 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlant robots
Jul 26, 2024


Plants display physical displacements during their growth due to photosynthesis, which converts light into chemical energy. This can be interpreted as plants acting as actuators with a built-in power source. This paper presents a method to create plant robots that move and perform tasks by harnessing the actuation output of plants: displacement and force generated from the growing process. As the target plant, radish sprouts are employed, and their displacement and force are characterized, followed by the calculation of power and energy densities. Based on the characterization, two different plant robots are designed and fabricated: a rotational robot and a gripper. The former demonstrates ground locomotion, achieving a travel distance of 14.6 mm with an average speed of 0.8 mm/h. The latter demonstrates the picking and placing of an object with a 0.1-g mass by the light-controlled open-close motion of plant fingers. A good agreement between the experimental and model values is observed in the specific data of the mobile robot, suggesting that obtaining the actuation characteristics of plants can enable the design and prediction of behavior in plant robots. These results pave the way for the realization of novel types of environmentally friendly and sustainable robots.
Towards edible drones for rescue missions: design and flight of nutritional wings
Nov 08, 2022
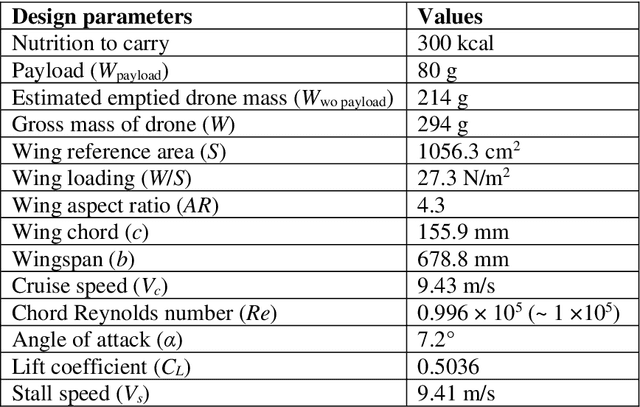

Drones have shown to be useful aerial vehicles for unmanned transport missions such as food and medical supply delivery. This can be leveraged to deliver life-saving nutrition and medicine for people in emergency situations. However, commercial drones can generally only carry 10 % - 30 % of their own mass as payload, which limits the amount of food delivery in a single flight. One novel solution to noticeably increase the food-carrying ratio of a drone, is recreating some structures of a drone, such as the wings, with edible materials. We thus propose a drone, which is no longer only a food transporting aircraft, but itself is partially edible, increasing its food-carrying mass ratio to 50 %, owing to its edible wings. Furthermore, should the edible drone be left behind in the environment after performing its task in an emergency situation, it will be more biodegradable than its non-edible counterpart, leaving less waste in the environment. Here we describe the choice of materials and scalable design of edible wings, and validate the method in a flight-capable prototype that can provide 300 kcal and carry a payload of 80 g of water.
Soft Pneumatic Gelatin Actuator for Edible Robotics
Mar 04, 2017
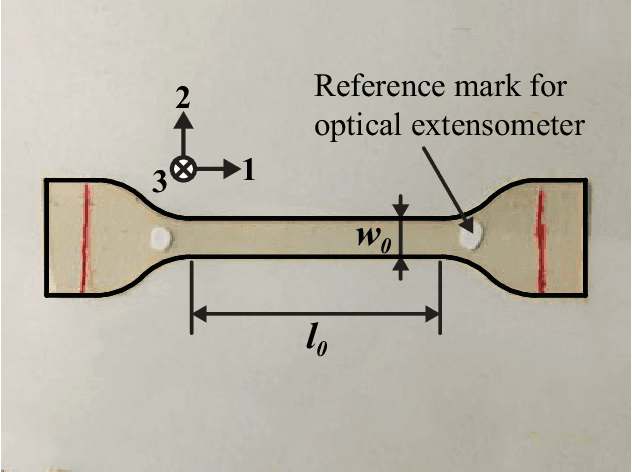

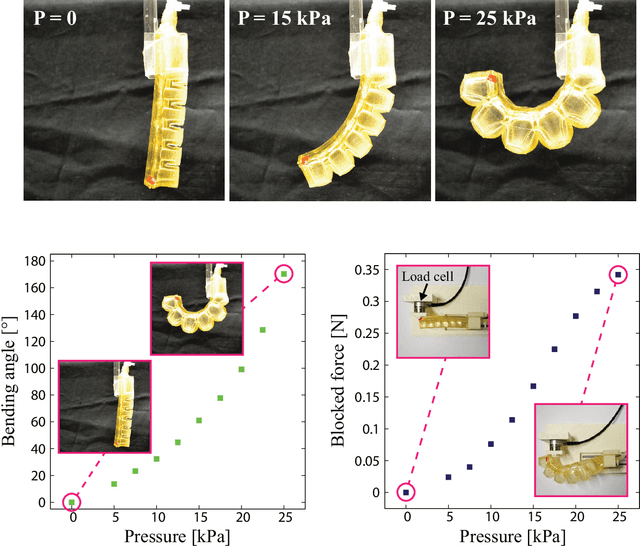
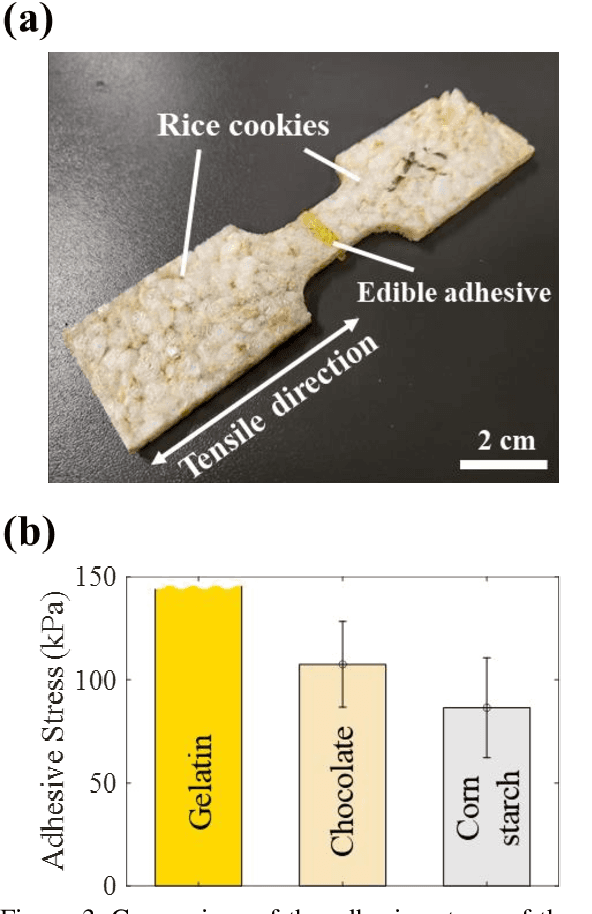
We present a fully edible pneumatic actuator based on gelatin-glycerol composite. The actuator is monolithic, fabricated via a molding process, and measures 90 mm in length, 20 mm in width, and 17 mm in thickness. Thanks to the composite mechanical characteristics similar to those of silicone elastomers, the actuator exhibits a bending angle of 170.3 {\deg} and a blocked force of 0.34 N at the applied pressure of 25 kPa. These values are comparable to elastomer based pneumatic actuators. As a validation example, two actuators are integrated to form a gripper capable of handling various objects, highlighting the high performance and applicability of the edible actuator. These edible actuators, combined with other recent edible materials and electronics, could lay the foundation for a new type of edible robots.
A Novel Propulsion Method of Flexible Underwater Robots
Nov 30, 2016
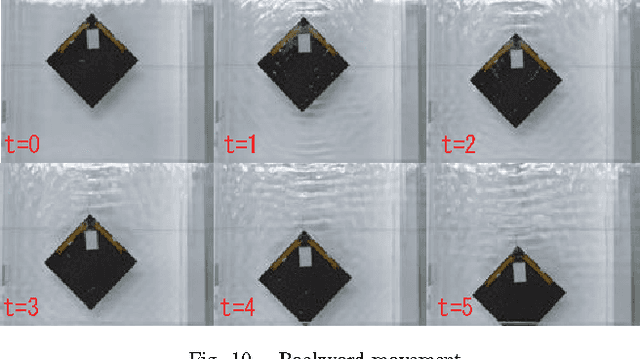
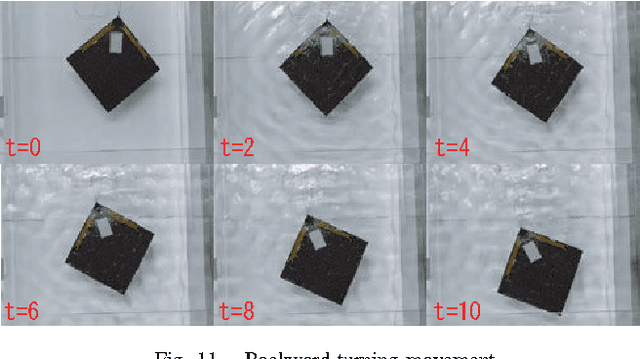
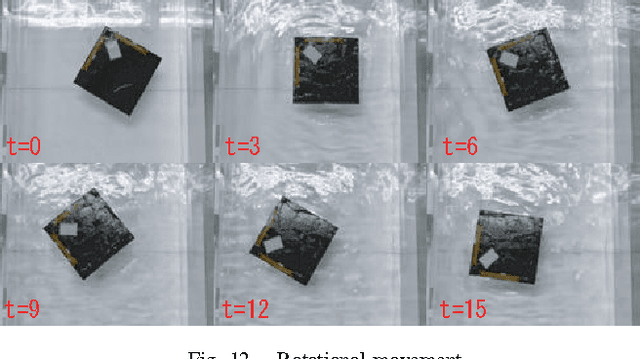
This paper presents aims at mobility improvement of flexible underwater robots. For this purpose, a novel propulsion method using planar structural vibration pattern is proposed, and tested on two kinds of prototypes. The result of experiments showed the possibility of the movements for multiple directions: forward, backward, turn, rotation, drift, and their combination. These movements are achieved by only one structure with two actuators. The results also indicated the possibility of driving using eigenmodes since movements were concentrated on low driving frequency area. To investigate the relation between movement and structural vibration pattern, we established a simulation model.