 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Unobserved Confounders: A Kernelized Regression Approach
Jan 01, 2026Detecting unobserved confounders is crucial for reliable causal inference in observational studies. Existing methods require either linearity assumptions or multiple heterogeneous environments, limiting applicability to nonlinear single-environment settings. To bridge this gap, we propose Kernel Regression Confounder Detection (KRCD), a novel method for detecting unobserved confounding in nonlinear observational data under single-environment conditions. KRCD leverages reproducing kernel Hilbert spaces to model complex dependencies. By comparing standard and higherorder kernel regressions, we derive a test statistic whose significant deviation from zero indicates unobserved confounding. Theoretically, we prove two key results: First, in infinite samples, regression coefficients coincide if and only if no unobserved confounders exist. Second, finite-sample differences converge to zero-mean Gaussian distributions with tractable variance. Extensive experiments on synthetic benchmarks and the Twins dataset demonstrate that KRCD not only outperforms existing baselines but also achieves superior computational efficiency.
Breaking the Gradient Barrier: Unveiling Large Language Models for Strategic Classification
Nov 10, 2025Strategic classification~(SC) explores how individuals or entities modify their features strategically to achieve favorable classification outcomes. However, existing SC methods, which are largely based on linear models or shallow neural networks, face significant limitations in terms of scalability and capacity when applied to real-world datasets with significantly increasing scale, especially in financial services and the internet sector. In this paper, we investigate how to leverage large language models to design a more scalable and efficient SC framework, especially in the case of growing individuals engaged with decision-making processes. Specifically, we introduce GLIM, a gradient-free SC method grounded in in-context learning. During the feed-forward process of self-attention, GLIM implicitly simulates the typical bi-level optimization process of SC, including both the feature manipulation and decision rule optimization. Without fine-tuning the LLMs, our proposed GLIM enjoys the advantage of cost-effective adaptation in dynamic strategic environments. Theoretically, we prove GLIM can support pre-trained LLMs to adapt to a broad range of strategic manipulations. We validate our approach through experiments with a collection of pre-trained LLMs on real-world and synthetic datasets in financial and internet domains, demonstrating that our GLIM exhibits both robustness and efficiency, and offering an effective solution for large-scale SC tasks.
MRBTP: Efficient Multi-Robot Behavior Tree Planning and Collaboration
Feb 25, 2025Multi-robot task planning and collaboration are critical challenges in robotics. While Behavior Trees (BTs) have been established as a popular control architecture and are plannable for a single robot, the development of effective multi-robot BT planning algorithms remains challenging due to the complexity of coordinating diverse action spaces. We propose the Multi-Robot Behavior Tree Planning (MRBTP) algorithm, with theoretical guarantees of both soundness and completeness. MRBTP features cross-tree expansion to coordinate heterogeneous actions across different BTs to achieve the team's goal. For homogeneous actions, we retain backup structures among BTs to ensure robustness and prevent redundant execution through intention sharing. While MRBTP is capable of generating BTs for both homogeneous and heterogeneous robot teams, its efficiency can be further improved. We then propose an optional plugin for MRBTP when Large Language Models (LLMs) are available to reason goal-related actions for each robot. These relevant actions can be pre-planned to form long-horizon subtrees, significantly enhancing the planning speed and collaboration efficiency of MRBTP. We evaluate our algorithm in warehouse management and everyday service scenarios. Results demonstrate MRBTP's robustness and execution efficiency under varying settings, as well as the ability of the pre-trained LLM to generate effective task-specific subtrees for MRBTP.
Efficient Behavior Tree Planning with Commonsense Pruning and Heuristic
Jun 04, 2024



Behavior Tree (BT) planning is crucial for autonomous robot behavior control, yet its application in complex scenarios is hampered by long planning times. Pruning and heuristics are common techniques to accelerate planning, but it is difficult to design general pruning strategies and heuristic functions for BT planning problems. This paper proposes improving BT planning efficiency for everyday service robots leveraging commonsense reasoning provided by Large Language Models (LLMs), leading to model-free pre-planning action space pruning and heuristic generation. This approach takes advantage of the modularity and interpretability of BT nodes, represented by predicate logic, to enable LLMs to predict the task-relevant action predicates and objects, and even the optimal path, without an explicit action model. We propose the Heuristic Optimal Behavior Tree Expansion Algorithm (HOBTEA) with two heuristic variants and provide a formal comparison and discussion of their efficiency and optimality. We introduce a learnable and transferable commonsense library to enhance the LLM's reasoning performance without fine-tuning. The action space expansion based on the commonsense library can further increase the success rate of planning. Experiments show the theoretical bounds of commonsense pruning and heuristic, and demonstrate the actual performance of LLM learning and reasoning with the commonsense library. Results in four datasets showcase the practical effectiveness of our approach in everyday service robot applications.
Integrating Intent Understanding and Optimal Behavior Planning for Behavior Tree Generation from Human Instructions
May 13, 2024



Robots executing tasks following human instructions in domestic or industrial environments essentially require both adaptability and reliability. Behavior Tree (BT) emerges as an appropriate control architecture for these scenarios due to its modularity and reactivity. Existing BT generation methods, however, either do not involve interpreting natural language or cannot theoretically guarantee the BTs' success. This paper proposes a two-stage framework for BT generation, which first employs large language models (LLMs) to interpret goals from high-level instructions, then constructs an efficient goal-specific BT through the Optimal Behavior Tree Expansion Algorithm (OBTEA). We represent goals as well-formed formulas in first-order logic, effectively bridging intent understanding and optimal behavior planning. Experiments in the service robot validate the proficiency of LLMs in producing grammatically correct and accurately interpreted goals, demonstrate OBTEA's superiority over the baseline BT Expansion algorithm in various metrics, and finally confirm the practical deployability of our framework. The project website is https://dids-ei.github.io/Project/LLM-OBTEA/.
Task2Morph: Differentiable Task-inspired Framework for Contact-Aware Robot Design
Mar 28, 2024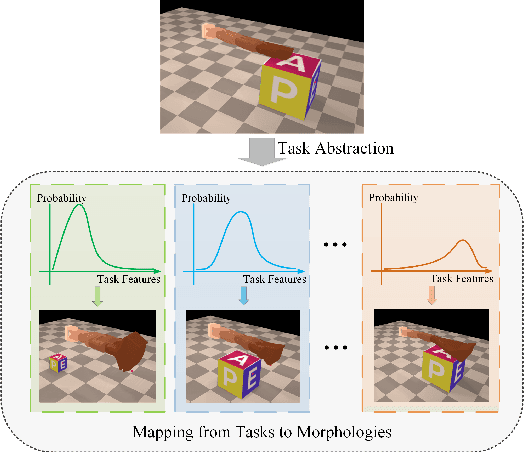
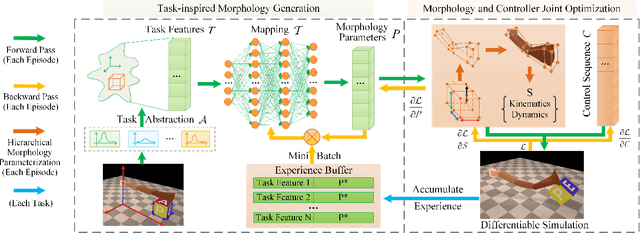
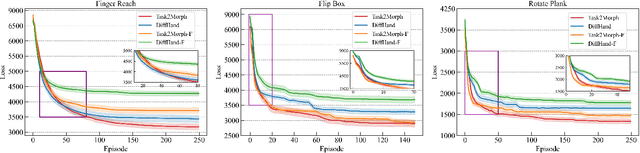

Optimizing the morphologies and the controllers that adapt to various tasks is a critical issue in the field of robot design, aka. embodied intelligence. Previous works typically model it as a joint optimization problem and use search-based methods to find the optimal solution in the morphology space. However, they ignore the implicit knowledge of task-to-morphology mapping which can directly inspire robot design. For example, flipping heavier boxes tends to require more muscular robot arms. This paper proposes a novel and general differentiable task-inspired framework for contact-aware robot design called Task2Morph. We abstract task features highly related to task performance and use them to build a task-to-morphology mapping. Further, we embed the mapping into a differentiable robot design process, where the gradient information is leveraged for both the mapping learning and the whole optimization. The experiments are conducted on three scenarios, and the results validate that Task2Morph outperforms DiffHand, which lacks a task-inspired morphology module, in terms of efficiency and effectiveness.
* 9 pages, 10 figures, published to IROS