 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative AI Meets Wireless Sensing: Towards Wireless Foundation Model
Sep 18, 2025



Generative Artificial Intelligence (GenAI) has made significant advancements in fields such as computer vision (CV) and natural language processing (NLP), demonstrating its capability to synthesize high-fidelity data and improve generalization. Recently, there has been growing interest in integrating GenAI into wireless sensing systems. By leveraging generative techniques such as data augmentation, domain adaptation, and denoising, wireless sensing applications, including device localization, human activity recognition, and environmental monitoring, can be significantly improved. This survey investigates the convergence of GenAI and wireless sensing from two complementary perspectives. First, we explore how GenAI can be integrated into wireless sensing pipelines, focusing on two modes of integration: as a plugin to augment task-specific models and as a solver to directly address sensing tasks. Second, we analyze the characteristics of mainstream generative models, such as Generative Adversarial Networks (GANs), Variational Autoencoders (VAEs), and diffusion models, and discuss their applicability and unique advantages across various wireless sensing tasks. We further identify key challenges in applying GenAI to wireless sensing and outline a future direction toward a wireless foundation model: a unified, pre-trained design capable of scalable, adaptable, and efficient signal understanding across diverse sensing tasks.
Multi-Class Segmentation of Aortic Branches and Zones in Computed Tomography Angiography: The AortaSeg24 Challenge
Feb 07, 2025



Multi-class segmentation of the aorta in computed tomography angiography (CTA) scans is essential for diagnosing and planning complex endovascular treatments for patients with aortic dissections. However, existing methods reduce aortic segmentation to a binary problem, limiting their ability to measure diameters across different branches and zones. Furthermore, no open-source dataset is currently available to support the development of multi-class aortic segmentation methods. To address this gap, we organized the AortaSeg24 MICCAI Challenge, introducing the first dataset of 100 CTA volumes annotated for 23 clinically relevant aortic branches and zones. This dataset was designed to facilitate both model development and validation. The challenge attracted 121 teams worldwide, with participants leveraging state-of-the-art frameworks such as nnU-Net and exploring novel techniques, including cascaded models, data augmentation strategies, and custom loss functions. We evaluated the submitted algorithms using the Dice Similarity Coefficient (DSC) and Normalized Surface Distance (NSD), highlighting the approaches adopted by the top five performing teams. This paper presents the challenge design, dataset details, evaluation metrics, and an in-depth analysis of the top-performing algorithms. The annotated dataset, evaluation code, and implementations of the leading methods are publicly available to support further research. All resources can be accessed at https://aortaseg24.grand-challenge.org.
RoCoSDF: Row-Column Scanned Neural Signed Distance Fields for Freehand 3D Ultrasound Imaging Shape Reconstruction
Aug 14, 2024



The reconstruction of high-quality shape geometry is crucial for developing freehand 3D ultrasound imaging. However, the shape reconstruction of multi-view ultrasound data remains challenging due to the elevation distortion caused by thick transducer probes. In this paper, we present a novel learning-based framework RoCoSDF, which can effectively generate an implicit surface through continuous shape representations derived from row-column scanned datasets. In RoCoSDF, we encode the datasets from different views into the corresponding neural signed distance function (SDF) and then operate all SDFs in a normalized 3D space to restore the actual surface contour. Without requiring pre-training on large-scale ground truth shapes, our approach can synthesize a smooth and continuous signed distance field from multi-view SDFs to implicitly represent the actual geometry. Furthermore, two regularizers are introduced to facilitate shape refinement by constraining the SDF near the surface. The experiments on twelve shapes data acquired by two ultrasound transducer probes validate that RoCoSDF can effectively reconstruct accurate geometric shapes from multi-view ultrasound data, which outperforms current reconstruction methods. Code is available at https://github.com/chenhbo/RoCoSDF.
RF-Diffusion: Radio Signal Generation via Time-Frequency Diffusion
Apr 14, 2024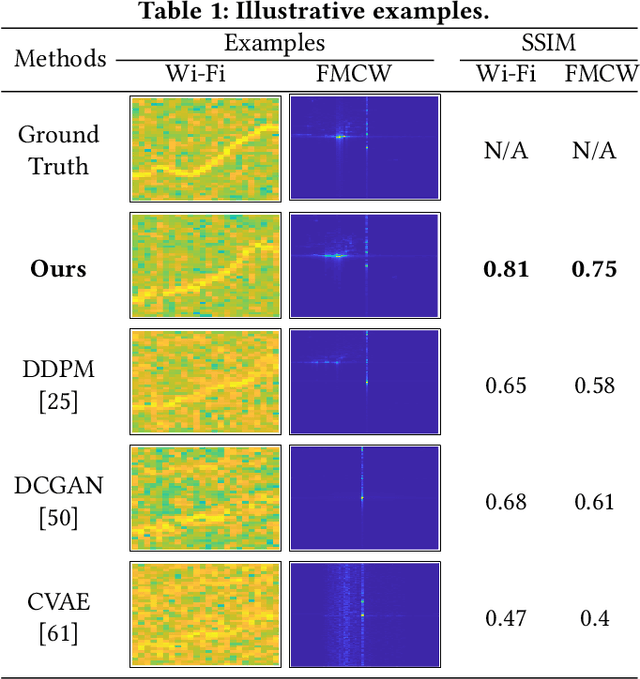
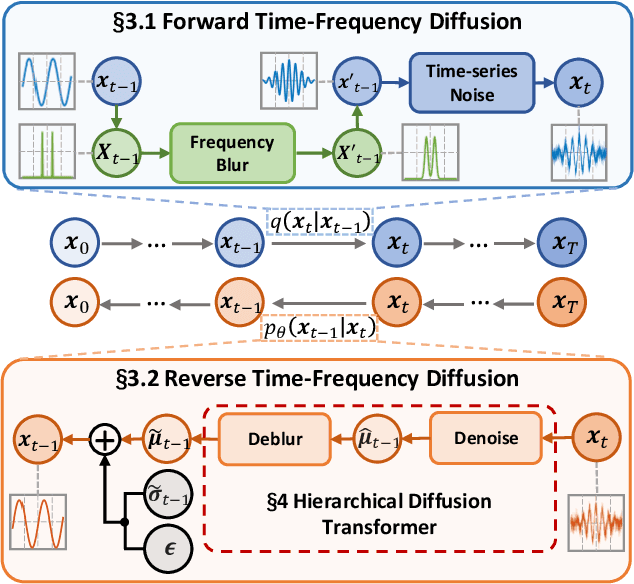
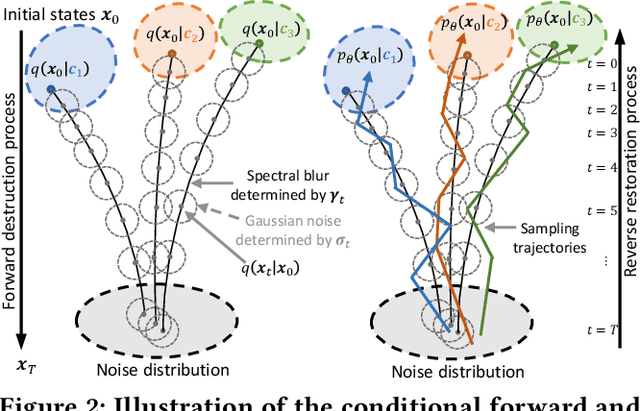
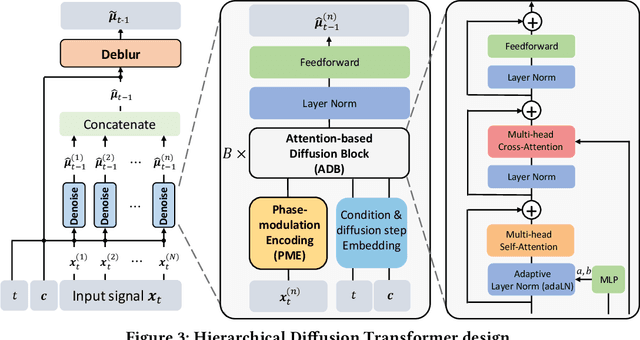
Along with AIGC shines in CV and NLP, its potential in the wireless domain has also emerged in recent years. Yet, existing RF-oriented generative solutions are ill-suited for generating high-quality, time-series RF data due to limited representation capabilities. In this work, inspired by the stellar achievements of the diffusion model in CV and NLP, we adapt it to the RF domain and propose RF-Diffusion. To accommodate the unique characteristics of RF signals, we first introduce a novel Time-Frequency Diffusion theory to enhance the original diffusion model, enabling it to tap into the information within the time, frequency, and complex-valued domains of RF signals. On this basis, we propose a Hierarchical Diffusion Transformer to translate the theory into a practical generative DNN through elaborated design spanning network architecture, functional block, and complex-valued operator, making RF-Diffusion a versatile solution to generate diverse, high-quality, and time-series RF data. Performance comparison with three prevalent generative models demonstrates the RF-Diffusion's superior performance in synthesizing Wi-Fi and FMCW signals. We also showcase the versatility of RF-Diffusion in boosting Wi-Fi sensing systems and performing channel estimation in 5G networks.
Training-free image style alignment for self-adapting domain shift on handheld ultrasound devices
Feb 17, 2024



Handheld ultrasound devices face usage limitations due to user inexperience and cannot benefit from supervised deep learning without extensive expert annotations. Moreover, the models trained on standard ultrasound device data are constrained by training data distribution and perform poorly when directly applied to handheld device data. In this study, we propose the Training-free Image Style Alignment (TISA) framework to align the style of handheld device data to those of standard devices. The proposed TISA can directly infer handheld device images without extra training and is suited for clinical applications. We show that TISA performs better and more stably in medical detection and segmentation tasks for handheld device data. We further validate TISA as the clinical model for automatic measurements of spinal curvature and carotid intima-media thickness. The automatic measurements agree well with manual measurements made by human experts and the measurement errors remain within clinically acceptable ranges. We demonstrate the potential for TISA to facilitate automatic diagnosis on handheld ultrasound devices and expedite their eventual widespread use.
VertMatch: A Semi-supervised Framework for Vertebral Structure Detection in 3D Ultrasound Volume
Dec 28, 2022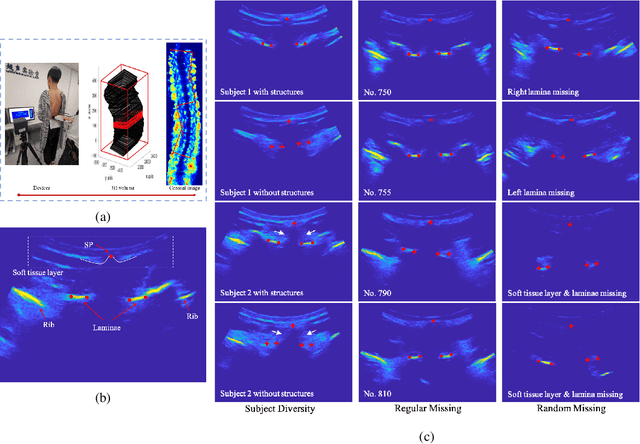
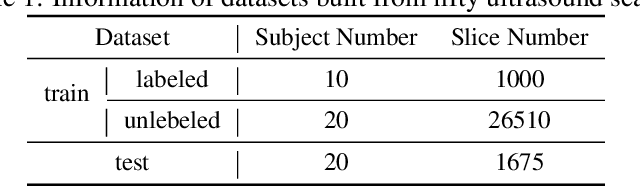
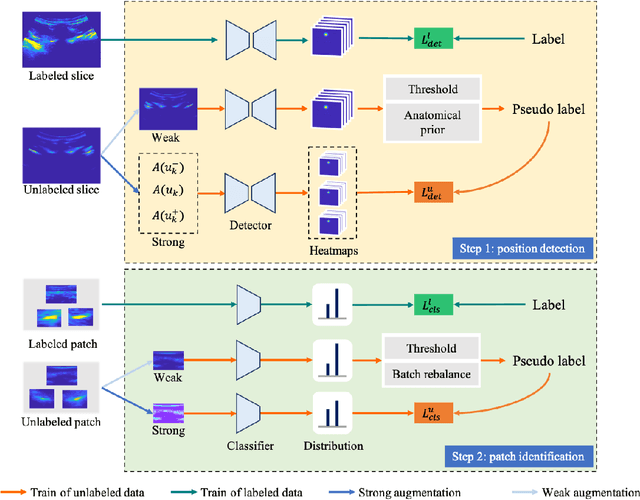
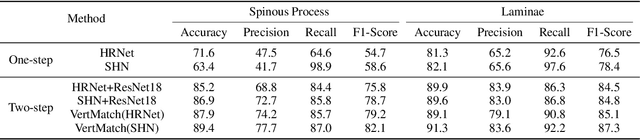
Three-dimensional (3D) ultrasound imaging technique has been applied for scoliosis assessment, but current assessment method only uses coronal projection image and cannot illustrate the 3D deformity and vertebra rotation. The vertebra detection is essential to reveal 3D spine information, but the detection task is challenging due to complex data and limited annotations. We propose VertMatch, a two-step framework to detect vertebral structures in 3D ultrasound volume by utilizing unlabeled data in semi-supervised manner. The first step is to detect the possible positions of structures on transverse slice globally, and then the local patches are cropped based on detected positions. The second step is to distinguish whether the patches contain real vertebral structures and screen the predicted positions from the first step. VertMatch develops three novel components for semi-supervised learning: for position detection in the first step, (1) anatomical prior is used to screen pseudo labels generated from confidence threshold method; (2) multi-slice consistency is used to utilize more unlabeled data by inputting multiple adjacent slices; (3) for patch identification in the second step, the categories are rebalanced in each batch to solve imbalance problem. Experimental results demonstrate that VertMatch can detect vertebra accurately in ultrasound volume and outperforms state-of-the-art methods. VertMatch is also validated in clinical application on forty ultrasound scans, and it can be a promising approach for 3D assessment of scoliosis.
A Tunably Compliant Origami Mechanism for Dynamically Dexterous Robots
Oct 29, 2019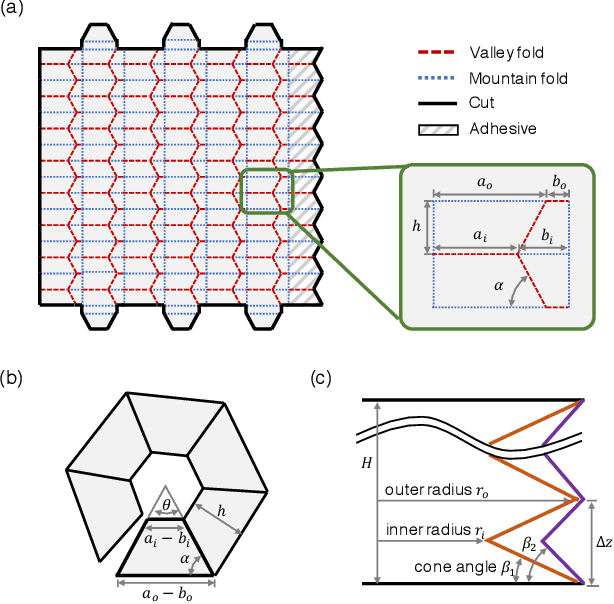
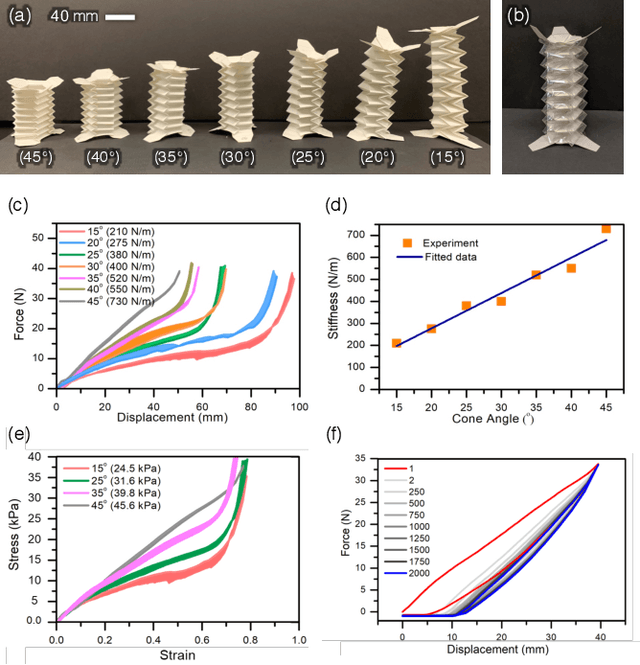
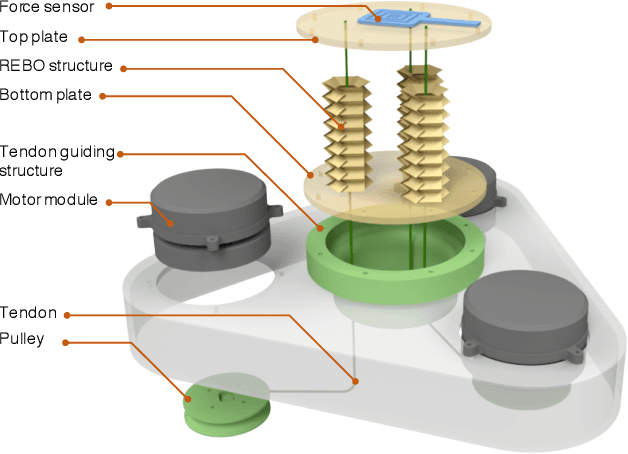
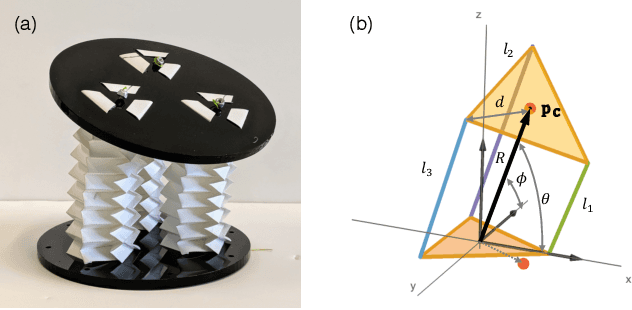
We present an approach to overcoming challenges in dynamical dexterity for robots through tunable origami structures. Our work leverages a one-parameter family of flat sheet crease patterns that folds into origami bellows, whose axial compliance can be tuned to select desired stiffness. Concentrically arranged cylinder pairs reliably manifest additive stiffness, extending the tunable range by nearly an order of magnitude and achieving bulk axial stiffness spanning 200-1500 N/m using 8 mil thick polyester-coated paper. Accordingly, we design origami energy-storing springs with a stiffness of 1035 N/m each and incorporate them into a three degree-of-freedom (DOF) tendon-driven spatial pointing mechanism that exhibits trajectory tracking accuracy less than 15% rms error within a ~2 cm^3 volume. The origami springs can sustain high power throughput, enabling the robot to achieve asymptotically stable juggling for both highly elastic (1~kg resilient shot put ball) and highly damped ("medicine ball") collisions in the vertical direction with apex heights approaching 10 cm. The results demonstrate that "soft" robotic mechanisms are able to perform a controlled, dynamically actuated task.