 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAngle of Arrival Estimation for Gesture Recognition from reflective body-worn tags
Jan 22, 2026We investigate hand gesture recognition by leveraging passive reflective tags worn on the body. Considering a large set of gestures, distinct patterns are difficult to be captured by learning algorithms using backscattered received signal strength (RSS) and phase signals. This is because these features often exhibit similarities across signals from different gestures. To address this limitation, we explore the estimation of Angle of Arrival (AoA) as a distinguishing feature, since AoA characteristically varies during body motion. To ensure reliable estimation in our system, which employs Smart Antenna Switching (SAS), we first validate AoA estimation using the Multiple SIgnal Classification (MUSIC) algorithm while the tags are fixed at specific angles. Building on this, we propose an AoA tracking method based on Kalman smoothing. Our analysis demonstrates that, while RSS and phase alone are insufficient for distinguishing certain gesture data, AoA tracking can effectively differentiate them. To evaluate the effectiveness of AoA tracking, we implement gesture recognition system benchmarks and show that incorporating AoA features significantly boosts their performance. Improvements of up to 15% confirm the value of AoA-based enhancement.
Gesture Recognition from body-Worn RFID under Missing Data
Jan 22, 2026We explore hand-gesture recognition through the use of passive body-worn reflective tags. A data processing pipeline is proposed to address the issue of missing data. Specifically, missing information is recovered through linear and exponential interpolation and extrapolation. Furthermore, imputation and proximity-based inference are employed. We represent tags as nodes in a temporal graph, with edges formed based on correlations between received signal strength (RSS) and phase values across successive timestamps, and we train a graph-based convolutional neural network that exploits graph-based self-attention. The system outperforms state-of-the-art methods with an accuracy of 98.13% for the recognition of 21 gestures. We achieve 89.28% accuracy under leave-one-person-out cross-validation. We further investigate the contribution of various body locations on the recognition accuracy. Removing tags from the arms reduces accuracy by more than 10%, while removing the wrist tag only reduces accuracy by around 2%. Therefore, tag placements on the arms are more expressive for gesture recognition than on the wrist.
Calibration in RIS-aided Integrated Sensing, Localization and Communication Systems
Sep 25, 2024



Reconfigurable intelligent surfaces (RISs) are key enablers for integrated sensing and communication (ISAC) systems in the 6G communication era. With the capability of dynamically shaping the channel, RISs can enhance communication coverage. Additionally, RISs can serve as additional anchors with high angular resolution to improve localization and sensing services in extreme scenarios. However, knowledge of anchors' states such as position, orientation, and hardware impairments are crucial for localization and sensing applications, requiring dedicated calibration, including geometry and hardware calibration. This paper provides an overview of various types of RIS calibration, their impacts, and the challenges they pose in ISAC systems.
RIS Position and Orientation Estimation via Multi-Carrier Transmissions and Multiple Receivers
Nov 15, 2023



Reconfigurable intelligent surfaces (RISs) are considered as an enabling technology for the upcoming sixth generation of wireless systems, exhibiting significant potential for radio localization and sensing. An RIS is usually treated as an anchor point with known position and orientation when deployed to offer user localization. However, it can also be attached to a user to enable its localization in a semi-passive manner. In this paper, we consider a static user equipped with an RIS and study the RIS localization problem (i.e., joint three-dimensional position and orientation estimation), when operating in a system comprising a single-antenna transmitter and multiple synchronized single-antenna receivers with known locations. We present a multi-stage estimator using time-of-arrival and spatial frequency measurements, and derive the Cram\'er-Rao lower bounds for the estimated parameters to validate the estimator's performance. Our simulation results demonstrate the efficiency of the proposed RIS state estimation approach under various system operation parameters.
Joint User Localization and Location Calibration of A Hybrid Reconfigurable Intelligent Surface
Oct 18, 2022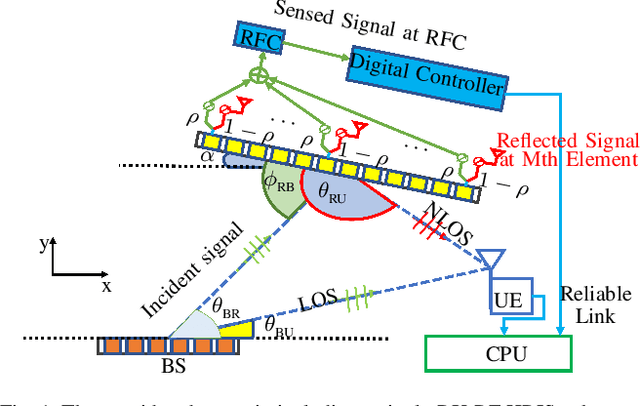
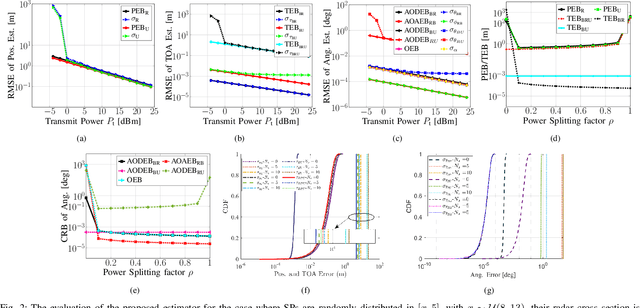
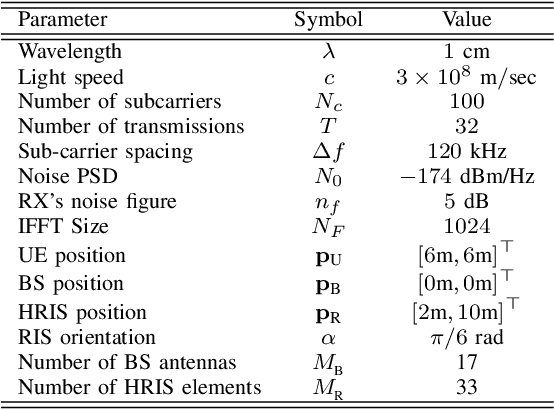
The recent research in the emerging technology of reconfigurable intelligent surfaces (RISs) has identified its high potential for localization and sensing. However, to accurately localize a user placed in the area of influence of an RIS, the RIS location needs to be known a priori and its phase profile is required to be optimized for localization. In this paper, we study the problem of the joint localization of a hybrid RIS (HRIS) and a user, considering that the former is equipped with a single reception radio-frequency (RF) chain enabling simultaneous tunable reflections and sensing via power splitting. Focusing on the downlink of a multi-antenna base station, we present a multi-stage approach for the estimation of the HRIS position and orientation as well as the user position. Our simulation results, including comparisons with the Cram\'er-Rao lower bounds, demonstrate the efficiency of the proposed localization approach, while showcasing that there exists an optimal HRIS power splitting ratio for the desired multi-parameter estimation problem.
Bi-Static Sensing for Near-Field RIS Localization
Jun 28, 2022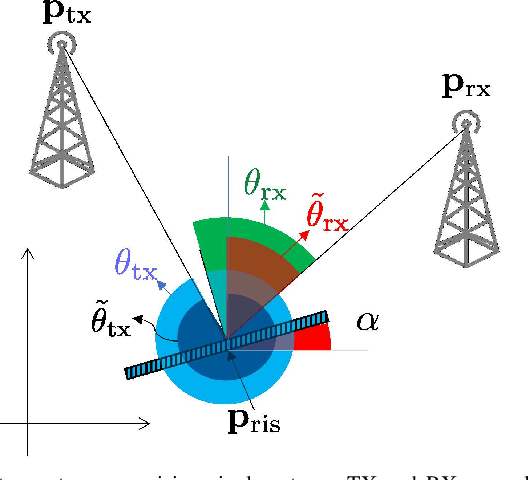
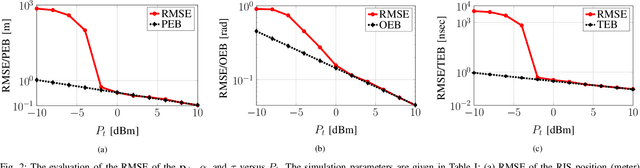
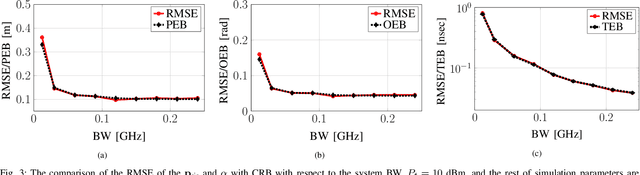
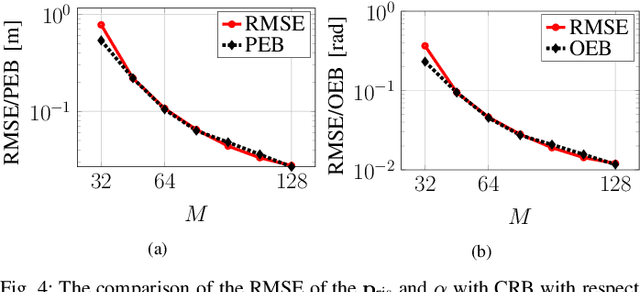
We address the localization of a reconfigurable intelligent surface (RIS) for a single-input single-output multi-carrier system using bi-static sensing between a fixed transmitter and a fixed receiver. Due to the deployment of RISs with a large dimension, near-field (NF) scenarios are likely to occur, especially for indoor applications, and are the focus of this work. We first derive the Cramer-Rao bounds (CRBs) on the estimation error of the RIS position and orientation and the time of arrival (TOA) for the path transmitter-RIS-receiver. We propose a multi-stage low-complexity estimator for RIS localization purposes. In this proposed estimator, we first perform a line search to estimate the TOA. Then, we use the far-field approximation of the NF signal model to implicitly estimate the angle of arrival and the angle of departure at the RIS center. Finally, the RIS position and orientation estimate are refined via a quasi-Newton method. Simulation results reveal that the proposed estimator can attain the CRBs. We also investigate the effects of several influential factors on the accuracy of the proposed estimator like the RIS size, transmitted power, system bandwidth, and RIS position and orientation.
Channel Model Mismatch Analysis for XL-MIMO Systems from a Localization Perspective
May 30, 2022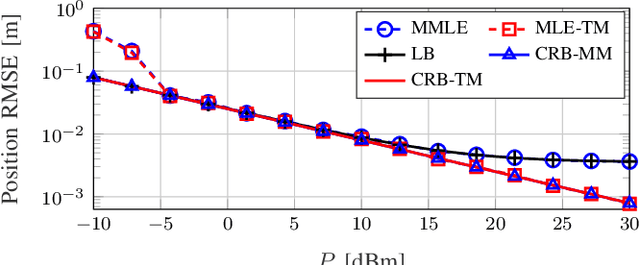
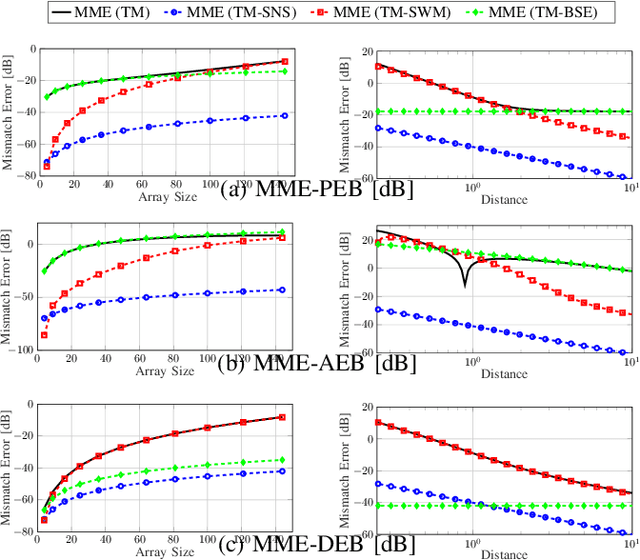
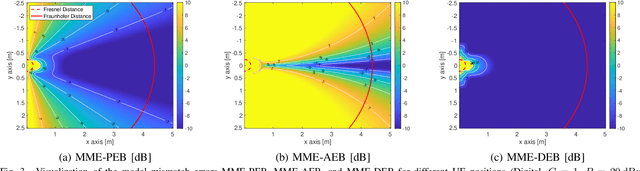
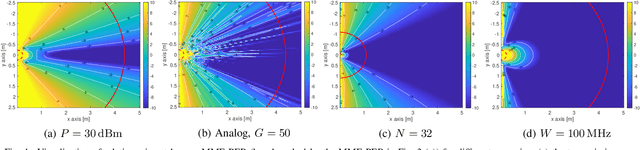
Radio localization is applied in high-frequency (e.g., mmWave and THz) systems to support communication and to provide location-based services without extra infrastructure. {For solving localization problems, a simplified, stationary, narrowband far-field channel model is widely used due to its compact formulation.} However, with increased array size in extra-large MIMO systems and increased bandwidth at upper mmWave bands, the effect of channel spatial non-stationarity (SNS), spherical wave model (SWM), and beam squint effect (BSE) cannot be ignored. In this case, localization performance will be affected when an inaccurate channel model deviating from the true model is adopted. In this work, we employ the MCRB (misspecified Cram\'er-Rao lower bound) to lower bound the localization error using a simplified mismatched model while the observed data is governed by a more complex true model. The simulation results show that among all the model impairments, the SNS has the least contribution, the SWM dominates when the distance is small compared to the array size, and the BSE has a more significant effect when the distance is much larger than the array size.