 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Assisted NLOS Sensing for RIS-Based Indoor Localization in Smart Factories
May 21, 2025In the era of Industry 4.0, precise indoor localization is vital for automation and efficiency in smart factories. Reconfigurable Intelligent Surfaces (RIS) are emerging as key enablers in 6G networks for joint sensing and communication. However, RIS faces significant challenges in Non-Line-of-Sight (NLOS) and multipath propagation, particularly in localization scenarios, where detecting NLOS conditions is crucial for ensuring not only reliable results and increased connectivity but also the safety of smart factory personnel. This study introduces an AI-assisted framework employing a Convolutional Neural Network (CNN) customized for accurate Line-of-Sight (LOS) and Non-Line-of-Sight (NLOS) classification to enhance RIS-based localization using measured, synthetic, mixed-measured, and mixed-synthetic experimental data, that is, original, augmented, slightly noisy, and highly noisy data, respectively. Validated through such data from three different environments, the proposed customized-CNN (cCNN) model achieves {95.0\%-99.0\%} accuracy, outperforming standard pre-trained models like Visual Geometry Group 16 (VGG-16) with an accuracy of {85.5\%-88.0\%}. By addressing RIS limitations in NLOS scenarios, this framework offers scalable and high-precision localization solutions for 6G-enabled smart factories.
Degrees of Freedom of Holographic MIMO -- Fundamental Theory and Analytical Methods
Apr 17, 2025Holographic multiple-input multiple-output (MIMO) is envisioned as one of the most promising technology enablers for future sixth-generation (6G) networks. The use of electrically large holographic surface (HoloS) antennas has the potential to significantly boost the spatial multiplexing gain by increasing the number of degrees of freedom (DoF), even in line-of-sight (LoS) channels. In this context, the research community has shown a growing interest in characterizing the fundamental limits of this technology. In this paper, we compare the two analytical methods commonly utilized in the literature for this purpose: the cut-set integral and the self-adjoint operator. We provide a detailed description of both methods and discuss their advantages and limitations.
RiLoCo: An ISAC-oriented AI Solution to Build RIS-empowered Networks
Mar 07, 2025The advance towards 6G networks comes with the promise of unprecedented performance in sensing and communication capabilities. The feat of achieving those, while satisfying the ever-growing demands placed on wireless networks, promises revolutionary advancements in sensing and communication technologies. As 6G aims to cater to the growing demands of wireless network users, the implementation of intelligent and efficient solutions becomes essential. In particular, reconfigurable intelligent surfaces (RISs), also known as Smart Surfaces, are envisioned as a transformative technology for future 6G networks. The performance of RISs when used to augment existing devices is nevertheless largely affected by their precise location. Suboptimal deployments are also costly to correct, negating their low-cost benefits. This paper investigates the topic of optimal RISs diffusion, taking into account the improvement they provide both for the sensing and communication capabilities of the infrastructure while working with other antennas and sensors. We develop a combined metric that takes into account the properties and location of the individual devices to compute the performance of the entire infrastructure. We then use it as a foundation to build a reinforcement learning architecture that solves the RIS deployment problem. Since our metric measures the surface where given localization thresholds are achieved and the communication coverage of the area of interest, the novel framework we provide is able to seamlessly balance sensing and communication, showing its performance gain against reference solutions, where it achieves simultaneously almost the reference performance for communication and the reference performance for localization.
REACT: Multi Robot Energy-Aware Orchestrator for Indoor Search and Rescue Critical Tasks
Mar 07, 2025Smart factories enhance production efficiency and sustainability, but emergencies like human errors, machinery failures and natural disasters pose significant risks. In critical situations, such as fires or earthquakes, collaborative robots can assist first-responders by entering damaged buildings and locating missing persons, mitigating potential losses. Unlike previous solutions that overlook the critical aspect of energy management, in this paper we propose REACT, a smart energy-aware orchestrator that optimizes the exploration phase, ensuring prolonged operational time and effective area coverage. Our solution leverages a fleet of collaborative robots equipped with advanced sensors and communication capabilities to explore and navigate unknown indoor environments, such as smart factories affected by fires or earthquakes, with high density of obstacles. By leveraging real-time data exchange and cooperative algorithms, the robots dynamically adjust their paths, minimize redundant movements and reduce energy consumption. Extensive simulations confirm that our approach significantly improves the efficiency and reliability of search and rescue missions in complex indoor environments, improving the exploration rate by 10% over existing methods and reaching a map coverage of 97% under time critical operations, up to nearly 100% under relaxed time constraint.
Calibration in RIS-aided Integrated Sensing, Localization and Communication Systems
Sep 25, 2024



Reconfigurable intelligent surfaces (RISs) are key enablers for integrated sensing and communication (ISAC) systems in the 6G communication era. With the capability of dynamically shaping the channel, RISs can enhance communication coverage. Additionally, RISs can serve as additional anchors with high angular resolution to improve localization and sensing services in extreme scenarios. However, knowledge of anchors' states such as position, orientation, and hardware impairments are crucial for localization and sensing applications, requiring dedicated calibration, including geometry and hardware calibration. This paper provides an overview of various types of RIS calibration, their impacts, and the challenges they pose in ISAC systems.
Spatial Multiplexing in Near-Field Line-of-Sight MIMO Communications: Paraxial and Non-Paraxial Deployments
Jun 27, 2024
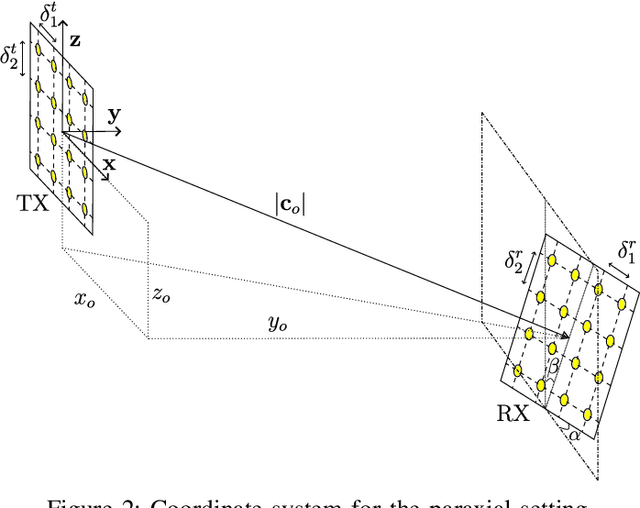
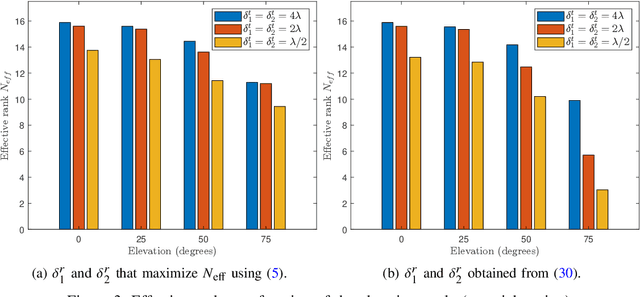

Sixth generation (6G) wireless networks are envisioned to include aspects of energy footprint reduction (sustainability), besides those of network capacity and connectivity, at the design stage. This paradigm change requires radically new physical layer technologies. Notably, the integration of large-aperture arrays and the transmission over high frequency bands, such as the sub-terahertz spectrum, are two promising options. In many communication scenarios of practical interest, the use of large antenna arrays in the sub-terahertz frequency range often results in short-range transmission distances that are characterized by line-of-sight channels, in which pairs of transmitters and receivers are located in the (radiating) near field of one another. These features make the traditional designs, based on the far-field approximation, for multiple-input multiple-output (MIMO) systems sub-optimal in terms of spatial multiplexing gains. To overcome these limitations, new designs for MIMO systems are required, which account for the spherical wavefront that characterizes the electromagnetic waves in the near field, in order to ensure the highest spatial multiplexing gain without increasing the power expenditure. In this paper, we introduce an analytical framework for optimizing the deployment of antenna arrays in line-of-sight channels, which can be applied to paraxial and non-paraxial network deployments. In the paraxial setting, we devise a simpler analytical framework, which, compared to those available in the literature, provides explicit information about the impact of key design parameters. In the non-paraxial setting, we introduce a novel analytical framework that allows us to identify a set of sufficient conditions to be fulfilled for achieving the highest spatial multiplexing gain. The proposed designs are validated with numerical simulations.
Are you a robot? Detecting Autonomous Vehicles from Behavior Analysis
Mar 14, 2024The tremendous hype around autonomous driving is eagerly calling for emerging and novel technologies to support advanced mobility use cases. As car manufactures keep developing SAE level 3+ systems to improve the safety and comfort of passengers, traffic authorities need to establish new procedures to manage the transition from human-driven to fully-autonomous vehicles while providing a feedback-loop mechanism to fine-tune envisioned autonomous systems. Thus, a way to automatically profile autonomous vehicles and differentiate those from human-driven ones is a must. In this paper, we present a fully-fledged framework that monitors active vehicles using camera images and state information in order to determine whether vehicles are autonomous, without requiring any active notification from the vehicles themselves. Essentially, it builds on the cooperation among vehicles, which share their data acquired on the road feeding a machine learning model to identify autonomous cars. We extensively tested our solution and created the NexusStreet dataset, by means of the CARLA simulator, employing an autonomous driving control agent and a steering wheel maneuvered by licensed drivers. Experiments show it is possible to discriminate the two behaviors by analyzing video clips with an accuracy of 80%, which improves up to 93% when the target state information is available. Lastly, we deliberately degraded the state to observe how the framework performs under non-ideal data collection conditions.
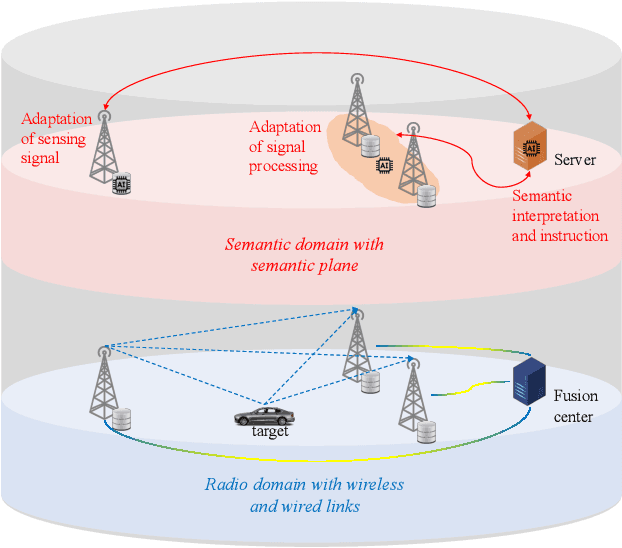
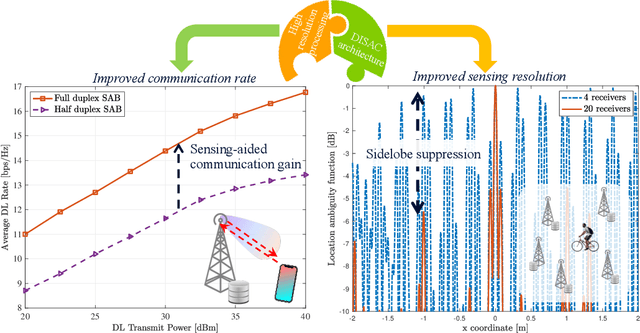
Distributed Intelligent Integrated Sensing and Communications: The 6G-DISAC Approach
Feb 28, 2024This paper introduces the concept of Distributed Intelligent integrated Sensing and Communications (DISAC), which expands the capabilities of Integrated Sensing and Communications (ISAC) towards distributed architectures. Additionally, the DISAC framework integrates novel waveform design with new semantic and goal-oriented communication paradigms, enabling ISAC technologies to transition from traditional data fusion to the semantic composition of diverse sensed and shared information. This progress facilitates large-scale, energy-efficient support for high-precision spatial-temporal processing, optimizing ISAC resource utilization, and enabling effective multi-modal sensing performance. Addressing key challenges such as efficient data management and connect-compute resource utilization, 6G- DISAC stands to revolutionize applications in diverse sectors including transportation, healthcare, and industrial automation. Our study encapsulates the project vision, methodologies, and potential impact, marking a significant stride towards a more connected and intelligent world.
Towards Distributed and Intelligent Integrated Sensing and Communications for 6G Networks
Feb 18, 2024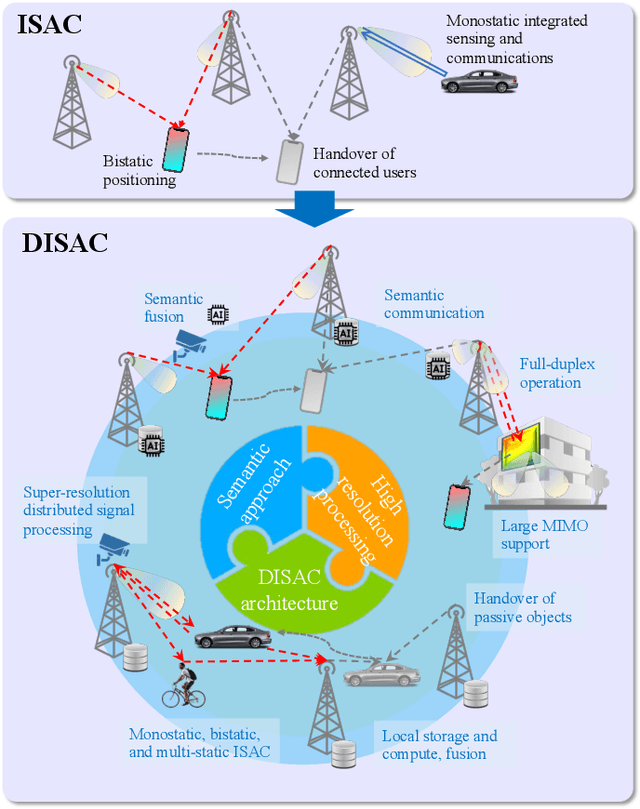
This paper introduces the distributed and intelligent integrated sensing and communications (DISAC) concept, a transformative approach for 6G wireless networks that extends the emerging concept of integrated sensing and communications (ISAC). DISAC addresses the limitations of the existing ISAC models and, to overcome them, it introduces two novel foundational functionalities for both sensing and communications: a distributed architecture and a semantic and goal-oriented framework. The distributed architecture enables large-scale and energy-efficient tracking of connected users and objects, leveraging the fusion of heterogeneous sensors. The semantic and goal-oriented intelligent and parsimonious framework, enables the transition from classical data fusion to the composition of semantically selected information, offering new paradigms for the optimization of resource utilization and exceptional multi-modal sensing performance across various use cases. This paper details DISAC's principles, architecture, and potential applications.
Goal-Oriented and Semantic Communication in 6G AI-Native Networks: The 6G-GOALS Approach
Feb 12, 2024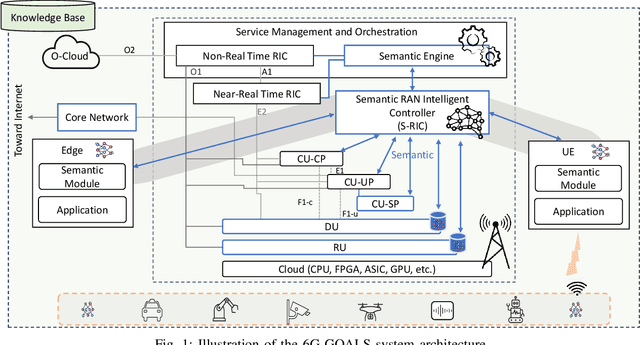
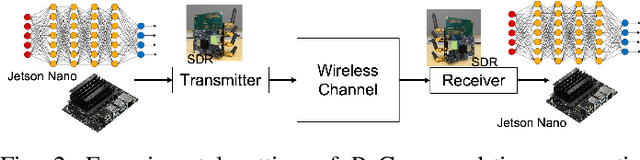
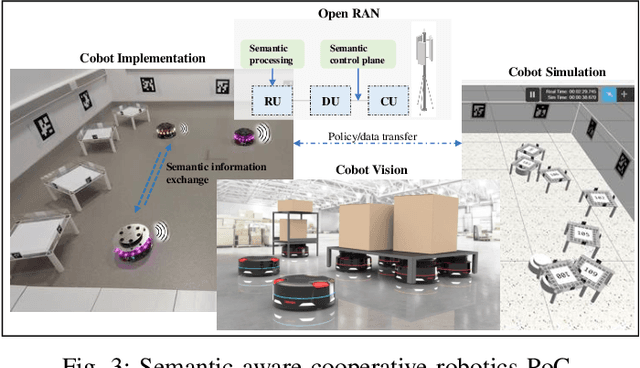
Recent advances in AI technologies have notably expanded device intelligence, fostering federation and cooperation among distributed AI agents. These advancements impose new requirements on future 6G mobile network architectures. To meet these demands, it is essential to transcend classical boundaries and integrate communication, computation, control, and intelligence. This paper presents the 6G-GOALS approach to goal-oriented and semantic communications for AI-Native 6G Networks. The proposed approach incorporates semantic, pragmatic, and goal-oriented communication into AI-native technologies, aiming to facilitate information exchange between intelligent agents in a more relevant, effective, and timely manner, thereby optimizing bandwidth, latency, energy, and electromagnetic field (EMF) radiation. The focus is on distilling data to its most relevant form and terse representation, aligning with the source's intent or the destination's objectives and context, or serving a specific goal. 6G-GOALS builds on three fundamental pillars: i) AI-enhanced semantic data representation, sensing, compression, and communication, ii) foundational AI reasoning and causal semantic data representation, contextual relevance, and value for goal-oriented effectiveness, and iii) sustainability enabled by more efficient wireless services. Finally, we illustrate two proof-of-concepts implementing semantic, goal-oriented, and pragmatic communication principles in near-future use cases. Our study covers the project's vision, methodologies, and potential impact.