 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-Static Sensing for Near-Field RIS Localization
Jun 28, 2022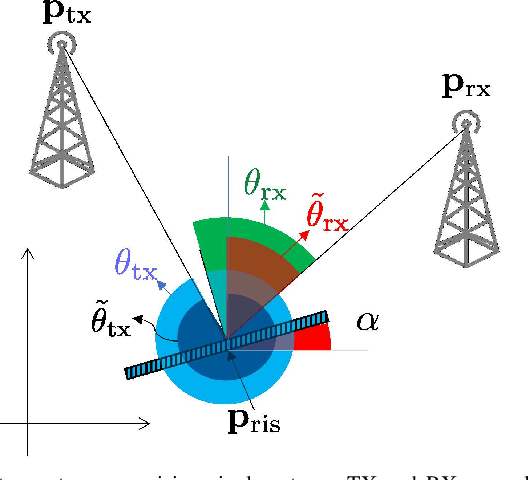
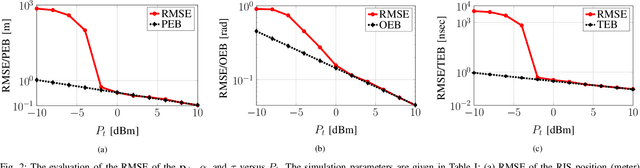
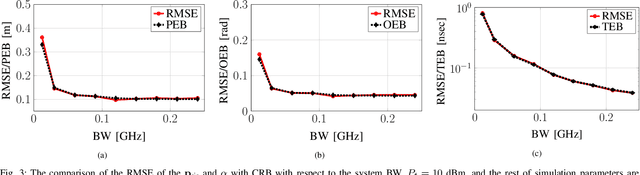
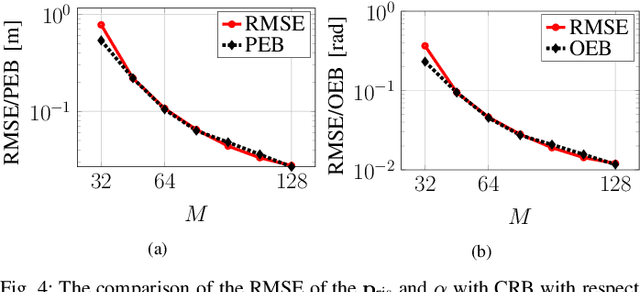
We address the localization of a reconfigurable intelligent surface (RIS) for a single-input single-output multi-carrier system using bi-static sensing between a fixed transmitter and a fixed receiver. Due to the deployment of RISs with a large dimension, near-field (NF) scenarios are likely to occur, especially for indoor applications, and are the focus of this work. We first derive the Cramer-Rao bounds (CRBs) on the estimation error of the RIS position and orientation and the time of arrival (TOA) for the path transmitter-RIS-receiver. We propose a multi-stage low-complexity estimator for RIS localization purposes. In this proposed estimator, we first perform a line search to estimate the TOA. Then, we use the far-field approximation of the NF signal model to implicitly estimate the angle of arrival and the angle of departure at the RIS center. Finally, the RIS position and orientation estimate are refined via a quasi-Newton method. Simulation results reveal that the proposed estimator can attain the CRBs. We also investigate the effects of several influential factors on the accuracy of the proposed estimator like the RIS size, transmitted power, system bandwidth, and RIS position and orientation.