Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Propulsion Method of Flexible Underwater Robots
Nov 30, 2016
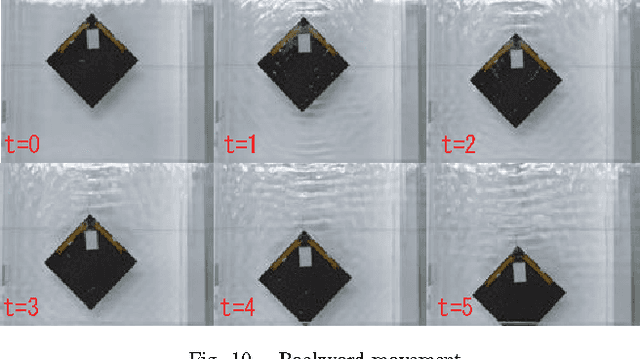
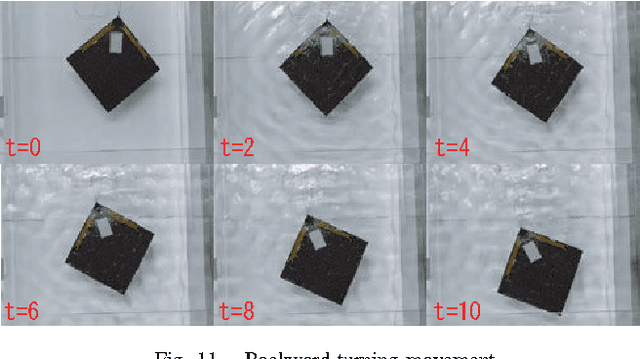
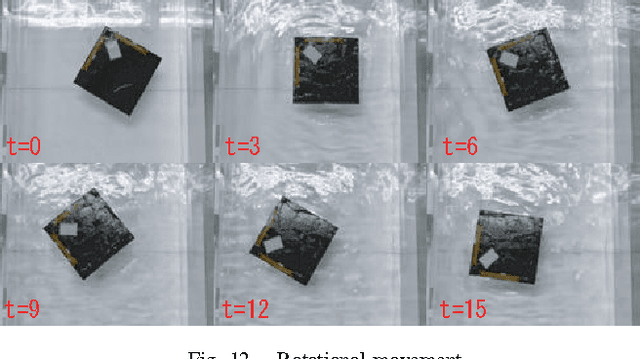
This paper presents aims at mobility improvement of flexible underwater robots. For this purpose, a novel propulsion method using planar structural vibration pattern is proposed, and tested on two kinds of prototypes. The result of experiments showed the possibility of the movements for multiple directions: forward, backward, turn, rotation, drift, and their combination. These movements are achieved by only one structure with two actuators. The results also indicated the possibility of driving using eigenmodes since movements were concentrated on low driving frequency area. To investigate the relation between movement and structural vibration pattern, we established a simulation model.
* 8 pages, 21 figures in 2011 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS)
Via