 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisuo-Tactile Manipulation Planning Using Reinforcement Learning with Affordance Representation
Jul 14, 2022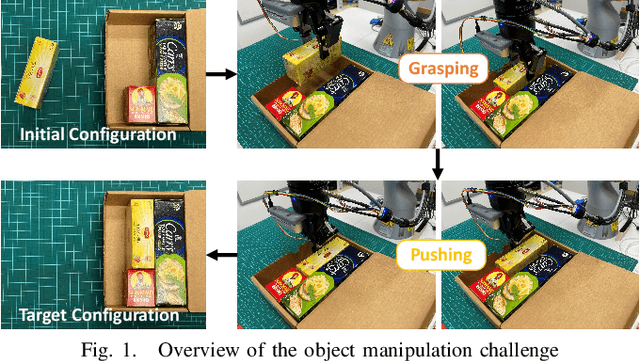
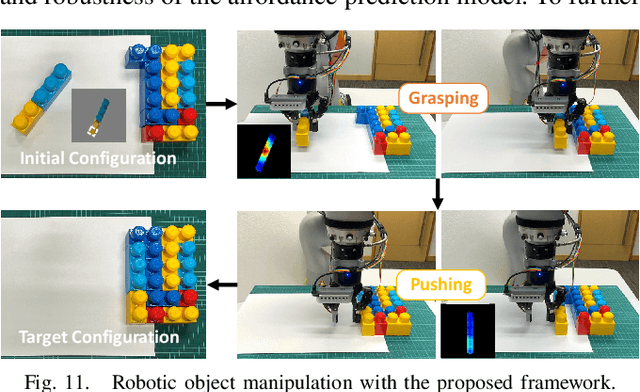

Robots are increasingly expected to manipulate objects in ever more unstructured environments where the object properties have high perceptual uncertainty from any single sensory modality. This directly impacts successful object manipulation. In this work, we propose a reinforcement learning-based motion planning framework for object manipulation which makes use of both on-the-fly multisensory feedback and a learned attention-guided deep affordance model as perceptual states. The affordance model is learned from multiple sensory modalities, including vision and touch (tactile and force/torque), which is designed to predict and indicate the manipulable regions of multiple affordances (i.e., graspability and pushability) for objects with similar appearances but different intrinsic properties (e.g., mass distribution). A DQN-based deep reinforcement learning algorithm is then trained to select the optimal action for successful object manipulation. To validate the performance of the proposed framework, our method is evaluated and benchmarked using both an open dataset and our collected dataset. The results show that the proposed method and overall framework outperform existing methods and achieve better accuracy and higher efficiency.
Efficient Robotic Task Generalization Using Deep Model Fusion Reinforcement Learning
Dec 11, 2019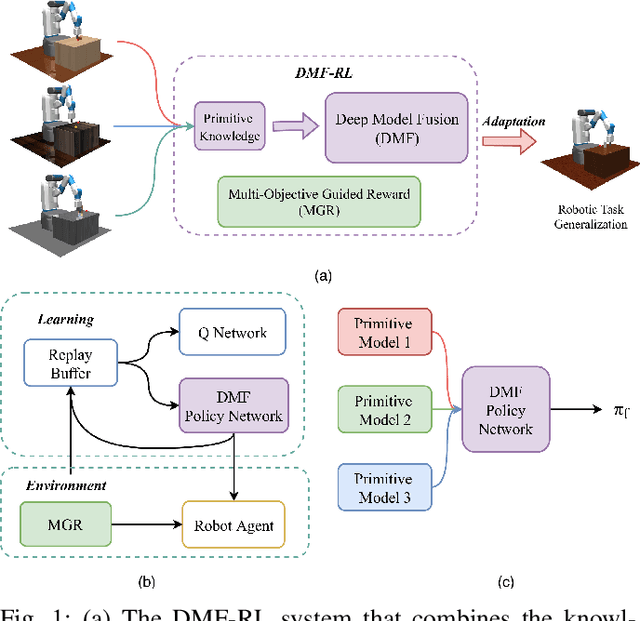
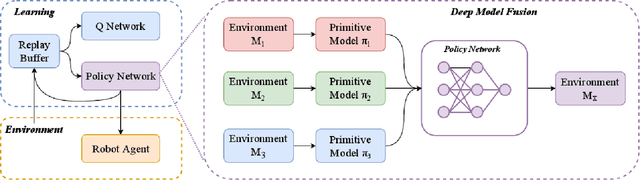
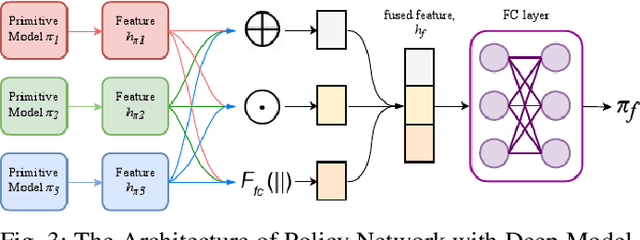

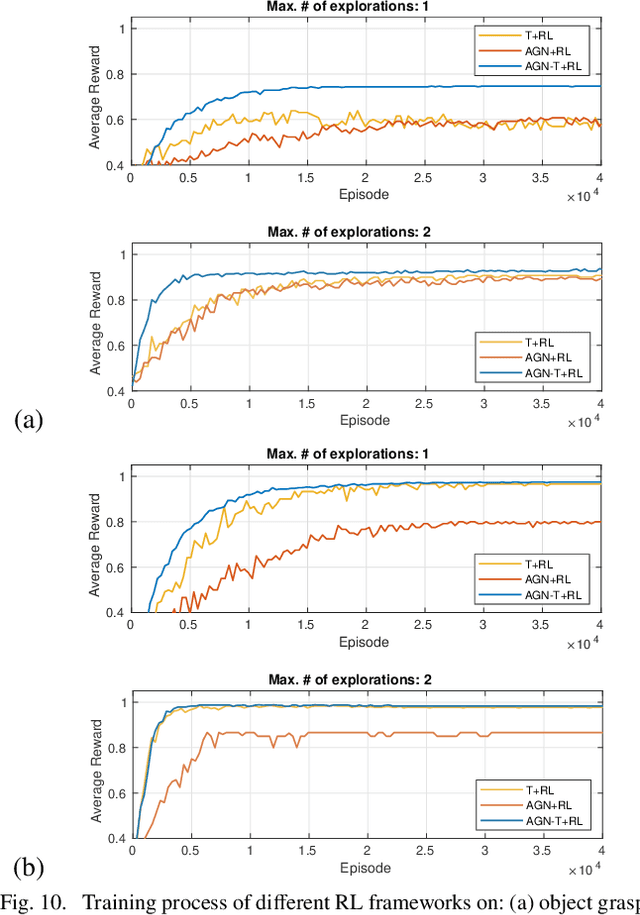
Learning-based methods have been used to pro-gram robotic tasks in recent years. However, extensive training is usually required not only for the initial task learning but also for generalizing the learned model to the same task but in different environments. In this paper, we propose a novel Deep Reinforcement Learning algorithm for efficient task generalization and environment adaptation in the robotic task learning problem. The proposed method is able to efficiently generalize the previously learned task by model fusion to solve the environment adaptation problem. The proposed Deep Model Fusion (DMF) method reuses and combines the previously trained model to improve the learning efficiency and results.Besides, we also introduce a Multi-objective Guided Reward(MGR) shaping technique to further improve training efficiency.The proposed method was benchmarked with previous methods in various environments to validate its effectiveness.
RoboCoDraw: Robotic Avatar Drawing with GAN-based Style Transfer and Time-efficient Path Optimization
Dec 11, 2019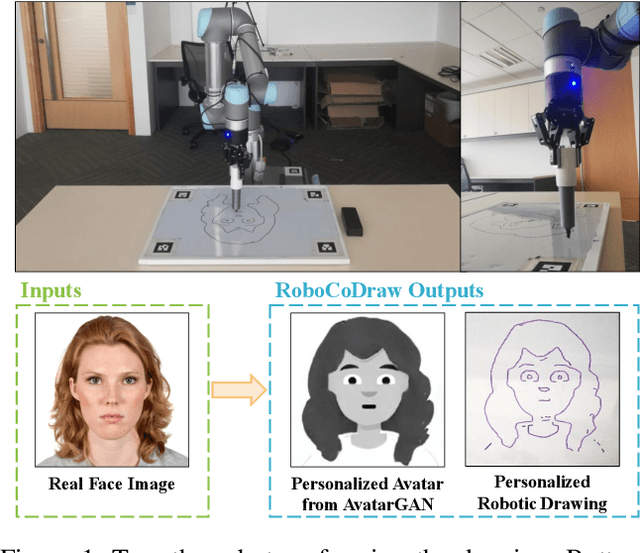
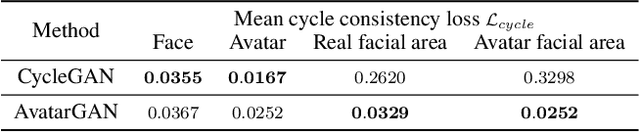

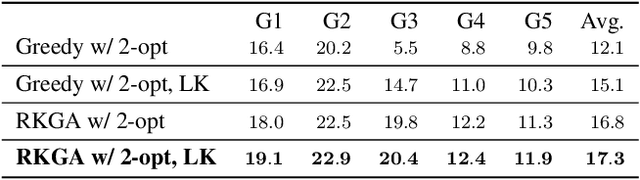
Robotic drawing has become increasingly popular as an entertainment and interactive tool. In this paper we present RoboCoDraw, a real-time collaborative robot-based drawing system that draws stylized human face sketches interactively in front of human users, by using the Generative Adversarial Network (GAN)-based style transfer and a Random-Key Genetic Algorithm (RKGA)-based path optimization. The proposed RoboCoDraw system takes a real human face image as input, converts it to a stylized avatar, then draws it with a robotic arm. A core component in this system is the Avatar-GAN proposed by us, which generates a cartoon avatar face image from a real human face. AvatarGAN is trained with unpaired face and avatar images only and can generate avatar images of much better likeness with human face images in comparison with the vanilla CycleGAN. After the avatar image is generated, it is fed to a line extraction algorithm and converted to sketches. An RKGA-based path optimization algorithm is applied to find a time-efficient robotic drawing path to be executed by the robotic arm. We demonstrate the capability of RoboCoDraw on various face images using a lightweight, safe collaborative robot UR5.