 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and manufacture of edible microfluidic logic gates
Apr 05, 2023



Edible robotics is an emerging research field with potential use in environmental, food, and medical scenarios. In this context, the design of edible control circuits could increase the behavioral complexity of edible robots and reduce their dependence on inedible components. Here we describe a method to design and manufacture edible control circuits based on microfluidic logic gates. We focus on the choice of materials and fabrication procedure to produce edible logic gates based on recently available soft microfluidic logic. We validate the proposed design with the production of a functional NOT gate and suggest further research avenues for scaling up the method to more complex circuits.
Towards edible drones for rescue missions: design and flight of nutritional wings
Nov 08, 2022
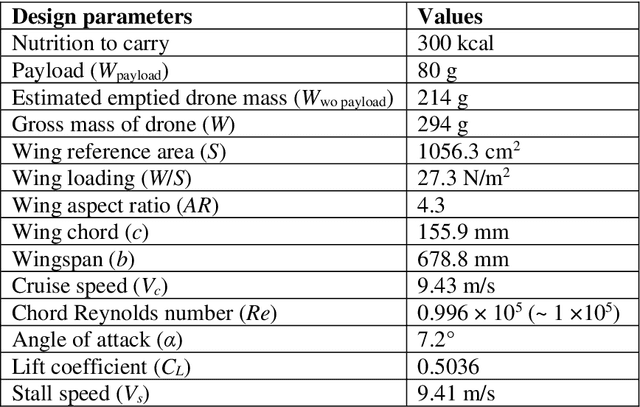

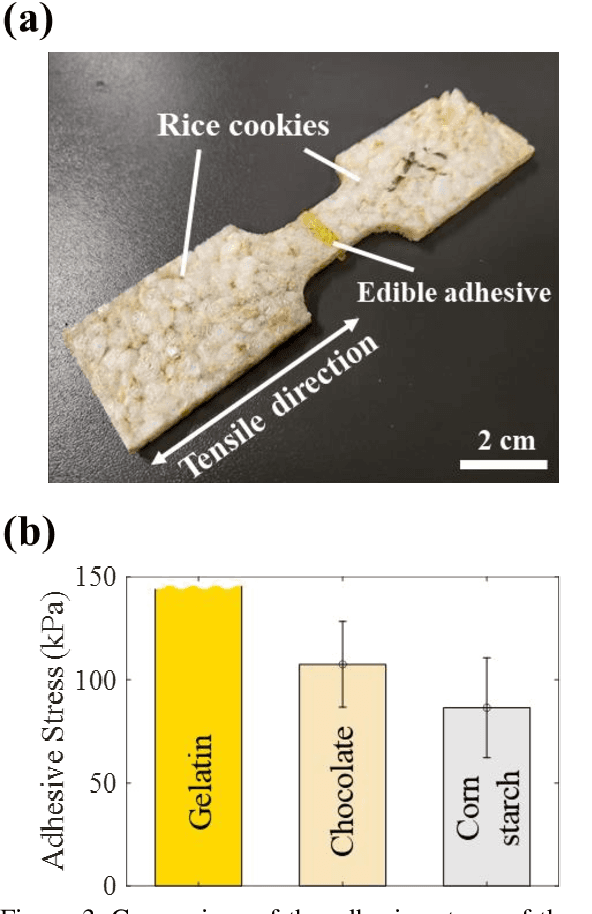
Drones have shown to be useful aerial vehicles for unmanned transport missions such as food and medical supply delivery. This can be leveraged to deliver life-saving nutrition and medicine for people in emergency situations. However, commercial drones can generally only carry 10 % - 30 % of their own mass as payload, which limits the amount of food delivery in a single flight. One novel solution to noticeably increase the food-carrying ratio of a drone, is recreating some structures of a drone, such as the wings, with edible materials. We thus propose a drone, which is no longer only a food transporting aircraft, but itself is partially edible, increasing its food-carrying mass ratio to 50 %, owing to its edible wings. Furthermore, should the edible drone be left behind in the environment after performing its task in an emergency situation, it will be more biodegradable than its non-edible counterpart, leaving less waste in the environment. Here we describe the choice of materials and scalable design of edible wings, and validate the method in a flight-capable prototype that can provide 300 kcal and carry a payload of 80 g of water.