 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Pneumatic Gelatin Actuator for Edible Robotics
Paper and Code
Mar 04, 2017
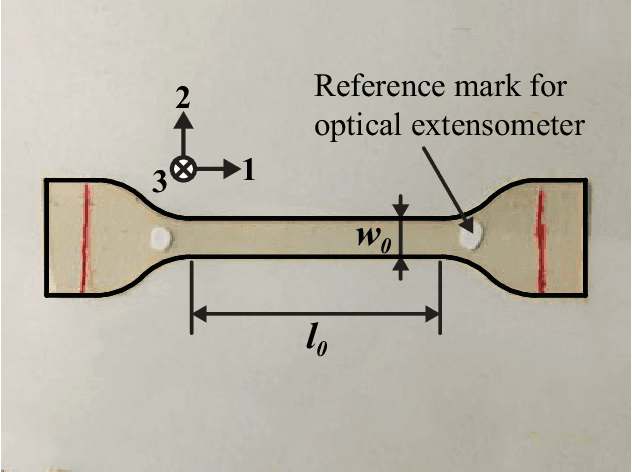

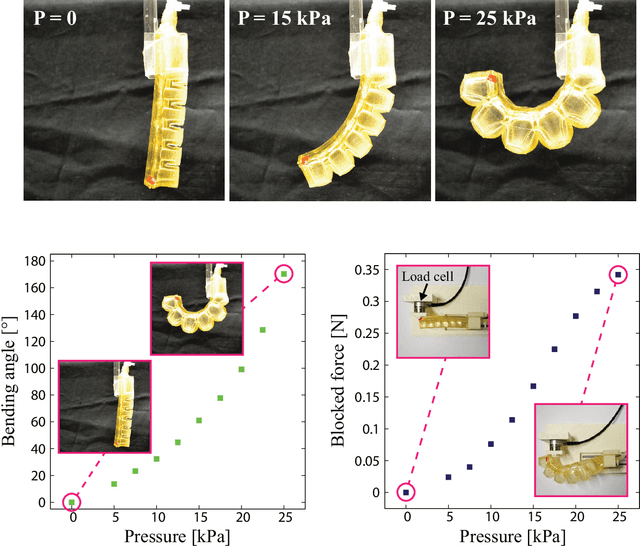
We present a fully edible pneumatic actuator based on gelatin-glycerol composite. The actuator is monolithic, fabricated via a molding process, and measures 90 mm in length, 20 mm in width, and 17 mm in thickness. Thanks to the composite mechanical characteristics similar to those of silicone elastomers, the actuator exhibits a bending angle of 170.3 {\deg} and a blocked force of 0.34 N at the applied pressure of 25 kPa. These values are comparable to elastomer based pneumatic actuators. As a validation example, two actuators are integrated to form a gripper capable of handling various objects, highlighting the high performance and applicability of the edible actuator. These edible actuators, combined with other recent edible materials and electronics, could lay the foundation for a new type of edible robots.