 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWiFi-Diffusion: Achieving Fine-Grained WiFi Radio Map Estimation With Ultra-Low Sampling Rate by Diffusion Models
Mar 15, 2025Fine-grained radio map presents communication parameters of interest, e.g., received signal strength, at every point across a large geographical region. It can be leveraged to improve the efficiency of spectrum utilization for a large area, particularly critical for the unlicensed WiFi spectrum. The problem of fine-grained radio map estimation is to utilize radio samples collected by sparsely distributed sensors to infer the map. This problem is challenging due to the ultra-low sampling rate, where the number of available samples is far less than the fine-grained resolution required for radio map estimation. We propose WiFi-Diffusion -- a novel generative framework for achieving fine-grained WiFi radio map estimation using diffusion models. WiFi-Diffusion employs the creative power of generative AI to address the ultra-low sampling rate challenge and consists of three blocks: 1) a boost block, using prior information such as the layout of obstacles to optimize the diffusion model; 2) a generation block, leveraging the diffusion model to generate a candidate set of radio maps; and 3) an election block, utilizing the radio propagation model as a guide to find the best radio map from the candidate set. Extensive simulations demonstrate that 1) the fine-grained radio map generated by WiFi-Diffusion is ten times better than those produced by state-of-the-art (SOTA) when they use the same ultra-low sampling rate; and 2) WiFi-Diffusion achieves comparable fine-grained radio map quality with only one-fifth of the sampling rate required by SOTA.
RoCoSDF: Row-Column Scanned Neural Signed Distance Fields for Freehand 3D Ultrasound Imaging Shape Reconstruction
Aug 14, 2024



The reconstruction of high-quality shape geometry is crucial for developing freehand 3D ultrasound imaging. However, the shape reconstruction of multi-view ultrasound data remains challenging due to the elevation distortion caused by thick transducer probes. In this paper, we present a novel learning-based framework RoCoSDF, which can effectively generate an implicit surface through continuous shape representations derived from row-column scanned datasets. In RoCoSDF, we encode the datasets from different views into the corresponding neural signed distance function (SDF) and then operate all SDFs in a normalized 3D space to restore the actual surface contour. Without requiring pre-training on large-scale ground truth shapes, our approach can synthesize a smooth and continuous signed distance field from multi-view SDFs to implicitly represent the actual geometry. Furthermore, two regularizers are introduced to facilitate shape refinement by constraining the SDF near the surface. The experiments on twelve shapes data acquired by two ultrasound transducer probes validate that RoCoSDF can effectively reconstruct accurate geometric shapes from multi-view ultrasound data, which outperforms current reconstruction methods. Code is available at https://github.com/chenhbo/RoCoSDF.
Large Models for Aerial Edges: An Edge-Cloud Model Evolution and Communication Paradigm
Aug 09, 2024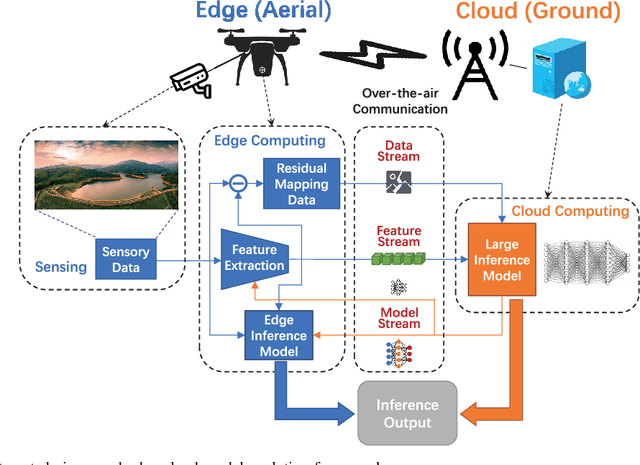
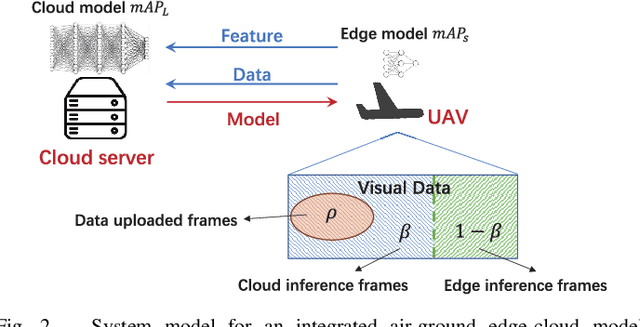
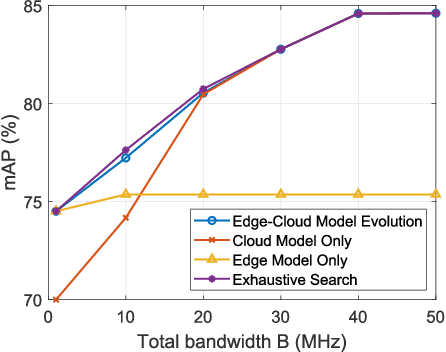
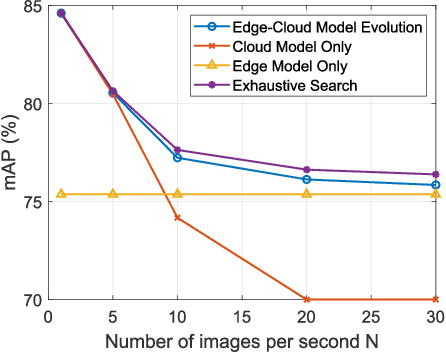
The future sixth-generation (6G) of wireless networks is expected to surpass its predecessors by offering ubiquitous coverage through integrated air-ground facility deployments in both communication and computing domains. In this network, aerial facilities, such as unmanned aerial vehicles (UAVs), conduct artificial intelligence (AI) computations based on multi-modal data to support diverse applications including surveillance and environment construction. However, these multi-domain inference and content generation tasks require large AI models, demanding powerful computing capabilities, thus posing significant challenges for UAVs. To tackle this problem, we propose an integrated edge-cloud model evolution framework, where UAVs serve as edge nodes for data collection and edge model computation. Through wireless channels, UAVs collaborate with ground cloud servers, providing cloud model computation and model updating for edge UAVs. With limited wireless communication bandwidth, the proposed framework faces the challenge of information exchange scheduling between the edge UAVs and the cloud server. To tackle this, we present joint task allocation, transmission resource allocation, transmission data quantization design, and edge model update design to enhance the inference accuracy of the integrated air-ground edge-cloud model evolution framework by mean average precision (mAP) maximization. A closed-form lower bound on the mAP of the proposed framework is derived, and the solution to the mAP maximization problem is optimized accordingly. Simulations, based on results from vision-based classification experiments, consistently demonstrate that the mAP of the proposed framework outperforms both a centralized cloud model framework and a distributed edge model framework across various communication bandwidths and data sizes.
Design and manufacture of edible microfluidic logic gates
Apr 05, 2023



Edible robotics is an emerging research field with potential use in environmental, food, and medical scenarios. In this context, the design of edible control circuits could increase the behavioral complexity of edible robots and reduce their dependence on inedible components. Here we describe a method to design and manufacture edible control circuits based on microfluidic logic gates. We focus on the choice of materials and fabrication procedure to produce edible logic gates based on recently available soft microfluidic logic. We validate the proposed design with the production of a functional NOT gate and suggest further research avenues for scaling up the method to more complex circuits.