 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen the City Teaches the Car: Label-Free 3D Perception from Infrastructure
Mar 17, 2026Building robust 3D perception for self-driving still relies heavily on large-scale data collection and manual annotation, yet this paradigm becomes impractical as deployment expands across diverse cities and regions. Meanwhile, modern cities are increasingly instrumented with roadside units (RSUs), static sensors deployed along roads and at intersections to monitor traffic. This raises a natural question: can the city itself help train the vehicle? We propose infrastructure-taught, label-free 3D perception, a paradigm in which RSUs act as stationary, unsupervised teachers for ego vehicles. Leveraging their fixed viewpoints and repeated observations, RSUs learn local 3D detectors from unlabeled data and broadcast predictions to passing vehicles, which are aggregated as pseudo-label supervision for training a standalone ego detector. The resulting model requires no infrastructure or communication at test time. We instantiate this idea as a fully label-free three-stage pipeline and conduct a concept-and-feasibility study in a CARLA-based multi-agent environment. With CenterPoint, our pipeline achieves 82.3% AP for detecting vehicles, compared to a fully supervised ego upper bound of 94.4%. We further systematically analyze each stage, evaluate its scalability, and demonstrate complementarity with existing ego-centric label-free methods. Together, these results suggest that city infrastructure itself can potentially provide a scalable supervisory signal for autonomous vehicles, positioning infrastructure-taught learning as a promising orthogonal paradigm for reducing annotation cost in 3D perception.
On the Feasibility and Opportunity of Autoregressive 3D Object Detection
Mar 09, 2026LiDAR-based 3D object detectors typically rely on proposal heads with hand-crafted components like anchor assignment and non-maximum suppression (NMS), complicating training and limiting extensibility. We present AutoReg3D, an autoregressive 3D detector that casts detection as sequence generation. Given point-cloud features, AutoReg3D emits objects in a range-causal (near-to-far) order and encodes each object as a short, discrete-token sequence consisting of its center, size, orientation, velocity, and class. This near-to-far ordering mirrors LiDAR geometry--near objects occlude far ones but not vice versa--enabling straightforward teacher forcing during training and autoregressive decoding at test time. AutoReg3D is compatible across diverse point-cloud or backbones and attains competitive nuScenes performance without anchors or NMS. Beyond parity, the sequential formulation unlocks language-model advances for 3D perception, including GRPO-style reinforcement learning for task-aligned objectives. These results position autoregressive decoding as a viable, flexible alternative for LiDAR-based detection and open a path to importing modern sequence-modeling tools into 3D perception.
Mind2Web 2: Evaluating Agentic Search with Agent-as-a-Judge
Jun 26, 2025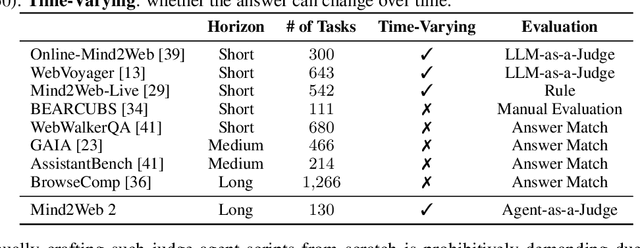
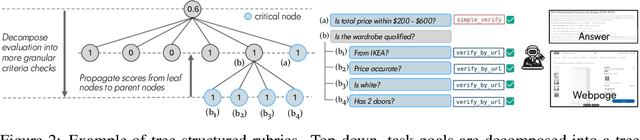
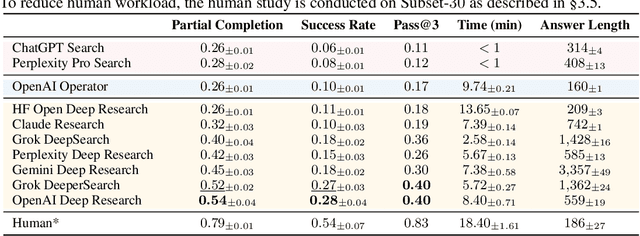
Agentic search such as Deep Research systems, where large language models autonomously browse the web, synthesize information, and return comprehensive citation-backed answers, represents a major shift in how users interact with web-scale information. While promising greater efficiency and cognitive offloading, the growing complexity and open-endedness of agentic search have outpaced existing evaluation benchmarks and methodologies, which largely assume short search horizons and static answers. In this paper, we introduce Mind2Web 2, a benchmark of 130 realistic, high-quality, and long-horizon tasks that require real-time web browsing and extensive information synthesis, constructed with over 1,000 hours of human labor. To address the challenge of evaluating time-varying and complex answers, we propose a novel Agent-as-a-Judge framework. Our method constructs task-specific judge agents based on a tree-structured rubric design to automatically assess both answer correctness and source attribution. We conduct a comprehensive evaluation of nine frontier agentic search systems and human performance, along with a detailed error analysis to draw insights for future development. The best-performing system, OpenAI Deep Research, can already achieve 50-70% of human performance while spending half the time, showing a great potential. Altogether, Mind2Web 2 provides a rigorous foundation for developing and benchmarking the next generation of agentic search systems.
Static Segmentation by Tracking: A Frustratingly Label-Efficient Approach to Fine-Grained Segmentation
Jan 12, 2025



We study image segmentation in the biological domain, particularly trait and part segmentation from specimen images (e.g., butterfly wing stripes or beetle body parts). This is a crucial, fine-grained task that aids in understanding the biology of organisms. The conventional approach involves hand-labeling masks, often for hundreds of images per species, and training a segmentation model to generalize these labels to other images, which can be exceedingly laborious. We present a label-efficient method named Static Segmentation by Tracking (SST). SST is built upon the insight: while specimens of the same species have inherent variations, the traits and parts we aim to segment show up consistently. This motivates us to concatenate specimen images into a ``pseudo-video'' and reframe trait and part segmentation as a tracking problem. Concretely, SST generates masks for unlabeled images by propagating annotated or predicted masks from the ``pseudo-preceding'' images. Powered by Segment Anything Model 2 (SAM~2) initially developed for video segmentation, we show that SST can achieve high-quality trait and part segmentation with merely one labeled image per species -- a breakthrough for analyzing specimen images. We further develop a cycle-consistent loss to fine-tune the model, again using one labeled image. Additionally, we highlight the broader potential of SST, including one-shot instance segmentation on images taken in the wild and trait-based image retrieval.
Coaching a Teachable Student
Jun 16, 2023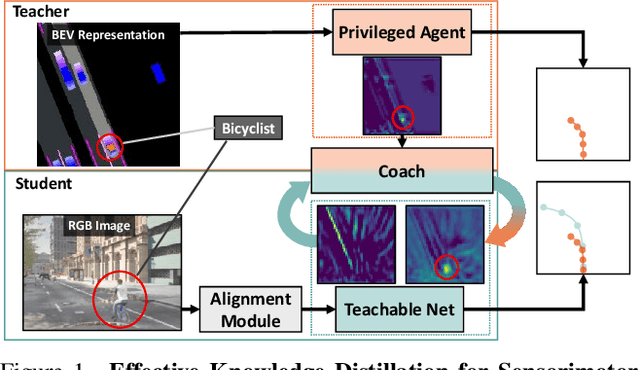
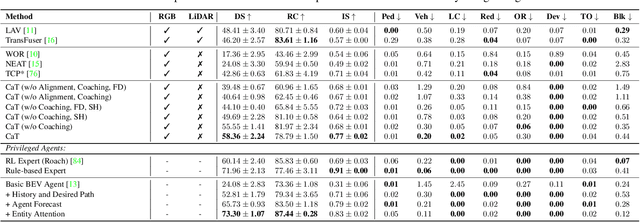
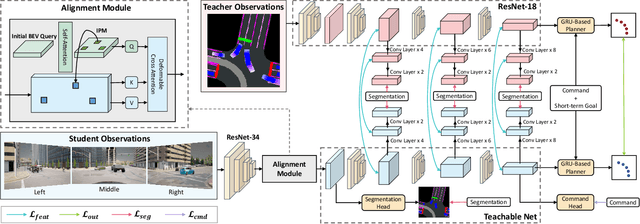
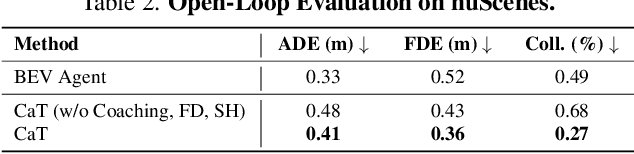
We propose a novel knowledge distillation framework for effectively teaching a sensorimotor student agent to drive from the supervision of a privileged teacher agent. Current distillation for sensorimotor agents methods tend to result in suboptimal learned driving behavior by the student, which we hypothesize is due to inherent differences between the input, modeling capacity, and optimization processes of the two agents. We develop a novel distillation scheme that can address these limitations and close the gap between the sensorimotor agent and its privileged teacher. Our key insight is to design a student which learns to align their input features with the teacher's privileged Bird's Eye View (BEV) space. The student then can benefit from direct supervision by the teacher over the internal representation learning. To scaffold the difficult sensorimotor learning task, the student model is optimized via a student-paced coaching mechanism with various auxiliary supervision. We further propose a high-capacity imitation learned privileged agent that surpasses prior privileged agents in CARLA and ensures the student learns safe driving behavior. Our proposed sensorimotor agent results in a robust image-based behavior cloning agent in CARLA, improving over current models by over 20.6% in driving score without requiring LiDAR, historical observations, ensemble of models, on-policy data aggregation or reinforcement learning.