 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOFDM Based Bistatic Integrated Sensing and Communication: Sensing Beyond CP Limit
May 17, 2025This work investigates a bistatic OFDM-based integrated sensing and communication (ISAC) system under a single-target scenario, considering both line-of-sight (LOS) presence and LOS blockage cases. A sliding window-based sensing receiver architecture is proposed to extend the intersymbol interference (ISI)-free sensing range beyond the cyclic prefix (CP) duration by exploiting pilot symbols embedded in the time-frequency grid. The performance of the proposed receiver is evaluated in terms of range and velocity estimation accuracy and is compared against the Cramer-Rao bounds (CRBs) for the bi-static ISAC setting. Numerical results confirm that the proposed method achieves estimation performance that closely approaches the CRBs in the high signal-to-noise ratio (SNR) regime.
Impact of the Pilot Design for OFDM Based Bi-static Integrated Sensing and Communication System
Mar 26, 2025



A bistatic milimeter-wave (mmWave) ISAC system utilizing OFDM signaling is considered. For a single-target scnenario, closed-form expressions for the Cramer-Rao bounds (CRBs) of range and velocity estimation are derived for a given pilot pattern. The analysis shows that when the target's range and velocity remain within the maximum unambiguous limits, allocating pilot symbols more frequently in time improves position estimation, while increasing their density in frequency enhances velocity estimation. Numerical results further validate that the least squares (LS) channel estimation approach closely follows CRB predictions, particularly in the high-SNR regime.
Spectral Efficiency of Low Earth Orbit Satellite Constellations
Nov 29, 2024



This paper investigates the maximum downlink spectral efficiency of low earth orbit (LEO) constellations. Spectral efficiency, in this context, refers to the sum rate of the entire network per unit spectrum per unit area on the earth's surface. For practicality all links employ single-user codebooks and treat interference as noise. To estimate the maximum achievable spectral efficiency, we propose and analyze a regular configuration, which deploys satellites and ground terminals in hexagonal lattices. Additionally, for wideband networks with arbitrary satellite configurations, we introduce a subband allocation algorithm aimed at maximizing the overall spectral efficiency. Simulation results indicate that the regular configuration is more efficient than random configurations. As the number of randomly placed satellites increases within an area, the subband allocation algorithm achieves a spectral efficiency that approaches the spectral efficiency achieved by the regular configuration. Further improvements are demonstrated by reconfiguring associations so that nearby transmitters avoid pointing to the same area.
Calibration in RIS-aided Integrated Sensing, Localization and Communication Systems
Sep 25, 2024



Reconfigurable intelligent surfaces (RISs) are key enablers for integrated sensing and communication (ISAC) systems in the 6G communication era. With the capability of dynamically shaping the channel, RISs can enhance communication coverage. Additionally, RISs can serve as additional anchors with high angular resolution to improve localization and sensing services in extreme scenarios. However, knowledge of anchors' states such as position, orientation, and hardware impairments are crucial for localization and sensing applications, requiring dedicated calibration, including geometry and hardware calibration. This paper provides an overview of various types of RIS calibration, their impacts, and the challenges they pose in ISAC systems.
Reducing Satellite Interference to Radio Telescopes Using Beacons
Dec 20, 2023



This paper proposes the transmission of beacon signals to alert potential interferers of an ongoing or impending passive sensing measurement. We focus on the interference from Low-Earth Orbiting (LEO) satellites to a radio-telescope. We compare the beacon approach with two versions of Radio Quiet Zones (RQZs): fixed quiet zones on the ground and in the sky, and dynamic quiet zones that vary across satellites. The beacon-assisted approach can potentially exploit channel reciprocity, which accounts for short-term channel variations between the satellite and radio telescope. System considerations associated with beacon design and potential schemes for beacon transmission are discussed. The probability of excessive Radio Frequency Interference (RFI) at the radio telescope (outage probability) and the fraction of active links in the satellite network are used as performance metrics. Numerical simulations compare the performance of the approaches considered, and show that the beacon approach enables more active satellite links relative to quiet zones for a given outage probability.
RIS-aided Localization under Pixel Failures
Feb 09, 2023Reconfigurable intelligent surfaces (RISs) hold great potential as one of the key technological enablers for beyond-5G wireless networks, improving localization and communication performance under line-of-sight (LoS) blockage conditions. However, hardware imperfections might cause RIS elements to become faulty, a problem referred to as pixel failures, which can constitute a major showstopper especially for localization. In this paper, we investigate the problem of RIS-aided localization of a user equipment (UE) under LoS blockage in the presence of RIS pixel failures, considering the challenging single-input single-output (SISO) scenario. We first explore the impact of such failures on accuracy through misspecified Cramer-Rao bound (MCRB) analysis, which reveals severe performance loss with even a small percentage of pixel failures. To remedy this issue, we develop two strategies for joint localization and failure diagnosis (JLFD) to detect failing pixels while simultaneously locating the UE with high accuracy. The first strategy relies on l_1-regularization through exploitation of failure sparsity. The second strategy detects the failures one-by-one by solving a multiple hypothesis testing problem at each iteration, successively enhancing localization and diagnosis accuracy. Simulation results show significant performance improvements of the proposed JLFD algorithms over the conventional failure-agnostic benchmark, enabling successful recovery of failure-induced performance degradations.
On the Impact of Hardware Impairments on RIS-aided Localization
May 25, 2022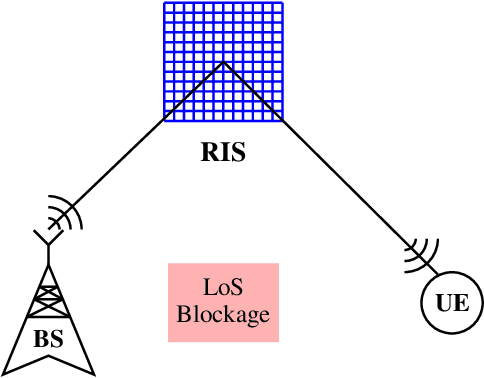
We investigate a reconfigurable intelligent surface (RIS)-aided near-field localization system with single-antenna user equipment (UE) and base station (BS) under hardware impairments by considering a practical phase-dependent RIS amplitude variations model. To analyze the localization performance under the mismatch between the practical model and the ideal model with unit-amplitude RIS elements, we employ the misspecified Cram\'{e}r-Rao bound (MCRB). Based on the MCRB derivation, the lower bound (LB) on the mean-squared error for estimation of UE position is evaluated and shown to converge to the MCRB at low signal-to-noise ratios (SNRs). Simulation results indicate more severe performance degradation due to the model misspecification with increasing SNR. In addition, the mismatched maximum likelihood (MML) estimator is derived and found to be tight to the LB in the high SNR regime. Finally, we observe that the model mismatch can lead to an order-of-magnitude localization performance loss at high SNRs.
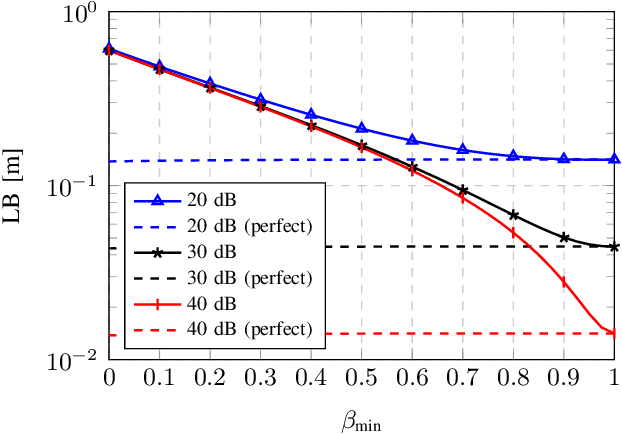
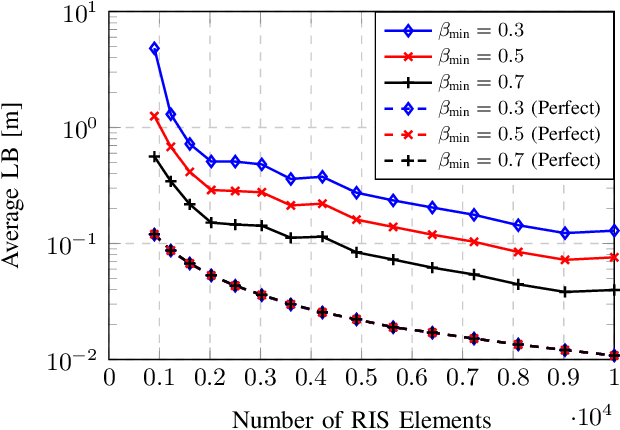
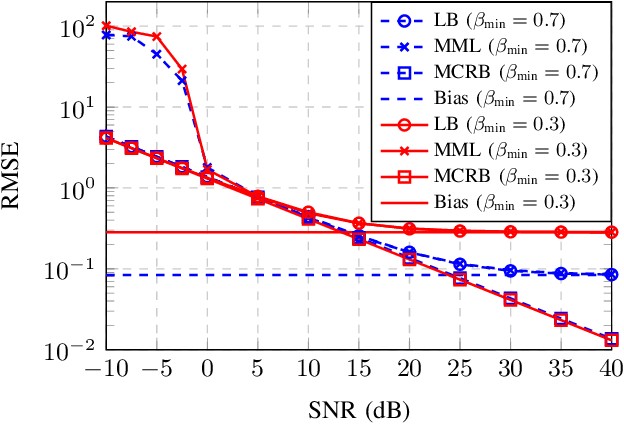
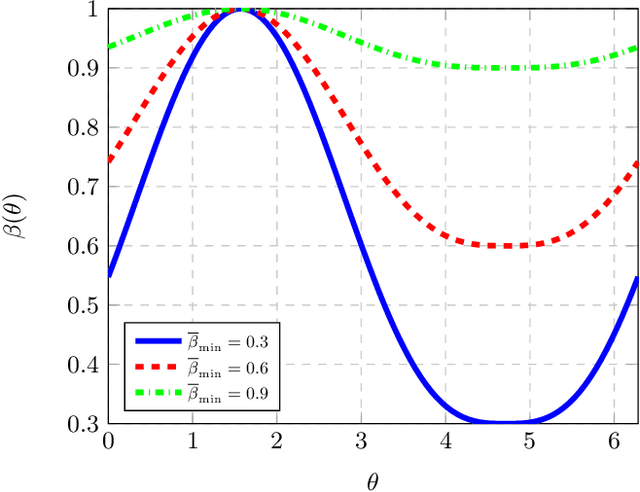
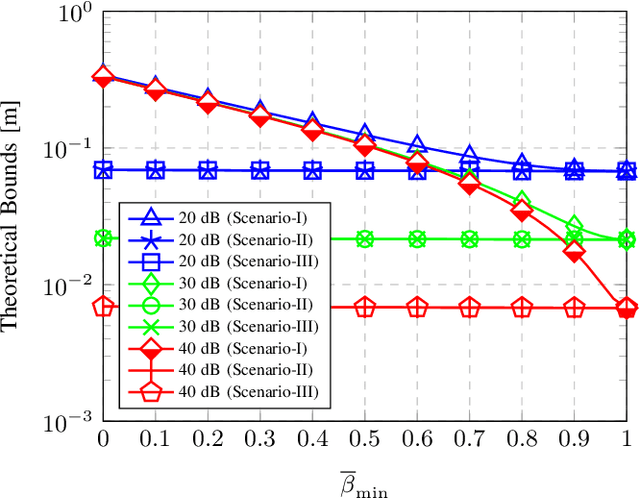
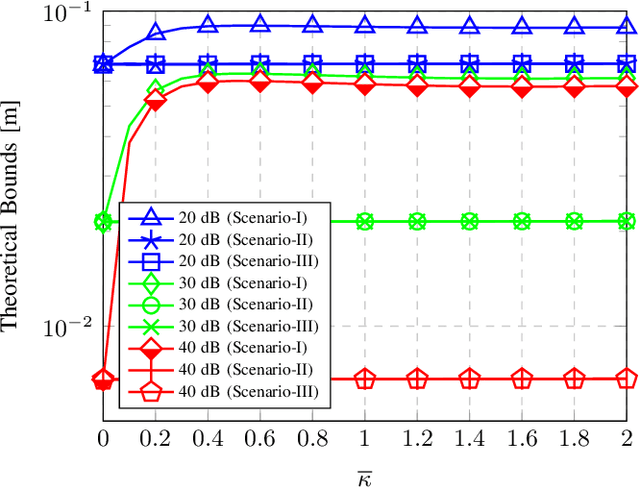
RIS-aided Near-Field Localization under Phase-Dependent Amplitude Variations
Apr 27, 2022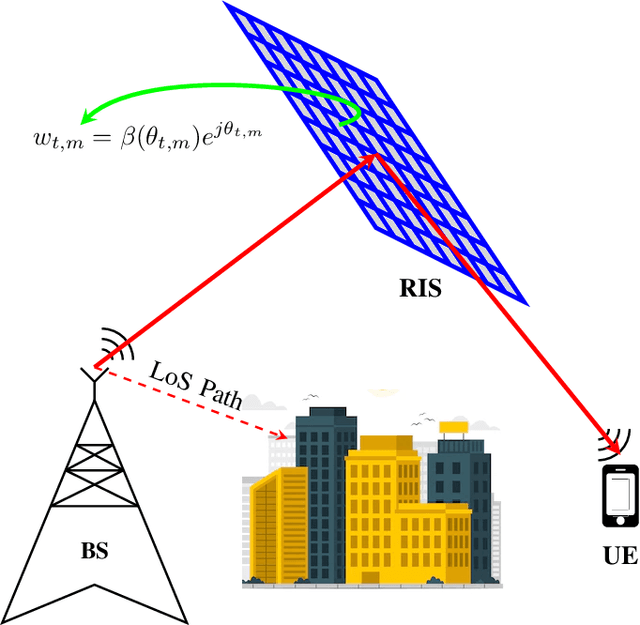
We investigate the problem of reconfigurable intelligent surface (RIS)-aided near-field localization of a user equipment (UE) served by a base station (BS) under phase-dependent amplitude variations at each RIS element. Through a misspecified Cram\'{e}r-Rao bound (MCRB) analysis and a resulting lower bound (LB) on localization, we show that when the UE is unaware of amplitude variations (i.e., assumes unit-amplitude responses), severe performance penalties can arise, especially at high signal-to-noise ratios (SNRs). Leveraging Jacobi-Anger expansion to decouple range-azimuth-elevation dimensions, we develop a low-complexity approximated mismatched maximum likelihood (AMML) estimator, which is asymptotically tight to the LB. To mitigate performance loss due to model mismatch, we propose to jointly estimate the UE location and the RIS amplitude model parameters. The corresponding Cram\'{e}r-Rao bound (CRB) is derived, as well as an iterative refinement algorithm, which employs the AMML method as a subroutine and alternatingly updates individual parameters of the RIS amplitude model. Simulation results indicate fast convergence and performance close to the CRB. The proposed method can successfully recover the performance loss of the AMML under a wide range of RIS parameters and effectively calibrate the RIS amplitude model online with the help of a user that has an a-priori unknown location.