 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystem Design for Maintaining Internal State Consistency in Long-Horizon Robotic Tabletop Games
Mar 26, 2026Long-horizon tabletop games pose a distinct systems challenge for robotics: small perceptual or execution errors can invalidate accumulated task state, propagate across decision-making modules, and ultimately derail interaction. This paper studies how to maintain internal state consistency in turn-based, multi-human robotic tabletop games through deliberate system design rather than isolated component improvement. Using Mahjong as a representative long-horizon setting, we present an integrated architecture that explicitly maintains perceptual, execution, and interaction state, partitions high-level semantic reasoning from time-critical perception and control, and incorporates verified action primitives with tactile-triggered recovery to prevent premature state corruption. We further introduce interaction-level monitoring mechanisms to detect turn violations and hidden-information breaches that threaten execution assumptions. Beyond demonstrating complete-game operation, we provide an empirical characterization of failure modes, recovery effectiveness, cross-module error propagation, and hardware-algorithm trade-offs observed during deployment. Our results show that explicit partitioning, monitored state transitions, and recovery mechanisms are critical for sustaining executable consistency over extended play, whereas monolithic or unverified pipelines lead to measurable degradation in end-to-end reliability. The proposed system serves as an empirical platform for studying system-level design principles in long-horizon, turn-based interaction.
Stephanie2: Thinking, Waiting, and Making Decisions Like Humans in Step-by-Step AI Social Chat
Jan 09, 2026Instant-messaging human social chat typically progresses through a sequence of short messages. Existing step-by-step AI chatting systems typically split a one-shot generation into multiple messages and send them sequentially, but they lack an active waiting mechanism and exhibit unnatural message pacing. In order to address these issues, we propose Stephanie2, a novel next-generation step-wise decision-making dialogue agent. With active waiting and message-pace adaptation, Stephanie2 explicitly decides at each step whether to send or wait, and models latency as the sum of thinking time and typing time to achieve more natural pacing. We further introduce a time-window-based dual-agent dialogue system to generate pseudo dialogue histories for human and automatic evaluations. Experiments show that Stephanie2 clearly outperforms Stephanie1 on metrics such as naturalness and engagement, and achieves a higher pass rate on human evaluation with the role identification Turing test.
Reshaping MOFs Text Mining with a Dynamic Multi-Agent Framework of Large Language Agents
Apr 26, 2025The mining of synthesis conditions for metal-organic frameworks (MOFs) is a significant focus in materials science. However, identifying the precise synthesis conditions for specific MOFs within the vast array of possibilities presents a considerable challenge. Large Language Models (LLMs) offer a promising solution to this problem. We leveraged the capabilities of LLMs, specifically gpt-4o-mini, as core agents to integrate various MOF-related agents, including synthesis, attribute, and chemical information agents. This integration culminated in the development of MOFh6, an LLM tool designed to streamline the MOF synthesis process. MOFh6 allows users to query in multiple formats, such as submitting scientific literature, or inquiring about specific MOF codes or structural properties. The tool analyzes these queries to provide optimal synthesis conditions and generates model files for density functional theory pre modeling. We believe MOFh6 will enhance efficiency in the MOF synthesis of all researchers.
PathVLM-R1: A Reinforcement Learning-Driven Reasoning Model for Pathology Visual-Language Tasks
Apr 12, 2025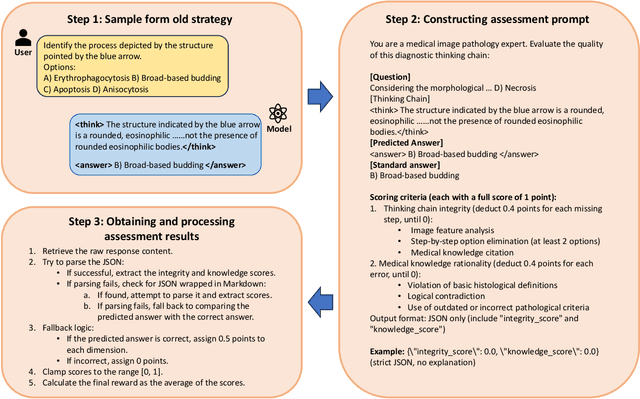
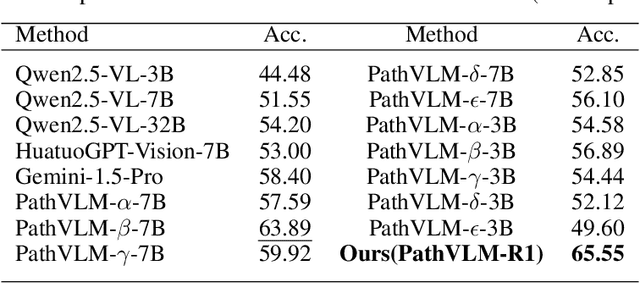
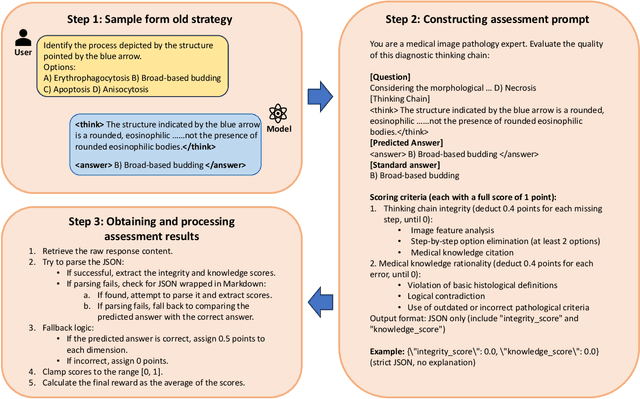
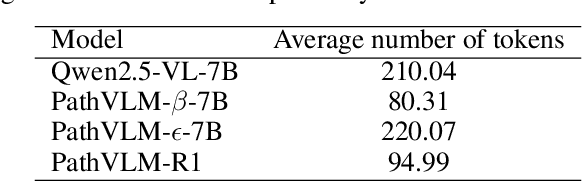
The diagnosis of pathological images is often limited by expert availability and regional disparities, highlighting the importance of automated diagnosis using Vision-Language Models (VLMs). Traditional multimodal models typically emphasize outcomes over the reasoning process, compromising the reliability of clinical decisions. To address the weak reasoning abilities and lack of supervised processes in pathological VLMs, we have innovatively proposed PathVLM-R1, a visual language model designed specifically for pathological images. We have based our model on Qwen2.5-VL-7B-Instruct and enhanced its performance for pathological tasks through meticulously designed post-training strategies. Firstly, we conduct supervised fine-tuning guided by pathological data to imbue the model with foundational pathological knowledge, forming a new pathological base model. Subsequently, we introduce Group Relative Policy Optimization (GRPO) and propose a dual reward-driven reinforcement learning optimization, ensuring strict constraint on logical supervision of the reasoning process and accuracy of results via cross-modal process reward and outcome accuracy reward. In the pathological image question-answering tasks, the testing results of PathVLM-R1 demonstrate a 14% improvement in accuracy compared to baseline methods, and it demonstrated superior performance compared to the Qwen2.5-VL-32B version despite having a significantly smaller parameter size. Furthermore, in out-domain data evaluation involving four medical imaging modalities: Computed Tomography (CT), dermoscopy, fundus photography, and Optical Coherence Tomography (OCT) images: PathVLM-R1's transfer performance improved by an average of 17.3% compared to traditional SFT methods. These results clearly indicate that PathVLM-R1 not only enhances accuracy but also possesses broad applicability and expansion potential.
FutureNet-LOF: Joint Trajectory Prediction and Lane Occupancy Field Prediction with Future Context Encoding
Jun 20, 2024



Most prior motion prediction endeavors in autonomous driving have inadequately encoded future scenarios, leading to predictions that may fail to accurately capture the diverse movements of agents (e.g., vehicles or pedestrians). To address this, we propose FutureNet, which explicitly integrates initially predicted trajectories into the future scenario and further encodes these future contexts to enhance subsequent forecasting. Additionally, most previous motion forecasting works have focused on predicting independent futures for each agent. However, safe and smooth autonomous driving requires accurately predicting the diverse future behaviors of numerous surrounding agents jointly in complex dynamic environments. Given that all agents occupy certain potential travel spaces and possess lane driving priority, we propose Lane Occupancy Field (LOF), a new representation with lane semantics for motion forecasting in autonomous driving. LOF can simultaneously capture the joint probability distribution of all road participants' future spatial-temporal positions. Due to the high compatibility between lane occupancy field prediction and trajectory prediction, we propose a novel network with future context encoding for the joint prediction of these two tasks. Our approach ranks 1st on two large-scale motion forecasting benchmarks: Argoverse 1 and Argoverse 2.
AmGCL: Feature Imputation of Attribute Missing Graph via Self-supervised Contrastive Learning
May 05, 2023



Attribute graphs are ubiquitous in multimedia applications, and graph representation learning (GRL) has been successful in analyzing attribute graph data. However, incomplete graph data and missing node attributes can have a negative impact on media knowledge discovery. Existing methods for handling attribute missing graph have limited assumptions or fail to capture complex attribute-graph dependencies. To address these challenges, we propose Attribute missing Graph Contrastive Learning (AmGCL), a framework for handling missing node attributes in attribute graph data. AmGCL leverages Dirichlet energy minimization-based feature precoding to encode in missing attributes and a self-supervised Graph Augmentation Contrastive Learning Structure (GACLS) to learn latent variables from the encoded-in data. Specifically, AmGCL utilizies feature reconstruction based on structure-attribute energy minimization while maximizes the lower bound of evidence for latent representation mutual information. Our experimental results on multiple real-world datasets demonstrate that AmGCL outperforms state-of-the-art methods in both feature imputation and node classification tasks, indicating the effectiveness of our proposed method in real-world attribute graph analysis tasks.
AACC: Asymmetric Actor-Critic in Contextual Reinforcement Learning
Aug 03, 2022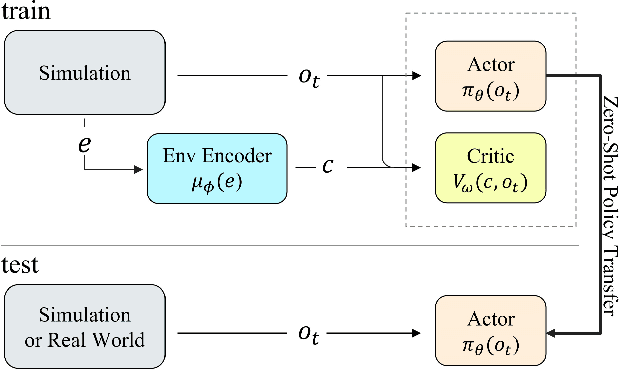

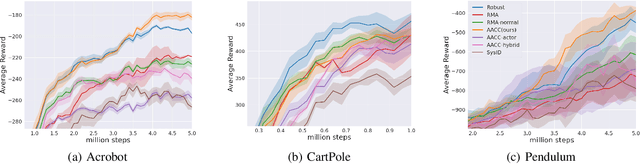

Reinforcement Learning (RL) techniques have drawn great attention in many challenging tasks, but their performance deteriorates dramatically when applied to real-world problems. Various methods, such as domain randomization, have been proposed to deal with such situations by training agents under different environmental setups, and therefore they can be generalized to different environments during deployment. However, they usually do not incorporate the underlying environmental factor information that the agents interact with properly and thus can be overly conservative when facing changes in the surroundings. In this paper, we first formalize the task of adapting to changing environmental dynamics in RL as a generalization problem using Contextual Markov Decision Processes (CMDPs). We then propose the Asymmetric Actor-Critic in Contextual RL (AACC) as an end-to-end actor-critic method to deal with such generalization tasks. We demonstrate the essential improvements in the performance of AACC over existing baselines experimentally in a range of simulated environments.