 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReshaping MOFs Text Mining with a Dynamic Multi-Agent Framework of Large Language Agents
Apr 26, 2025The mining of synthesis conditions for metal-organic frameworks (MOFs) is a significant focus in materials science. However, identifying the precise synthesis conditions for specific MOFs within the vast array of possibilities presents a considerable challenge. Large Language Models (LLMs) offer a promising solution to this problem. We leveraged the capabilities of LLMs, specifically gpt-4o-mini, as core agents to integrate various MOF-related agents, including synthesis, attribute, and chemical information agents. This integration culminated in the development of MOFh6, an LLM tool designed to streamline the MOF synthesis process. MOFh6 allows users to query in multiple formats, such as submitting scientific literature, or inquiring about specific MOF codes or structural properties. The tool analyzes these queries to provide optimal synthesis conditions and generates model files for density functional theory pre modeling. We believe MOFh6 will enhance efficiency in the MOF synthesis of all researchers.
Debiased high-dimensional regression calibration for errors-in-variables log-contrast models
Sep 11, 2024Motivated by the challenges in analyzing gut microbiome and metagenomic data, this work aims to tackle the issue of measurement errors in high-dimensional regression models that involve compositional covariates. This paper marks a pioneering effort in conducting statistical inference on high-dimensional compositional data affected by mismeasured or contaminated data. We introduce a calibration approach tailored for the linear log-contrast model. Under relatively lenient conditions regarding the sparsity level of the parameter, we have established the asymptotic normality of the estimator for inference. Numerical experiments and an application in microbiome study have demonstrated the efficacy of our high-dimensional calibration strategy in minimizing bias and achieving the expected coverage rates for confidence intervals. Moreover, the potential application of our proposed methodology extends well beyond compositional data, suggesting its adaptability for a wide range of research contexts.
Action and Trajectory Planning for Urban Autonomous Driving with Hierarchical Reinforcement Learning
Jun 28, 2023



Reinforcement Learning (RL) has made promising progress in planning and decision-making for Autonomous Vehicles (AVs) in simple driving scenarios. However, existing RL algorithms for AVs fail to learn critical driving skills in complex urban scenarios. First, urban driving scenarios require AVs to handle multiple driving tasks of which conventional RL algorithms are incapable. Second, the presence of other vehicles in urban scenarios results in a dynamically changing environment, which challenges RL algorithms to plan the action and trajectory of the AV. In this work, we propose an action and trajectory planner using Hierarchical Reinforcement Learning (atHRL) method, which models the agent behavior in a hierarchical model by using the perception of the lidar and birdeye view. The proposed atHRL method learns to make decisions about the agent's future trajectory and computes target waypoints under continuous settings based on a hierarchical DDPG algorithm. The waypoints planned by the atHRL model are then sent to a low-level controller to generate the steering and throttle commands required for the vehicle maneuver. We empirically verify the efficacy of atHRL through extensive experiments in complex urban driving scenarios that compose multiple tasks with the presence of other vehicles in the CARLA simulator. The experimental results suggest a significant performance improvement compared to the state-of-the-art RL methods.
End-to-end Reinforcement Learning of Robotic Manipulation with Robust Keypoints Representation
Feb 12, 2022



We present an end-to-end Reinforcement Learning(RL) framework for robotic manipulation tasks, using a robust and efficient keypoints representation. The proposed method learns keypoints from camera images as the state representation, through a self-supervised autoencoder architecture. The keypoints encode the geometric information, as well as the relationship of the tool and target in a compact representation to ensure efficient and robust learning. After keypoints learning, the RL step then learns the robot motion from the extracted keypoints state representation. The keypoints and RL learning processes are entirely done in the simulated environment. We demonstrate the effectiveness of the proposed method on robotic manipulation tasks including grasping and pushing, in different scenarios. We also investigate the generalization capability of the trained model. In addition to the robust keypoints representation, we further apply domain randomization and adversarial training examples to achieve zero-shot sim-to-real transfer in real-world robotic manipulation tasks.
Deep N-ary Error Correcting Output Codes
Oct 20, 2020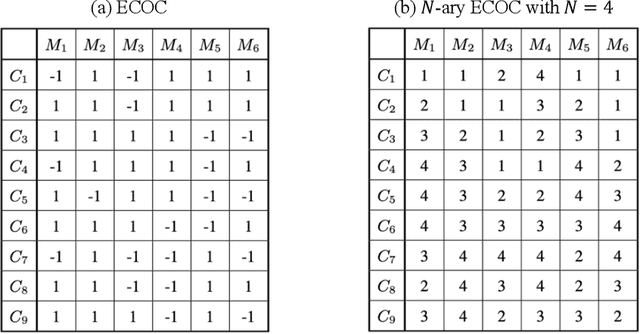
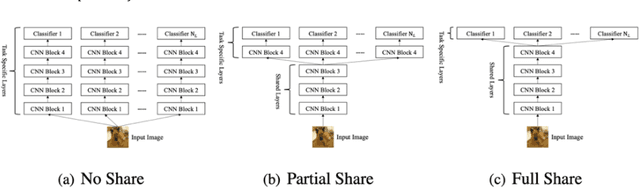
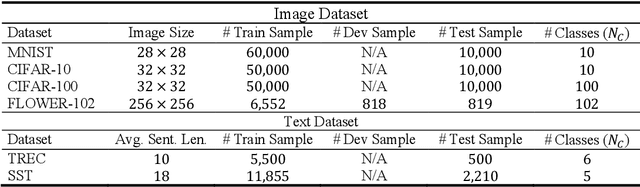
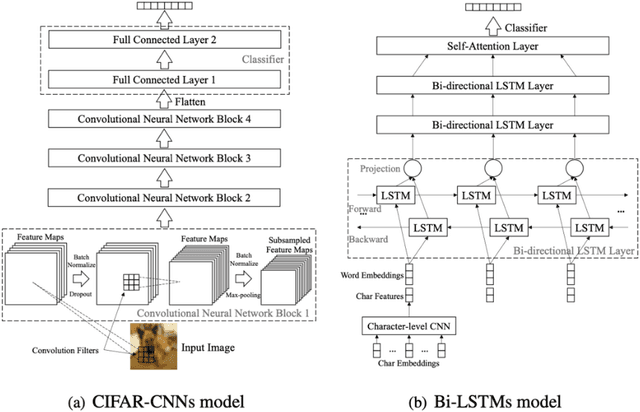
Ensemble learning consistently improves the performance of multi-class classification through aggregating a series of base classifiers. To this end, data-independent ensemble methods like Error Correcting Output Codes (ECOC) attract increasing attention due to its easiness of implementation and parallelization. Specifically, traditional ECOCs and its general extension N-ary ECOC decompose the original multi-class classification problem into a series of independent simpler classification subproblems. Unfortunately, integrating ECOCs, especially N-ary ECOC with deep neural networks, termed as deep N-ary ECOC, is not straightforward and yet fully exploited in the literature, due to the high expense of training base learners. To facilitate the training of N-ary ECOC with deep learning base learners, we further propose three different variants of parameter sharing architectures for deep N-ary ECOC. To verify the generalization ability of deep N-ary ECOC, we conduct experiments by varying the backbone with different deep neural network architectures for both image and text classification tasks. Furthermore, extensive ablation studies on deep N-ary ECOC show its superior performance over other deep data-independent ensemble methods.
Efficient Robotic Task Generalization Using Deep Model Fusion Reinforcement Learning
Dec 11, 2019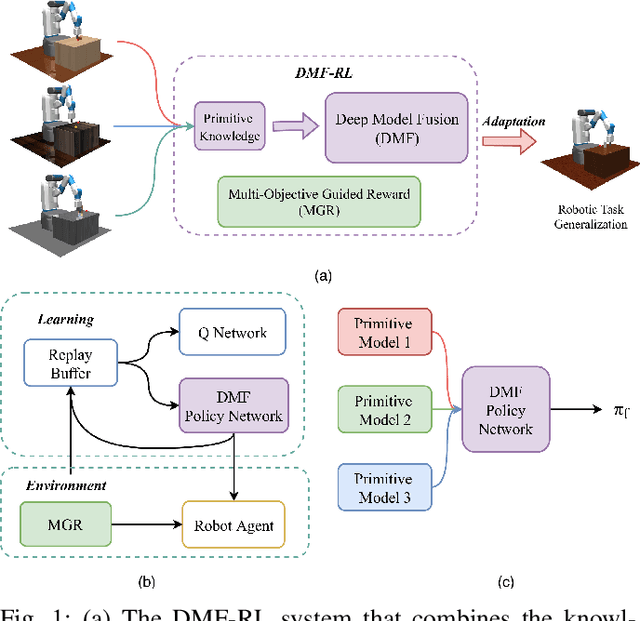
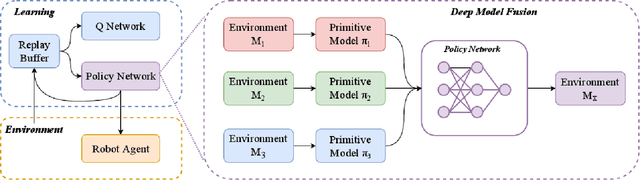
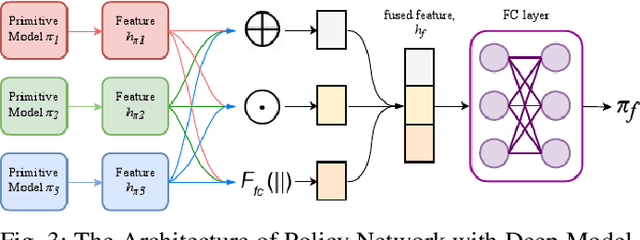

Learning-based methods have been used to pro-gram robotic tasks in recent years. However, extensive training is usually required not only for the initial task learning but also for generalizing the learned model to the same task but in different environments. In this paper, we propose a novel Deep Reinforcement Learning algorithm for efficient task generalization and environment adaptation in the robotic task learning problem. The proposed method is able to efficiently generalize the previously learned task by model fusion to solve the environment adaptation problem. The proposed Deep Model Fusion (DMF) method reuses and combines the previously trained model to improve the learning efficiency and results.Besides, we also introduce a Multi-objective Guided Reward(MGR) shaping technique to further improve training efficiency.The proposed method was benchmarked with previous methods in various environments to validate its effectiveness.
RoboCoDraw: Robotic Avatar Drawing with GAN-based Style Transfer and Time-efficient Path Optimization
Dec 11, 2019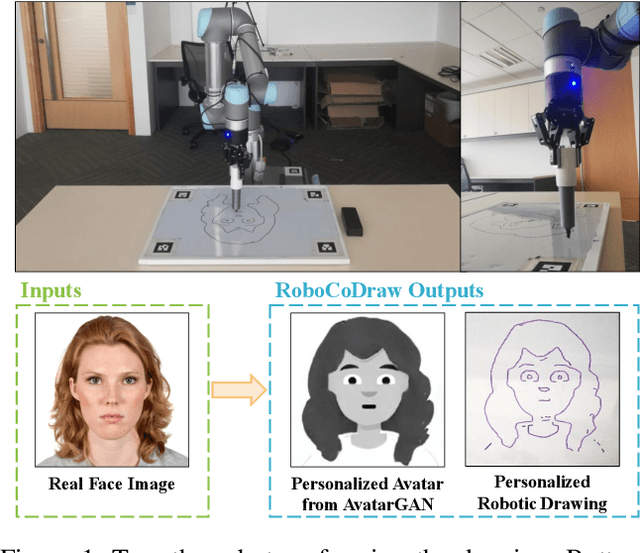
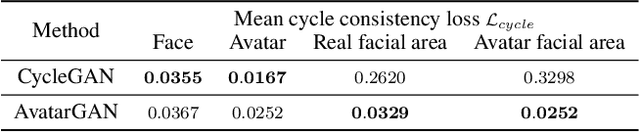

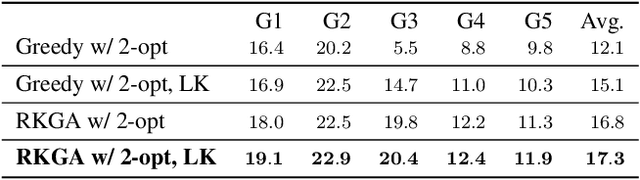
Robotic drawing has become increasingly popular as an entertainment and interactive tool. In this paper we present RoboCoDraw, a real-time collaborative robot-based drawing system that draws stylized human face sketches interactively in front of human users, by using the Generative Adversarial Network (GAN)-based style transfer and a Random-Key Genetic Algorithm (RKGA)-based path optimization. The proposed RoboCoDraw system takes a real human face image as input, converts it to a stylized avatar, then draws it with a robotic arm. A core component in this system is the Avatar-GAN proposed by us, which generates a cartoon avatar face image from a real human face. AvatarGAN is trained with unpaired face and avatar images only and can generate avatar images of much better likeness with human face images in comparison with the vanilla CycleGAN. After the avatar image is generated, it is fed to a line extraction algorithm and converted to sketches. An RKGA-based path optimization algorithm is applied to find a time-efficient robotic drawing path to be executed by the robotic arm. We demonstrate the capability of RoboCoDraw on various face images using a lightweight, safe collaborative robot UR5.
Sparse quadratic classification rules via linear dimension reduction
Jan 16, 2018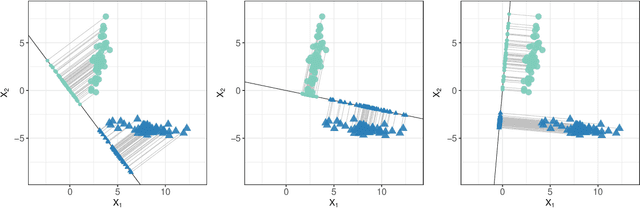
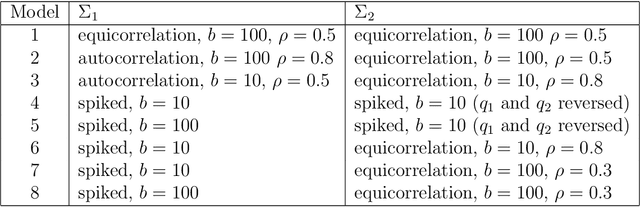
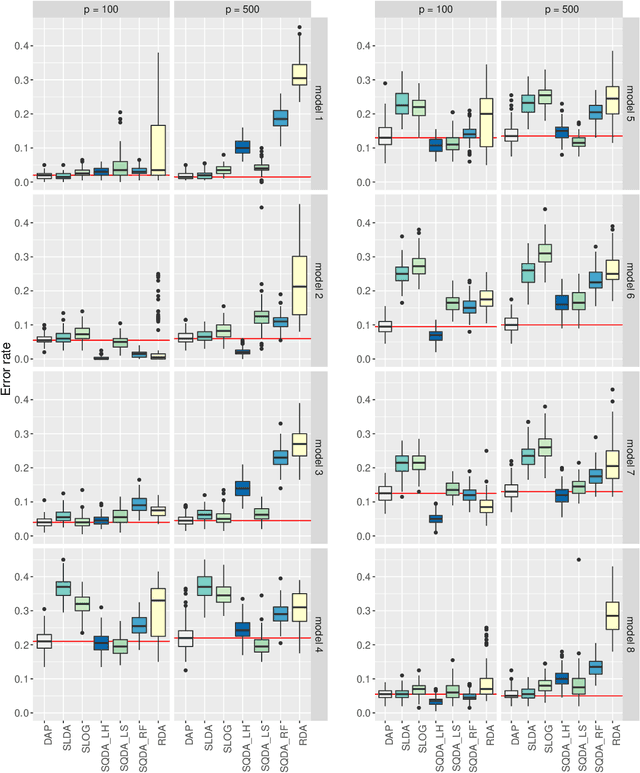

We consider the problem of high-dimensional classification between the two groups with unequal covariance matrices. Rather than estimating the full quadratic discriminant rule, we propose to perform simultaneous variable selection and linear dimension reduction on original data, with the subsequent application of quadratic discriminant analysis on the reduced space. In contrast to quadratic discriminant analysis, the proposed framework doesn't require estimation of precision matrices and scales linearly with the number of measurements, making it especially attractive for the use on high-dimensional datasets. We support the methodology with theoretical guarantees on variable selection consistency, and empirical comparison with competing approaches. We apply the method to gene expression data of breast cancer patients, and confirm the crucial importance of ESR1 gene in differentiating estrogen receptor status.