 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Diagonal RIS Design for Parameter Estimation With and Without Eavesdropping
May 09, 2025In this letter, we investigate the transmission of a complex-valued parameter vector from a transmitter to an intended receiver, considering both the presence and absence of an eavesdropper. The direct links from the transmitter to both the intended receiver and the eavesdropper are assumed to be blocked, and communications occur solely through cascaded channels facilitated by a beyond-diagonal reconfigurable intelligent surface (BD-RIS). While previous research has considered this system under conventional (diagonal) RIS assistance, we extend the setup to incorporate BD-RIS and quantify the resulting improvement in estimation performance at the intended receiver. This performance is measured by the trace of the Fisher information matrix (FIM), or equivalently, the average Fisher information, while simultaneously limiting the estimation capability of the eavesdropper. We propose solutions and algorithms for optimizing the BD-RIS response matrix and demonstrate their effectiveness. Numerical results reveal that the BD-RIS provides a significant enhancement in estimation quality compared to conventional diagonal RIS architectures.
Calibration in RIS-aided Integrated Sensing, Localization and Communication Systems
Sep 25, 2024



Reconfigurable intelligent surfaces (RISs) are key enablers for integrated sensing and communication (ISAC) systems in the 6G communication era. With the capability of dynamically shaping the channel, RISs can enhance communication coverage. Additionally, RISs can serve as additional anchors with high angular resolution to improve localization and sensing services in extreme scenarios. However, knowledge of anchors' states such as position, orientation, and hardware impairments are crucial for localization and sensing applications, requiring dedicated calibration, including geometry and hardware calibration. This paper provides an overview of various types of RIS calibration, their impacts, and the challenges they pose in ISAC systems.
Visible Light Positioning with Intelligent Reflecting Surfaces under Mismatched Orientations
Jul 15, 2024Accurate localization can be performed in visible light systems in non-line-of-sight (NLOS) scenarios by utilizing intelligent reflecting surfaces (IRSs), which are commonly in the form of mirror arrays with adjustable orientations. When signals transmitted from light emitting diodes (LEDs) are reflected from IRSs and collected by a receiver, the position of the receiver can be estimated based on power measurements by utilizing the known parameters of the LEDs and IRSs. Since the orientation vectors of IRS elements (mirrors) cannot be adjusted perfectly in practice, it is important to evaluate the effects of mismatches between desired and true orientations of IRS elements. In this study, we derive the misspecified Cramer-Rao lower bound (MCRB) and the mismatched maximum likelihood (MML) estimator for specifying the estimation performance and the lower bound in the presence of mismatches in IRS orientations. We also provide comparisons with the conventional maximum likelihood (ML) estimator and the CRB in absence of orientation mismatches for quantifying the effects of mismatches. It is shown that orientation mismatches can result in significant degradation in localization accuracy at high signal-to-noise ratios.
RIS-Aided NLoS Monostatic Sensing under Mobility and Angle-Doppler Coupling
Jan 12, 2024



We investigate the problem of reconfigurable intelligent surface (RIS)-aided monostatic sensing of a mobile target under line-of-sight (LoS) blockage considering a single antenna, full-duplex, and dual-functional radar-communications base station (BS). For the purpose of target detection and delay/Doppler/angle estimation, we derive a detector based on the generalized likelihood ratio test (GLRT), which entails a high-dimensional parameter search and leads to angle-Doppler coupling. To tackle these challenges, we propose a two-step algorithm for solving the GLRT detector/estimator in a low-complexity manner, accompanied by a RIS phase profile design tailored to circumvent the angle-Doppler coupling effect. Simulation results verify the effectiveness of the proposed algorithm, demonstrating its convergence to theoretical bounds and its superiority over state-of-the-art mobility-agnostic benchmarks.
Visible Light Positioning under Luminous Flux Degradation of LEDs
Dec 12, 2023The position estimation problem based on received power measurements is investigated for visible light systems in the presence of luminous flux degradation of light emitting diodes (LEDs). When the receiver is unaware of this degradation and performs position estimation accordingly, there exists a mismatch between the true model and the assumed model. For this scenario, the misspecified Cram\'er-Rao bound (MCRB) and the mismatched maximum likelihood (MML) estimator are derived to quantify the performance loss due to this model mismatch. Also, the Cram\'er-Rao lower bound (CRB) and the maximum likelihood (ML) estimator are derived when the receiver knows the degradation formula for the LEDs but does not know the decay rate parameter in that formula. In addition, in the presence of full knowledge about the degradation formula and the decay rate parameters, the CRB and the ML estimator are obtained to specify the best achievable performance. By evaluating the theoretical limits and the estimators in these three scenarios, we reveal the effects of the information about the LED degradation model and the decay rate parameters on position estimation performance. It is shown that the model mismatch can result in significant degradation in localization performance at high signal-to-noise ratios, which can be compensated by conducting joint position and decay rate parameter estimation.
Joint RIS Phase Profile Design and Power Allocation for Parameter Estimation in Presence of Eavesdropping
Sep 25, 2023



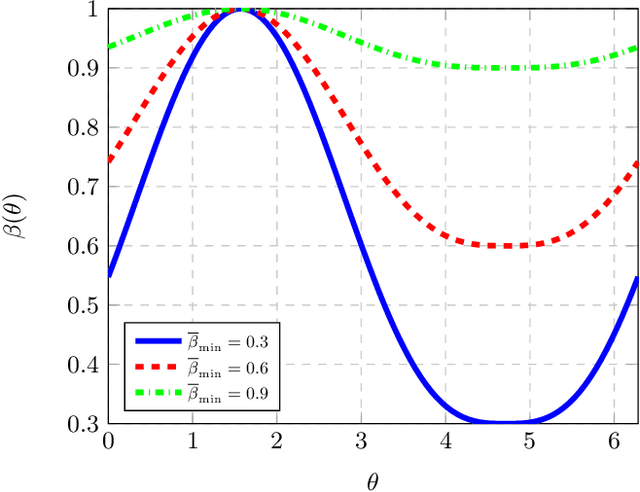
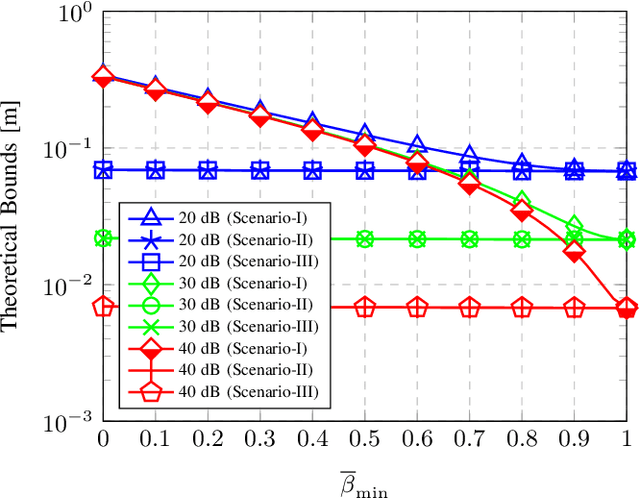
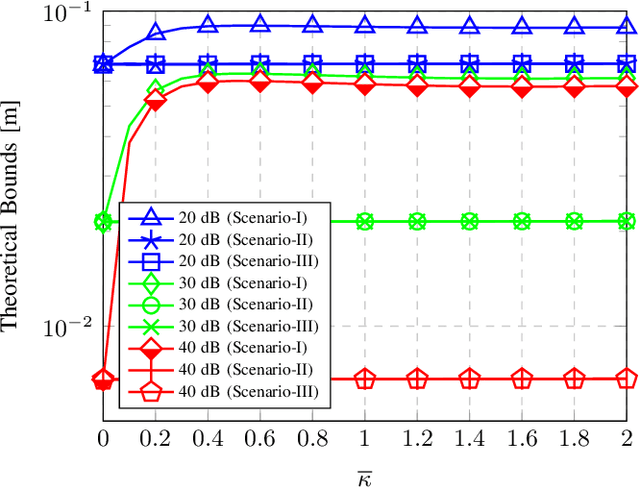
We consider secure transmission of a deterministic complex-valued parameter vector from a transmitter to an intended receiver in the presence of an eavesdropper in a reconfigurable intelligent surface (RIS)-integrated environment. We aim to jointly optimize the RIS phase profile and the power allocation matrix at the transmitter to enhance the estimation accuracy at the intended receiver while limiting that at the eavesdropper. We utilize the trace of the Fisher information matrix (FIM), equivalently, the average Fisher information, as the estimation accuracy metric, and obtain its closed form expression for the intended receiver and the eavesdropper. Accordingly, the joint RIS phase profile and power allocation problem is formulated, and it is solved via alternating optimization. When the power allocation matrix is fixed during alternating optimization, the optimal RIS phase profile design problem is formulated as a non-convex problem and it is solved via semidefinite relaxation and rank reduction. When the RIS phase profile is fixed, a linear programming formulation is obtained for optimal power allocation. Via simulations, the effects of RIS phase design and power allocation are illustrated individually and jointly. Moreover, extensions are provided by considering the presence of line of sight paths in the environment and the availability of RIS elements with adjustable magnitudes.
RIS-aided Localization under Pixel Failures
Feb 09, 2023Reconfigurable intelligent surfaces (RISs) hold great potential as one of the key technological enablers for beyond-5G wireless networks, improving localization and communication performance under line-of-sight (LoS) blockage conditions. However, hardware imperfections might cause RIS elements to become faulty, a problem referred to as pixel failures, which can constitute a major showstopper especially for localization. In this paper, we investigate the problem of RIS-aided localization of a user equipment (UE) under LoS blockage in the presence of RIS pixel failures, considering the challenging single-input single-output (SISO) scenario. We first explore the impact of such failures on accuracy through misspecified Cramer-Rao bound (MCRB) analysis, which reveals severe performance loss with even a small percentage of pixel failures. To remedy this issue, we develop two strategies for joint localization and failure diagnosis (JLFD) to detect failing pixels while simultaneously locating the UE with high accuracy. The first strategy relies on l_1-regularization through exploitation of failure sparsity. The second strategy detects the failures one-by-one by solving a multiple hypothesis testing problem at each iteration, successively enhancing localization and diagnosis accuracy. Simulation results show significant performance improvements of the proposed JLFD algorithms over the conventional failure-agnostic benchmark, enabling successful recovery of failure-induced performance degradations.
On the Impact of Hardware Impairments on RIS-aided Localization
May 25, 2022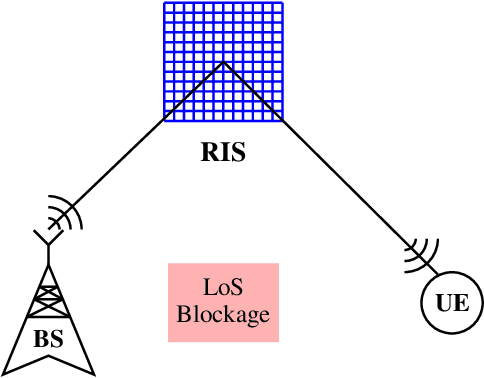
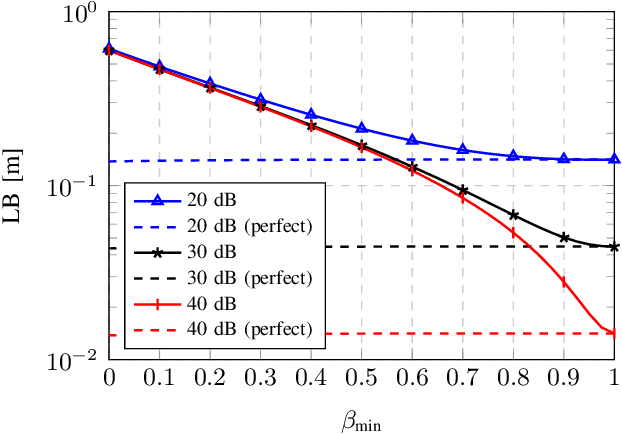
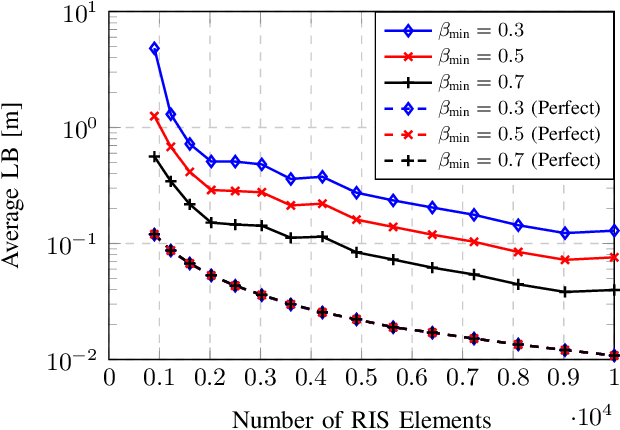
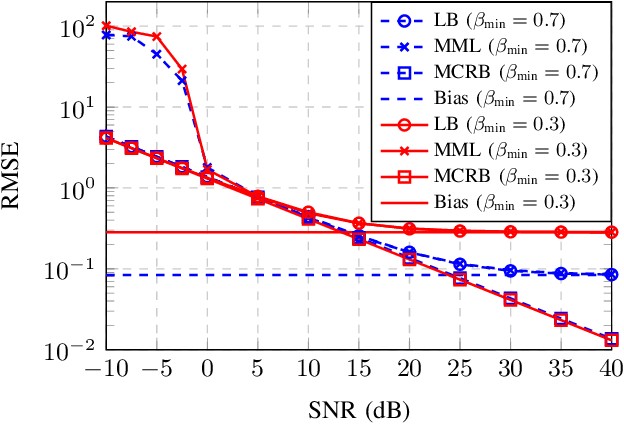
We investigate a reconfigurable intelligent surface (RIS)-aided near-field localization system with single-antenna user equipment (UE) and base station (BS) under hardware impairments by considering a practical phase-dependent RIS amplitude variations model. To analyze the localization performance under the mismatch between the practical model and the ideal model with unit-amplitude RIS elements, we employ the misspecified Cram\'{e}r-Rao bound (MCRB). Based on the MCRB derivation, the lower bound (LB) on the mean-squared error for estimation of UE position is evaluated and shown to converge to the MCRB at low signal-to-noise ratios (SNRs). Simulation results indicate more severe performance degradation due to the model misspecification with increasing SNR. In addition, the mismatched maximum likelihood (MML) estimator is derived and found to be tight to the LB in the high SNR regime. Finally, we observe that the model mismatch can lead to an order-of-magnitude localization performance loss at high SNRs.
RIS-aided Near-Field Localization under Phase-Dependent Amplitude Variations
Apr 27, 2022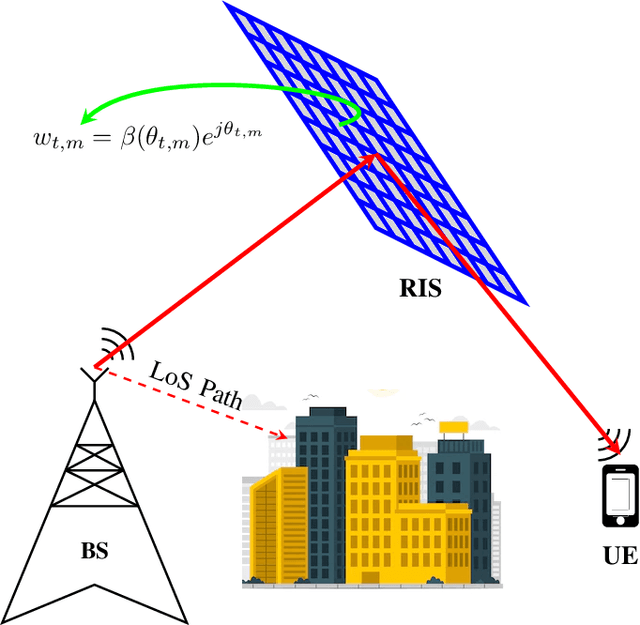
We investigate the problem of reconfigurable intelligent surface (RIS)-aided near-field localization of a user equipment (UE) served by a base station (BS) under phase-dependent amplitude variations at each RIS element. Through a misspecified Cram\'{e}r-Rao bound (MCRB) analysis and a resulting lower bound (LB) on localization, we show that when the UE is unaware of amplitude variations (i.e., assumes unit-amplitude responses), severe performance penalties can arise, especially at high signal-to-noise ratios (SNRs). Leveraging Jacobi-Anger expansion to decouple range-azimuth-elevation dimensions, we develop a low-complexity approximated mismatched maximum likelihood (AMML) estimator, which is asymptotically tight to the LB. To mitigate performance loss due to model mismatch, we propose to jointly estimate the UE location and the RIS amplitude model parameters. The corresponding Cram\'{e}r-Rao bound (CRB) is derived, as well as an iterative refinement algorithm, which employs the AMML method as a subroutine and alternatingly updates individual parameters of the RIS amplitude model. Simulation results indicate fast convergence and performance close to the CRB. The proposed method can successfully recover the performance loss of the AMML under a wide range of RIS parameters and effectively calibrate the RIS amplitude model online with the help of a user that has an a-priori unknown location.
Distance and Position Estimation in Visible Light Systems with RGB LEDs
Jun 01, 2021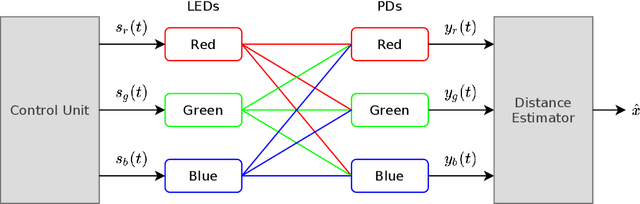
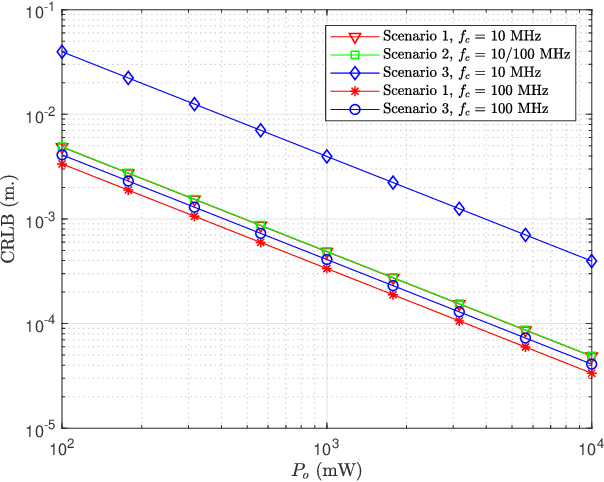
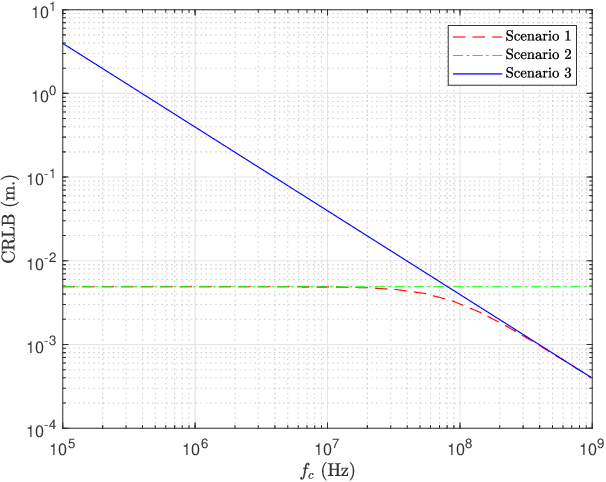
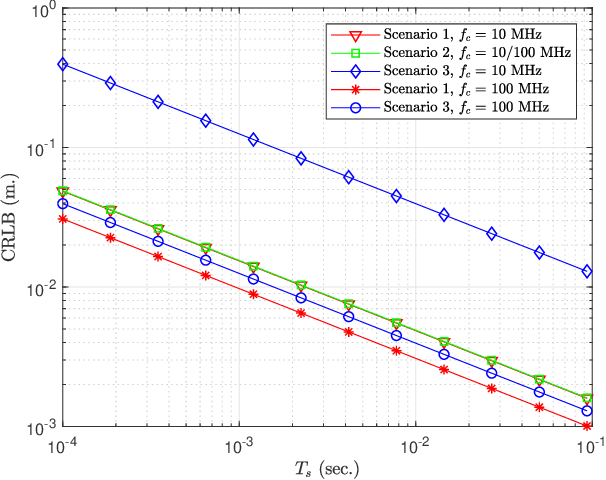
In this manuscript, distance and position estimation problems are investigated for visible light positioning (VLP) systems with red-green-blue (RGB) light emitting diodes (LEDs). The accuracy limits on distance and position estimation are calculated in terms of the Cramer-Rao lower bound (CRLB) for three different scenarios. Scenario~1 and Scenario~2 correspond to synchronous and asynchronous systems, respectively, with known channel attenuation formulas at the receiver. In Scenario~3, a synchronous system is considered but channel attenuation formulas are not known at the receiver. The derived CRLB expressions reveal the relations among distance/position estimation accuracies in the considered scenarios and lead to intuitive explanations for the benefits of using RGB LEDs. In addition, maximum likelihood (ML) estimators are derived in all scenarios, and it is shown that they can achieve close performance to the CRLBs in some cases for sufficiently high source optical powers.