 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Unobserved Confounders: A Kernelized Regression Approach
Jan 01, 2026Detecting unobserved confounders is crucial for reliable causal inference in observational studies. Existing methods require either linearity assumptions or multiple heterogeneous environments, limiting applicability to nonlinear single-environment settings. To bridge this gap, we propose Kernel Regression Confounder Detection (KRCD), a novel method for detecting unobserved confounding in nonlinear observational data under single-environment conditions. KRCD leverages reproducing kernel Hilbert spaces to model complex dependencies. By comparing standard and higherorder kernel regressions, we derive a test statistic whose significant deviation from zero indicates unobserved confounding. Theoretically, we prove two key results: First, in infinite samples, regression coefficients coincide if and only if no unobserved confounders exist. Second, finite-sample differences converge to zero-mean Gaussian distributions with tractable variance. Extensive experiments on synthetic benchmarks and the Twins dataset demonstrate that KRCD not only outperforms existing baselines but also achieves superior computational efficiency.
BeyondFacial: Identity-Preserving Personalized Generation Beyond Facial Close-ups
Nov 15, 2025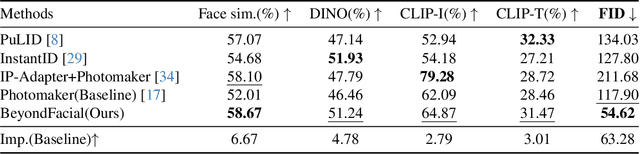
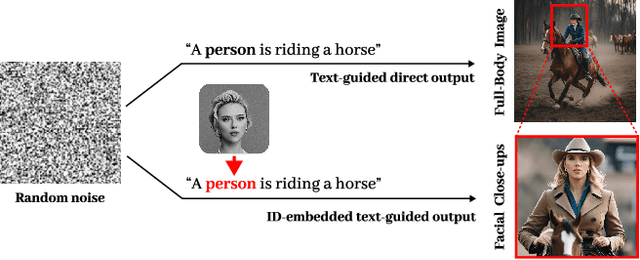
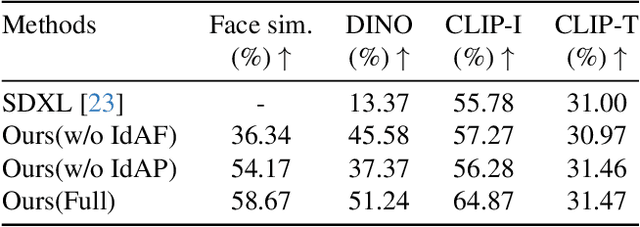
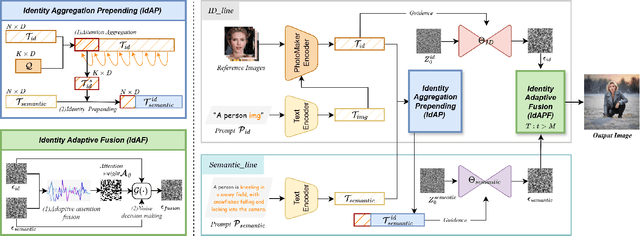
Identity-Preserving Personalized Generation (IPPG) has advanced film production and artistic creation, yet existing approaches overemphasize facial regions, resulting in outputs dominated by facial close-ups.These methods suffer from weak visual narrativity and poor semantic consistency under complex text prompts, with the core limitation rooted in identity (ID) feature embeddings undermining the semantic expressiveness of generative models. To address these issues, this paper presents an IPPG method that breaks the constraint of facial close-ups, achieving synergistic optimization of identity fidelity and scene semantic creation. Specifically, we design a Dual-Line Inference (DLI) pipeline with identity-semantic separation, resolving the representation conflict between ID and semantics inherent in traditional single-path architectures. Further, we propose an Identity Adaptive Fusion (IdAF) strategy that defers ID-semantic fusion to the noise prediction stage, integrating adaptive attention fusion and noise decision masking to avoid ID embedding interference on semantics without manual masking. Finally, an Identity Aggregation Prepending (IdAP) module is introduced to aggregate ID information and replace random initializations, further enhancing identity preservation. Experimental results validate that our method achieves stable and effective performance in IPPG tasks beyond facial close-ups, enabling efficient generation without manual masking or fine-tuning. As a plug-and-play component, it can be rapidly deployed in existing IPPG frameworks, addressing the over-reliance on facial close-ups, facilitating film-level character-scene creation, and providing richer personalized generation capabilities for related domains.
Breaking the Gradient Barrier: Unveiling Large Language Models for Strategic Classification
Nov 10, 2025Strategic classification~(SC) explores how individuals or entities modify their features strategically to achieve favorable classification outcomes. However, existing SC methods, which are largely based on linear models or shallow neural networks, face significant limitations in terms of scalability and capacity when applied to real-world datasets with significantly increasing scale, especially in financial services and the internet sector. In this paper, we investigate how to leverage large language models to design a more scalable and efficient SC framework, especially in the case of growing individuals engaged with decision-making processes. Specifically, we introduce GLIM, a gradient-free SC method grounded in in-context learning. During the feed-forward process of self-attention, GLIM implicitly simulates the typical bi-level optimization process of SC, including both the feature manipulation and decision rule optimization. Without fine-tuning the LLMs, our proposed GLIM enjoys the advantage of cost-effective adaptation in dynamic strategic environments. Theoretically, we prove GLIM can support pre-trained LLMs to adapt to a broad range of strategic manipulations. We validate our approach through experiments with a collection of pre-trained LLMs on real-world and synthetic datasets in financial and internet domains, demonstrating that our GLIM exhibits both robustness and efficiency, and offering an effective solution for large-scale SC tasks.
ClusterUCB: Efficient Gradient-Based Data Selection for Targeted Fine-Tuning of LLMs
Jun 12, 2025Gradient-based data influence approximation has been leveraged to select useful data samples in the supervised fine-tuning of large language models. However, the computation of gradients throughout the fine-tuning process requires too many resources to be feasible in practice. In this paper, we propose an efficient gradient-based data selection framework with clustering and a modified Upper Confidence Bound (UCB) algorithm. Based on the intuition that data samples with similar gradient features will have similar influences, we first perform clustering on the training data pool. Then, we frame the inter-cluster data selection as a constrained computing budget allocation problem and consider it a multi-armed bandit problem. A modified UCB algorithm is leveraged to solve this problem. Specifically, during the iterative sampling process, historical data influence information is recorded to directly estimate the distributions of each cluster, and a cold start is adopted to balance exploration and exploitation. Experimental results on various benchmarks show that our proposed framework, ClusterUCB, can achieve comparable results to the original gradient-based data selection methods while greatly reducing computing consumption.
OmniEarth-Bench: Towards Holistic Evaluation of Earth's Six Spheres and Cross-Spheres Interactions with Multimodal Observational Earth Data
May 29, 2025Existing benchmarks for Earth science multimodal learning exhibit critical limitations in systematic coverage of geosystem components and cross-sphere interactions, often constrained to isolated subsystems (only in Human-activities sphere or atmosphere) with limited evaluation dimensions (less than 16 tasks). To address these gaps, we introduce OmniEarth-Bench, the first comprehensive multimodal benchmark spanning all six Earth science spheres (atmosphere, lithosphere, Oceansphere, cryosphere, biosphere and Human-activities sphere) and cross-spheres with one hundred expert-curated evaluation dimensions. Leveraging observational data from satellite sensors and in-situ measurements, OmniEarth-Bench integrates 29,779 annotations across four tiers: perception, general reasoning, scientific knowledge reasoning and chain-of-thought (CoT) reasoning. This involves the efforts of 2-5 experts per sphere to establish authoritative evaluation dimensions and curate relevant observational datasets, 40 crowd-sourcing annotators to assist experts for annotations, and finally, OmniEarth-Bench is validated via hybrid expert-crowd workflows to reduce label ambiguity. Experiments on 9 state-of-the-art MLLMs reveal that even the most advanced models struggle with our benchmarks, where none of them reach 35\% accuracy. Especially, in some cross-spheres tasks, the performance of leading models like GPT-4o drops to 0.0\%. OmniEarth-Bench sets a new standard for geosystem-aware AI, advancing both scientific discovery and practical applications in environmental monitoring and disaster prediction. The dataset, source code, and trained models were released.
GeoLLaVA-8K: Scaling Remote-Sensing Multimodal Large Language Models to 8K Resolution
May 27, 2025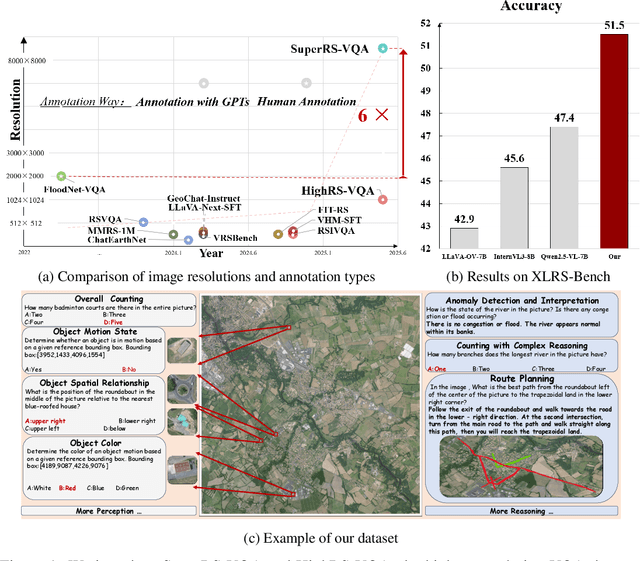
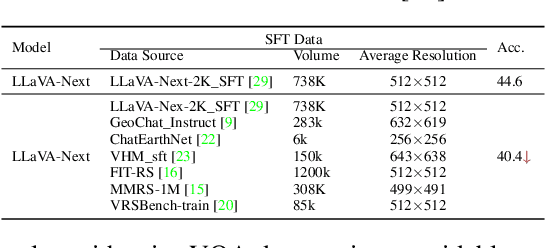
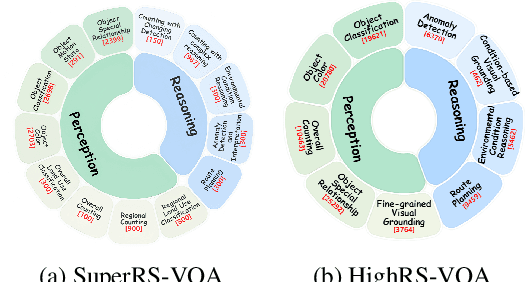
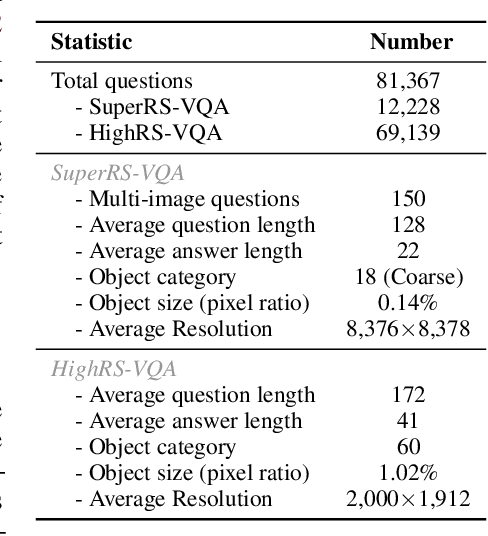
Ultra-high-resolution (UHR) remote sensing (RS) imagery offers valuable data for Earth observation but pose challenges for existing multimodal foundation models due to two key bottlenecks: (1) limited availability of UHR training data, and (2) token explosion caused by the large image size. To address data scarcity, we introduce SuperRS-VQA (avg. 8,376$\times$8,376) and HighRS-VQA (avg. 2,000$\times$1,912), the highest-resolution vision-language datasets in RS to date, covering 22 real-world dialogue tasks. To mitigate token explosion, our pilot studies reveal significant redundancy in RS images: crucial information is concentrated in a small subset of object-centric tokens, while pruning background tokens (e.g., ocean or forest) can even improve performance. Motivated by these findings, we propose two strategies: Background Token Pruning and Anchored Token Selection, to reduce the memory footprint while preserving key semantics.Integrating these techniques, we introduce GeoLLaVA-8K, the first RS-focused multimodal large language model capable of handling inputs up to 8K$\times$8K resolution, built on the LLaVA framework. Trained on SuperRS-VQA and HighRS-VQA, GeoLLaVA-8K sets a new state-of-the-art on the XLRS-Bench.
MME-VideoOCR: Evaluating OCR-Based Capabilities of Multimodal LLMs in Video Scenarios
May 27, 2025Multimodal Large Language Models (MLLMs) have achieved considerable accuracy in Optical Character Recognition (OCR) from static images. However, their efficacy in video OCR is significantly diminished due to factors such as motion blur, temporal variations, and visual effects inherent in video content. To provide clearer guidance for training practical MLLMs, we introduce the MME-VideoOCR benchmark, which encompasses a comprehensive range of video OCR application scenarios. MME-VideoOCR features 10 task categories comprising 25 individual tasks and spans 44 diverse scenarios. These tasks extend beyond text recognition to incorporate deeper comprehension and reasoning of textual content within videos. The benchmark consists of 1,464 videos with varying resolutions, aspect ratios, and durations, along with 2,000 meticulously curated, manually annotated question-answer pairs. We evaluate 18 state-of-the-art MLLMs on MME-VideoOCR, revealing that even the best-performing model (Gemini-2.5 Pro) achieves an accuracy of only 73.7%. Fine-grained analysis indicates that while existing MLLMs demonstrate strong performance on tasks where relevant texts are contained within a single or few frames, they exhibit limited capability in effectively handling tasks that demand holistic video comprehension. These limitations are especially evident in scenarios that require spatio-temporal reasoning, cross-frame information integration, or resistance to language prior bias. Our findings also highlight the importance of high-resolution visual input and sufficient temporal coverage for reliable OCR in dynamic video scenarios.
Mavors: Multi-granularity Video Representation for Multimodal Large Language Model
Apr 14, 2025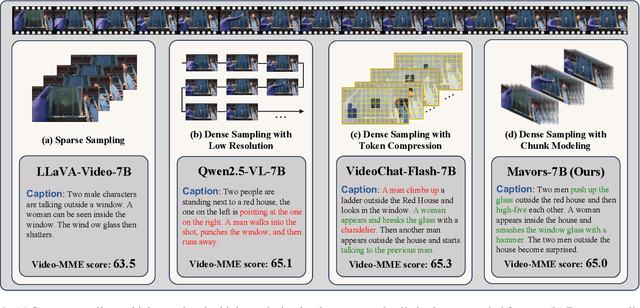
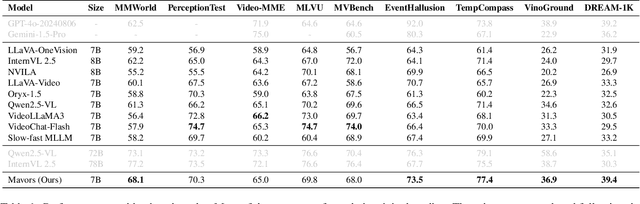
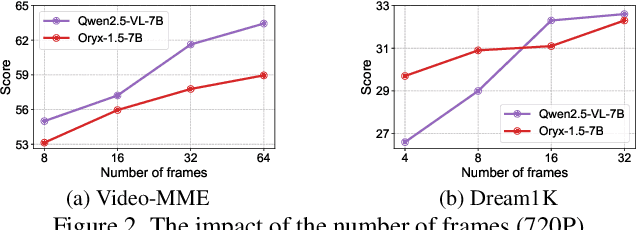
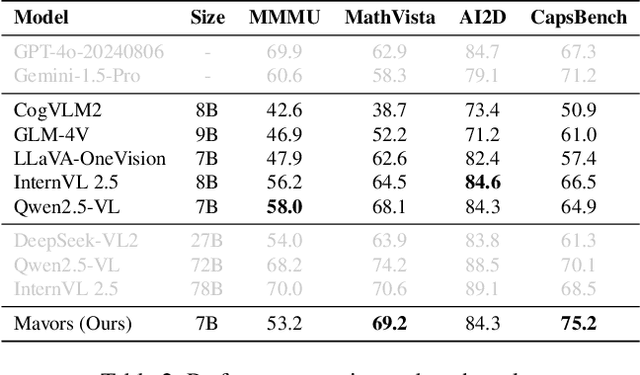
Long-context video understanding in multimodal large language models (MLLMs) faces a critical challenge: balancing computational efficiency with the retention of fine-grained spatio-temporal patterns. Existing approaches (e.g., sparse sampling, dense sampling with low resolution, and token compression) suffer from significant information loss in temporal dynamics, spatial details, or subtle interactions, particularly in videos with complex motion or varying resolutions. To address this, we propose $\mathbf{Mavors}$, a novel framework that introduces $\mathbf{M}$ulti-gr$\mathbf{a}$nularity $\mathbf{v}$ide$\mathbf{o}$ $\mathbf{r}$epre$\mathbf{s}$entation for holistic long-video modeling. Specifically, Mavors directly encodes raw video content into latent representations through two core components: 1) an Intra-chunk Vision Encoder (IVE) that preserves high-resolution spatial features via 3D convolutions and Vision Transformers, and 2) an Inter-chunk Feature Aggregator (IFA) that establishes temporal coherence across chunks using transformer-based dependency modeling with chunk-level rotary position encodings. Moreover, the framework unifies image and video understanding by treating images as single-frame videos via sub-image decomposition. Experiments across diverse benchmarks demonstrate Mavors' superiority in maintaining both spatial fidelity and temporal continuity, significantly outperforming existing methods in tasks requiring fine-grained spatio-temporal reasoning.
XLRS-Bench: Could Your Multimodal LLMs Understand Extremely Large Ultra-High-Resolution Remote Sensing Imagery?
Mar 31, 2025The astonishing breakthrough of multimodal large language models (MLLMs) has necessitated new benchmarks to quantitatively assess their capabilities, reveal their limitations, and indicate future research directions. However, this is challenging in the context of remote sensing (RS), since the imagery features ultra-high resolution that incorporates extremely complex semantic relationships. Existing benchmarks usually adopt notably smaller image sizes than real-world RS scenarios, suffer from limited annotation quality, and consider insufficient dimensions of evaluation. To address these issues, we present XLRS-Bench: a comprehensive benchmark for evaluating the perception and reasoning capabilities of MLLMs in ultra-high-resolution RS scenarios. XLRS-Bench boasts the largest average image size (8500$\times$8500) observed thus far, with all evaluation samples meticulously annotated manually, assisted by a novel semi-automatic captioner on ultra-high-resolution RS images. On top of the XLRS-Bench, 16 sub-tasks are defined to evaluate MLLMs' 10 kinds of perceptual capabilities and 6 kinds of reasoning capabilities, with a primary emphasis on advanced cognitive processes that facilitate real-world decision-making and the capture of spatiotemporal changes. The results of both general and RS-focused MLLMs on XLRS-Bench indicate that further efforts are needed for real-world RS applications. We have open-sourced XLRS-Bench to support further research in developing more powerful MLLMs for remote sensing.
Attribute-formed Class-specific Concept Space: Endowing Language Bottleneck Model with Better Interpretability and Scalability
Mar 26, 2025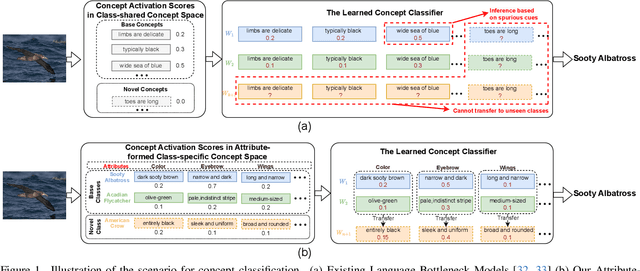

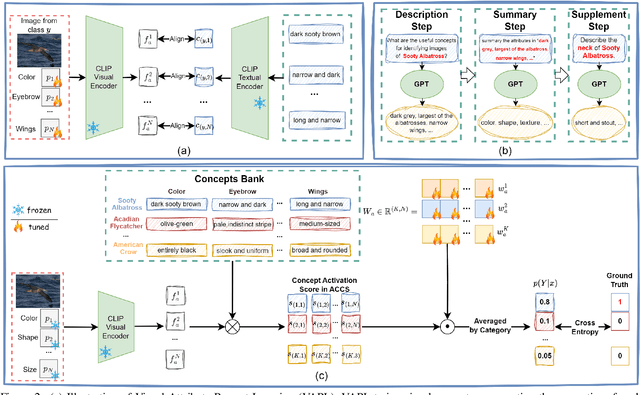

Language Bottleneck Models (LBMs) are proposed to achieve interpretable image recognition by classifying images based on textual concept bottlenecks. However, current LBMs simply list all concepts together as the bottleneck layer, leading to the spurious cue inference problem and cannot generalized to unseen classes. To address these limitations, we propose the Attribute-formed Language Bottleneck Model (ALBM). ALBM organizes concepts in the attribute-formed class-specific space, where concepts are descriptions of specific attributes for specific classes. In this way, ALBM can avoid the spurious cue inference problem by classifying solely based on the essential concepts of each class. In addition, the cross-class unified attribute set also ensures that the concept spaces of different classes have strong correlations, as a result, the learned concept classifier can be easily generalized to unseen classes. Moreover, to further improve interpretability, we propose Visual Attribute Prompt Learning (VAPL) to extract visual features on fine-grained attributes. Furthermore, to avoid labor-intensive concept annotation, we propose the Description, Summary, and Supplement (DSS) strategy to automatically generate high-quality concept sets with a complete and precise attribute. Extensive experiments on 9 widely used few-shot benchmarks demonstrate the interpretability, transferability, and performance of our approach. The code and collected concept sets are available at https://github.com/tiggers23/ALBM.