 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolving Programmatic Skill Networks
Jan 07, 2026We study continual skill acquisition in open-ended embodied environments where an agent must construct, refine, and reuse an expanding library of executable skills. We introduce the Programmatic Skill Network (PSN), a framework in which skills are executable symbolic programs forming a compositional network that evolves through experience. PSN defines three core mechanisms instantiated via large language models: (1)REFLECT for structured fault localization over skill compositions, (2) progressive optimization with maturity-aware update gating that stabilizes reliable skills while maintaining plasticity for uncertain ones, and (3) canonical structural refactoring under rollback validation that maintains network compactness. We further show that PSN's learning dynamics exhibit structural parallels to neural network training. Experiments on MineDojo and Crafter demonstrate robust skill reuse, rapid adaptation, and strong generalization across open-ended task distributions.\footnote{We plan to open-source the code.
Learning to Extract Context for Context-Aware LLM Inference
Dec 12, 2025User prompts to large language models (LLMs) are often ambiguous or under-specified, and subtle contextual cues shaped by user intentions, prior knowledge, and risk factors strongly influence what constitutes an appropriate response. Misinterpreting intent or risks may lead to unsafe outputs, while overly cautious interpretations can cause unnecessary refusal of benign requests. In this paper, we question the conventional framework in which LLMs generate immediate responses to requests without considering broader contextual factors. User requests are situated within broader contexts such as intentions, knowledge, and prior experience, which strongly influence what constitutes an appropriate answer. We propose a framework that extracts and leverages such contextual information from the user prompt itself. Specifically, a reinforcement learning based context generator, designed in an autoencoder-like fashion, is trained to infer contextual signals grounded in the prompt and use them to guide response generation. This approach is particularly important for safety tasks, where ambiguous requests may bypass safeguards while benign but confusing requests can trigger unnecessary refusals. Experiments show that our method reduces harmful responses by an average of 5.6% on the SafetyInstruct dataset across multiple foundation models and improves the harmonic mean of attack success rate and compliance on benign prompts by 6.2% on XSTest and WildJailbreak. These results demonstrate the effectiveness of context extraction for safer and more reliable LLM inferences.
Gistify! Codebase-Level Understanding via Runtime Execution
Oct 30, 2025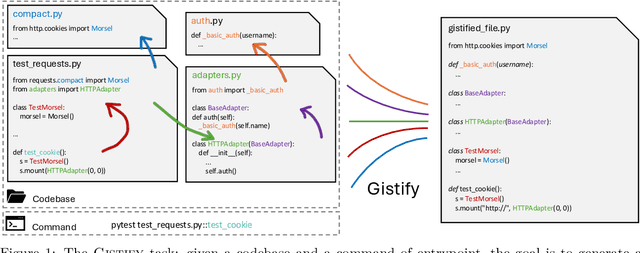
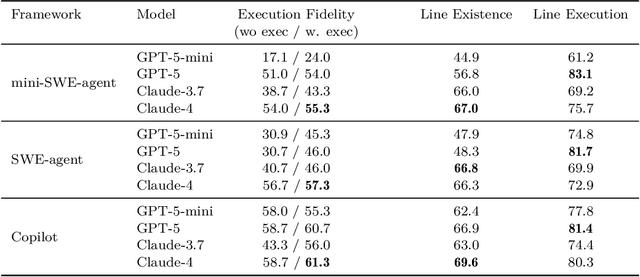

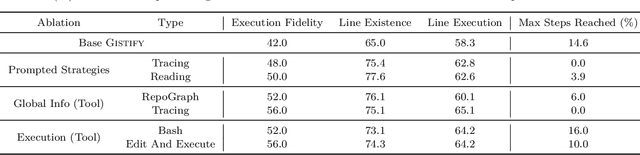
As coding agents are increasingly deployed in large codebases, the need to automatically design challenging, codebase-level evaluation is central. We propose Gistify, a task where a coding LLM must create a single, minimal, self-contained file that can reproduce a specific functionality of a codebase. The coding LLM is given full access to a codebase along with a specific entrypoint (e.g., a python command), and the generated file must replicate the output of the same command ran under the full codebase, while containing only the essential components necessary to execute the provided command. Success on Gistify requires both structural understanding of the codebase, accurate modeling of its execution flow as well as the ability to produce potentially large code patches. Our findings show that current state-of-the-art models struggle to reliably solve Gistify tasks, especially ones with long executions traces.
Llama See, Llama Do: A Mechanistic Perspective on Contextual Entrainment and Distraction in LLMs
May 14, 2025We observe a novel phenomenon, contextual entrainment, across a wide range of language models (LMs) and prompt settings, providing a new mechanistic perspective on how LMs become distracted by ``irrelevant'' contextual information in the input prompt. Specifically, LMs assign significantly higher logits (or probabilities) to any tokens that have previously appeared in the context prompt, even for random tokens. This suggests that contextual entrainment is a mechanistic phenomenon, occurring independently of the relevance or semantic relation of the tokens to the question or the rest of the sentence. We find statistically significant evidence that the magnitude of contextual entrainment is influenced by semantic factors. Counterfactual prompts have a greater effect compared to factual ones, suggesting that while contextual entrainment is a mechanistic phenomenon, it is modulated by semantic factors. We hypothesise that there is a circuit of attention heads -- the entrainment heads -- that corresponds to the contextual entrainment phenomenon. Using a novel entrainment head discovery method based on differentiable masking, we identify these heads across various settings. When we ``turn off'' these heads, i.e., set their outputs to zero, the effect of contextual entrainment is significantly attenuated, causing the model to generate output that capitulates to what it would produce if no distracting context were provided. Our discovery of contextual entrainment, along with our investigation into LM distraction via the entrainment heads, marks a key step towards the mechanistic analysis and mitigation of the distraction problem.
TALES: Text Adventure Learning Environment Suite
Apr 22, 2025Reasoning is an essential skill to enable Large Language Models (LLMs) to interact with the world. As tasks become more complex, they demand increasingly sophisticated and diverse reasoning capabilities for sequential decision-making, requiring structured reasoning over the context history to determine the next best action. We introduce TALES, a diverse collection of synthetic and human-written text-adventure games designed to challenge and evaluate diverse reasoning capabilities. We present results over a range of LLMs, open- and closed-weights, performing a qualitative analysis on the top performing models. Despite an impressive showing on synthetic games, even the top LLM-driven agents fail to achieve 15% on games designed for human enjoyment. Code and visualization of the experiments can be found at https://microsoft.github.io/tales.
debug-gym: A Text-Based Environment for Interactive Debugging
Mar 27, 2025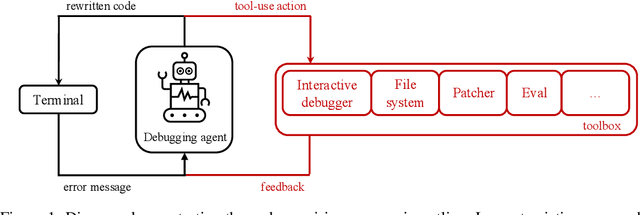
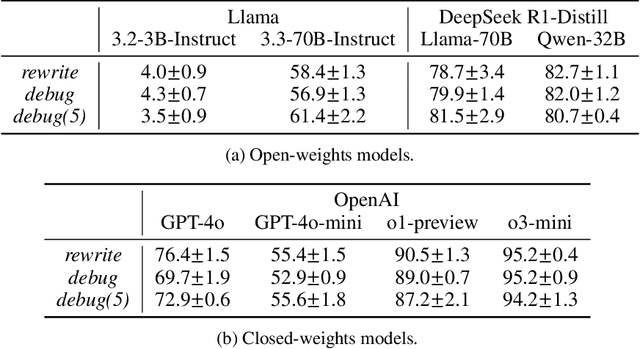
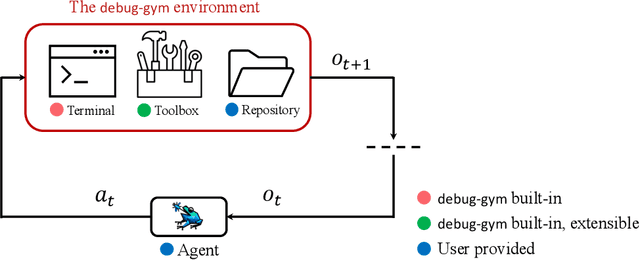
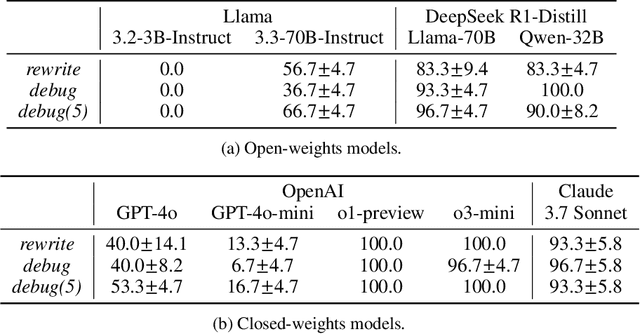
Large Language Models (LLMs) are increasingly relied upon for coding tasks, yet in most scenarios it is assumed that all relevant information can be either accessed in context or matches their training data. We posit that LLMs can benefit from the ability to interactively explore a codebase to gather the information relevant to their task. To achieve this, we present a textual environment, namely debug-gym, for developing LLM-based agents in an interactive coding setting. Our environment is lightweight and provides a preset of useful tools, such as a Python debugger (pdb), designed to facilitate an LLM-based agent's interactive debugging. Beyond coding and debugging tasks, this approach can be generalized to other tasks that would benefit from information-seeking behavior by an LLM agent.
Enhancing Agent Learning through World Dynamics Modeling
Jul 25, 2024While large language models (LLMs) have been increasingly deployed across tasks in language understanding and interactive decision-making, their impressive performance is largely due to the comprehensive and in-depth domain knowledge embedded within them. However, the extent of this knowledge can vary across different domains. Existing methods often assume that LLMs already possess such comprehensive and in-depth knowledge of their environment, overlooking potential gaps in their understanding of actual world dynamics. To address this gap, we introduce Discover, Verify, and Evolve (DiVE), a framework that discovers world dynamics from a small number of demonstrations, verifies the correctness of these dynamics, and evolves new, advanced dynamics tailored to the current situation. Through extensive evaluations, we analyze the impact of each component on performance and compare the automatically generated dynamics from DiVE with human-annotated world dynamics. Our results demonstrate that LLMs guided by DiVE can make better decisions, achieving rewards comparable to human players in the Crafter environment.
Can Language Models Serve as Text-Based World Simulators?
Jun 10, 2024



Virtual environments play a key role in benchmarking advances in complex planning and decision-making tasks but are expensive and complicated to build by hand. Can current language models themselves serve as world simulators, correctly predicting how actions change different world states, thus bypassing the need for extensive manual coding? Our goal is to answer this question in the context of text-based simulators. Our approach is to build and use a new benchmark, called ByteSized32-State-Prediction, containing a dataset of text game state transitions and accompanying game tasks. We use this to directly quantify, for the first time, how well LLMs can serve as text-based world simulators. We test GPT-4 on this dataset and find that, despite its impressive performance, it is still an unreliable world simulator without further innovations. This work thus contributes both new insights into current LLM's capabilities and weaknesses, as well as a novel benchmark to track future progress as new models appear.
OPEx: A Component-Wise Analysis of LLM-Centric Agents in Embodied Instruction Following
Mar 05, 2024



Embodied Instruction Following (EIF) is a crucial task in embodied learning, requiring agents to interact with their environment through egocentric observations to fulfill natural language instructions. Recent advancements have seen a surge in employing large language models (LLMs) within a framework-centric approach to enhance performance in embodied learning tasks, including EIF. Despite these efforts, there exists a lack of a unified understanding regarding the impact of various components-ranging from visual perception to action execution-on task performance. To address this gap, we introduce OPEx, a comprehensive framework that delineates the core components essential for solving embodied learning tasks: Observer, Planner, and Executor. Through extensive evaluations, we provide a deep analysis of how each component influences EIF task performance. Furthermore, we innovate within this space by deploying a multi-agent dialogue strategy on a TextWorld counterpart, further enhancing task performance. Our findings reveal that LLM-centric design markedly improves EIF outcomes, identify visual perception and low-level action execution as critical bottlenecks, and demonstrate that augmenting LLMs with a multi-agent framework further elevates performance.
Language-guided Skill Learning with Temporal Variational Inference
Feb 26, 2024



We present an algorithm for skill discovery from expert demonstrations. The algorithm first utilizes Large Language Models (LLMs) to propose an initial segmentation of the trajectories. Following that, a hierarchical variational inference framework incorporates the LLM-generated segmentation information to discover reusable skills by merging trajectory segments. To further control the trade-off between compression and reusability, we introduce a novel auxiliary objective based on the Minimum Description Length principle that helps guide this skill discovery process. Our results demonstrate that agents equipped with our method are able to discover skills that help accelerate learning and outperform baseline skill learning approaches on new long-horizon tasks in BabyAI, a grid world navigation environment, as well as ALFRED, a household simulation environment.