
Nov 10, 2024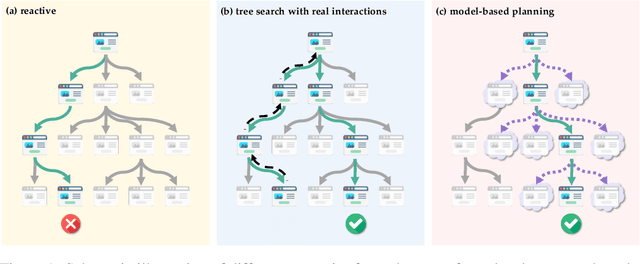
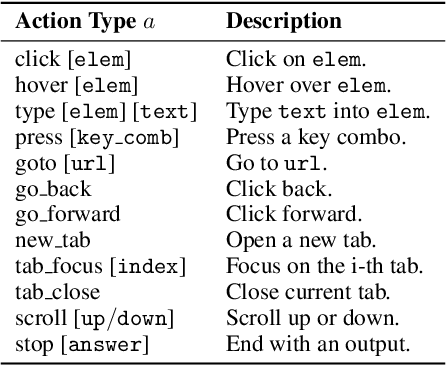
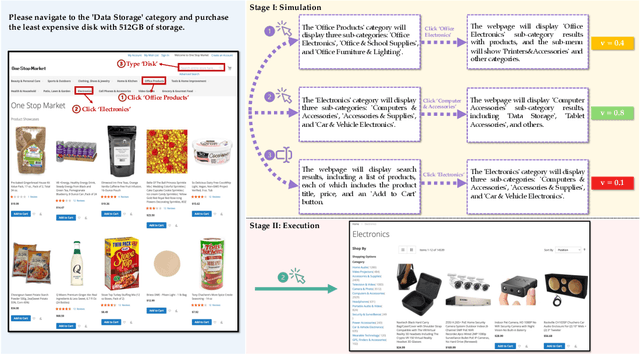
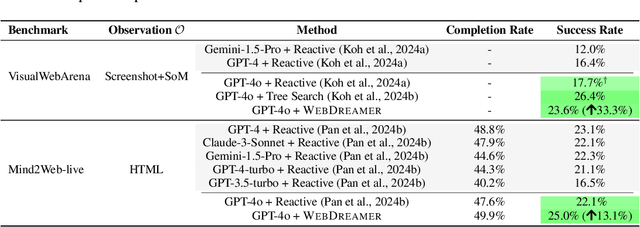
Language agents have demonstrated promising capabilities in automating web-based tasks, though their current reactive approaches still underperform largely compared to humans. While incorporating advanced planning algorithms, particularly tree search methods, could enhance these agents' performance, implementing tree search directly on live websites poses significant safety risks and practical constraints due to irreversible actions such as confirming a purchase. In this paper, we introduce a novel paradigm that augments language agents with model-based planning, pioneering the innovative use of large language models (LLMs) as world models in complex web environments. Our method, WebDreamer, builds on the key insight that LLMs inherently encode comprehensive knowledge about website structures and functionalities. Specifically, WebDreamer uses LLMs to simulate outcomes for each candidate action (e.g., "what would happen if I click this button?") using natural language descriptions, and then evaluates these imagined outcomes to determine the optimal action at each step. Empirical results on two representative web agent benchmarks with online interaction -- VisualWebArena and Mind2Web-live -- demonstrate that WebDreamer achieves substantial improvements over reactive baselines. By establishing the viability of LLMs as world models in web environments, this work lays the groundwork for a paradigm shift in automated web interaction. More broadly, our findings open exciting new avenues for future research into 1) optimizing LLMs specifically for world modeling in complex, dynamic environments, and 2) model-based speculative planning for language agents.
Navigating the Digital World as Humans Do: Universal Visual Grounding for GUI Agents
Oct 07, 2024



Multimodal large language models (MLLMs) are transforming the capabilities of graphical user interface (GUI) agents, facilitating their transition from controlled simulations to complex, real-world applications across various platforms. However, the effectiveness of these agents hinges on the robustness of their grounding capability. Current GUI agents predominantly utilize text-based representations such as HTML or accessibility trees, which, despite their utility, often introduce noise, incompleteness, and increased computational overhead. In this paper, we advocate a human-like embodiment for GUI agents that perceive the environment entirely visually and directly take pixel-level operations on the GUI. The key is visual grounding models that can accurately map diverse referring expressions of GUI elements to their coordinates on the GUI across different platforms. We show that a simple recipe, which includes web-based synthetic data and slight adaptation of the LLaVA architecture, is surprisingly effective for training such visual grounding models. We collect the largest dataset for GUI visual grounding so far, containing 10M GUI elements and their referring expressions over 1.3M screenshots, and use it to train UGround, a strong universal visual grounding model for GUI agents. Empirical results on six benchmarks spanning three categories (grounding, offline agent, and online agent) show that 1) UGround substantially outperforms existing visual grounding models for GUI agents, by up to 20% absolute, and 2) agents with UGround outperform state-of-the-art agents, despite the fact that existing agents use additional text-based input while ours only uses visual perception. These results provide strong support for the feasibility and promises of GUI agents that navigate the digital world as humans do.
GPT-4V is a Generalist Web Agent, if Grounded
Jan 03, 2024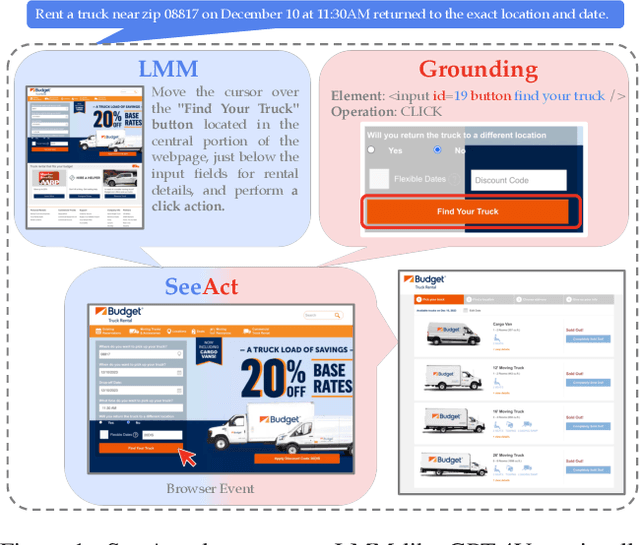
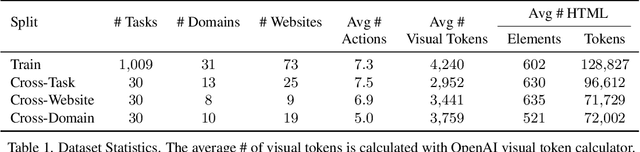
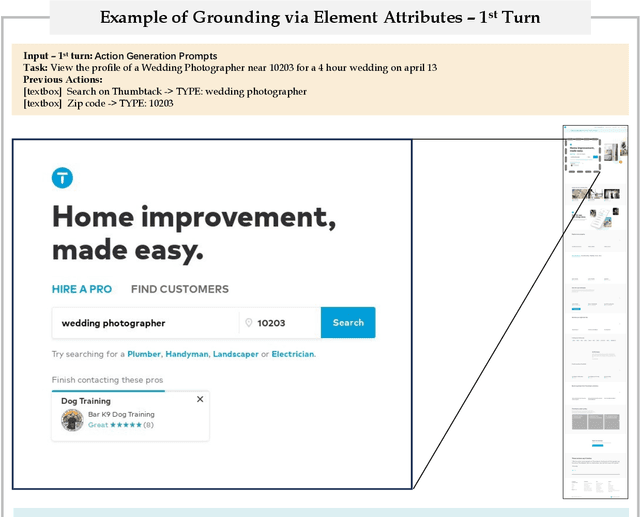
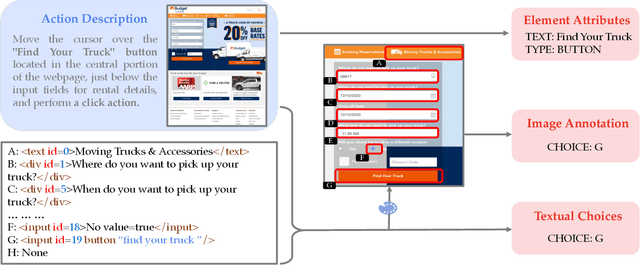
The recent development on large multimodal models (LMMs), especially GPT-4V(ision) and Gemini, has been quickly expanding the capability boundaries of multimodal models beyond traditional tasks like image captioning and visual question answering. In this work, we explore the potential of LMMs like GPT-4V as a generalist web agent that can follow natural language instructions to complete tasks on any given website. We propose SEEACT, a generalist web agent that harnesses the power of LMMs for integrated visual understanding and acting on the web. We evaluate on the recent MIND2WEB benchmark. In addition to standard offline evaluation on cached websites, we enable a new online evaluation setting by developing a tool that allows running web agents on live websites. We show that GPT-4V presents a great potential for web agents - it can successfully complete 50% of the tasks on live websites if we manually ground its textual plans into actions on the websites. This substantially outperforms text-only LLMs like GPT-4 or smaller models (FLAN-T5 and BLIP-2) specifically fine-tuned for web agents. However, grounding still remains a major challenge. Existing LMM grounding strategies like set-of-mark prompting turns out not effective for web agents, and the best grounding strategy we develop in this paper leverages both the HTML text and visuals. Yet, there is still a substantial gap with oracle grounding, leaving ample room for further improvement.