 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneration-Agnostic Zero-Energy Devices for Sustainable Connectivity, Sensing, and Localization
Nov 12, 2025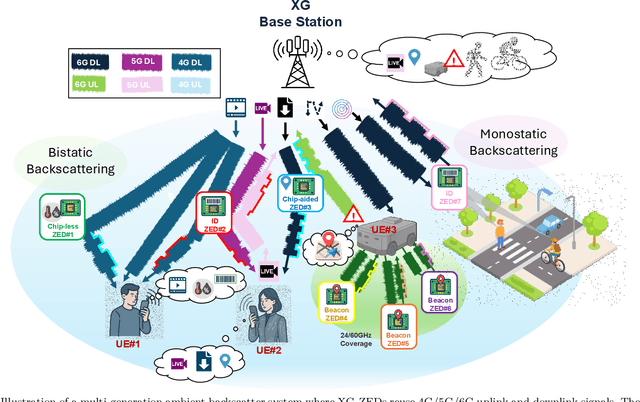
The massive scale of Internet of Things (IoT) connectivity expected in 6G networks raises unprecedented challenges in energy use, battery waste, and lifecycle sustainability. Current cellular IoT solutions remain bound to the lifetime of underlying network generations and rely on billions of disposable batteries, creating unsustainable economic and environmental costs. This article proposes generation-agnostic zero-energy devices (XG-ZEDs), a new class of backscatter based IoT devices that are battery-less, spectrum-agnostic, and future-proof across successive network generations. XG-ZEDs exploit existing ambient wireless signals for communication, sensing, and localization, transforming infrastructure and user devices into universal enablers of ultra-low-power connectivity. We review architectural classifications, communication protocols, network integration, and representative applications such as sensing, localization, and radio-SLAM, while outlining the challenges ahead.
On Performance of FAS-aided Covert Communications
Feb 27, 2025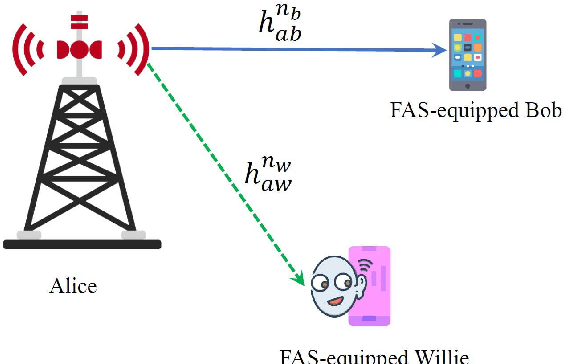
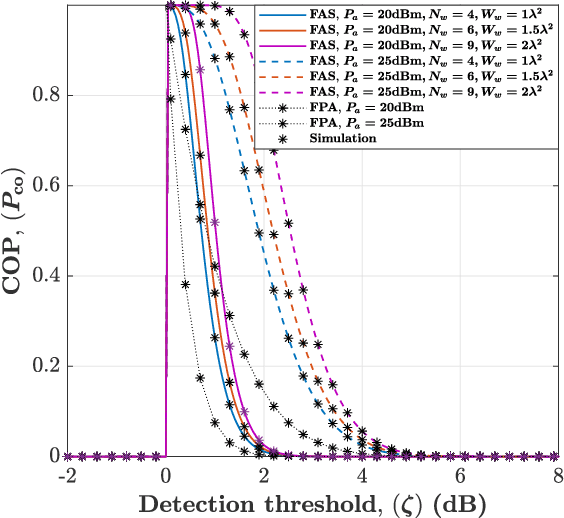
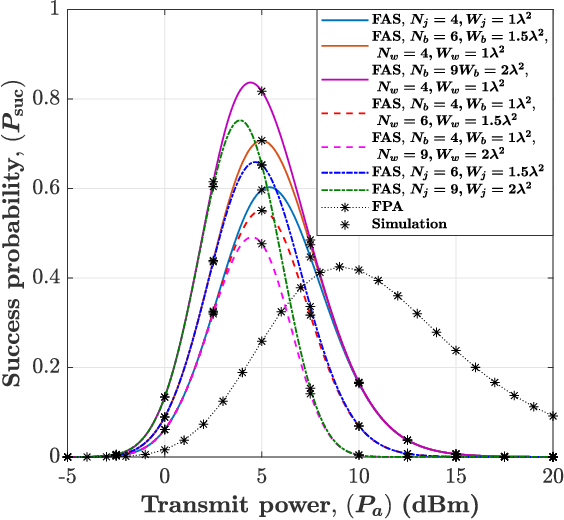
This paper investigates the impact of deploying the fluid antenna system (FAS) on the performance of covert communications. In particular, we focus on a scenario where a transmitter seeks to covertly communicate with a receiver, while a warden attempts to detect the transmission. Both the receiver and the warden are assumed to utilize planar FAS. We derive compact analytical expressions for the covertness outage probability (COP), defined as the complement of the sum of false alarm (FA) and missed detection (MD) probabilities. By determining the optimal detection threshold that maximizes the COP, we characterize the success probability for the legitimate transmission, highlighting the trade-off between covertness and transmission success. Our numerical results confirm that while deploying FAS at the warden enhances its detection ability compared to fixed-position antennas (FPAs), equipping the receiver with FAS rather than FPAs significantly improves reception quality, leading to more reliable transmission.
Physical Layer Security in FAS-aided Wireless Powered NOMA Systems
Jan 15, 2025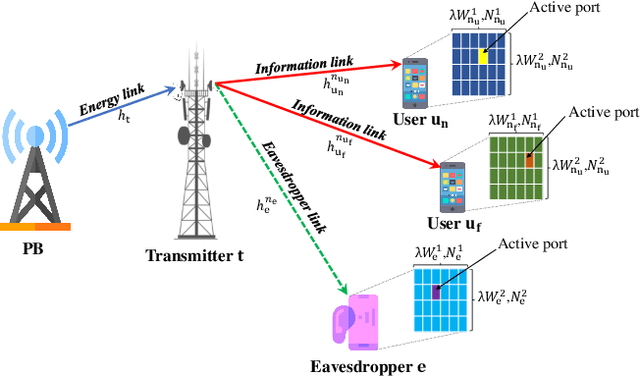
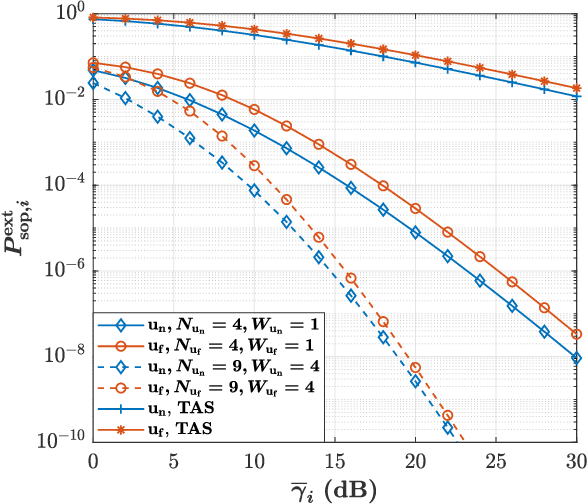
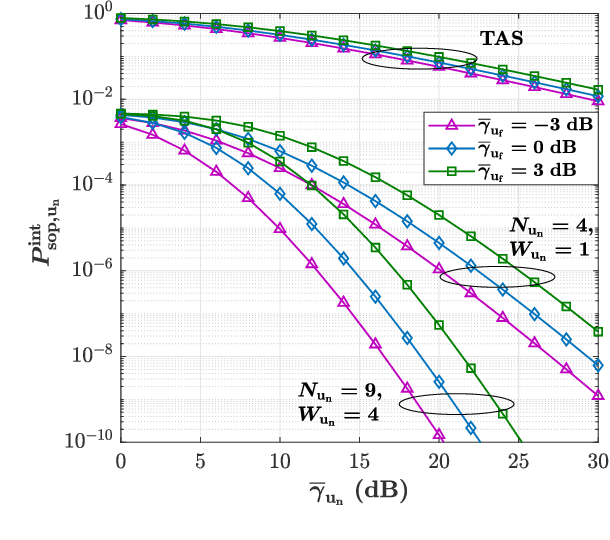
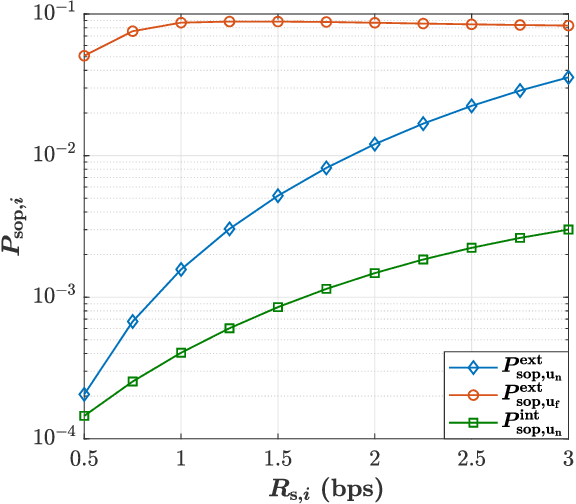
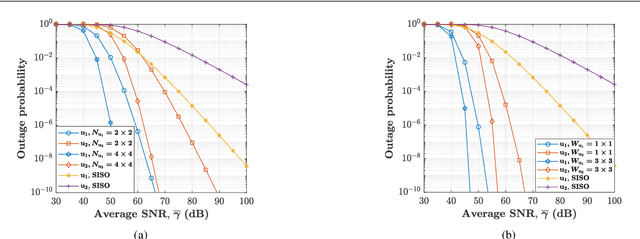
The rapid evolution of communication technologies and the emergence of sixth-generation (6G) networks have introduced unprecedented opportunities for ultra-reliable, low-latency, and energy-efficient communication. However, the integration of advanced technologies like non-orthogonal multiple access (NOMA) and wireless powered communication networks (WPCNs) brings significant challenges, particularly in terms of energy constraints and security vulnerabilities. Traditional antenna systems and orthogonal multiple access schemes struggle to meet the increasing demands for performance and security in such environments. To address this gap, this paper investigates the impact of emerging fluid antenna systems (FAS) on the performance of physical layer security (PLS) in WPCNs. Specifically, we consider a scenario in which a transmitter, powered by a power beacon via an energy link, transmits confidential messages to legitimate FAS-aided users over information links while an external eavesdropper attempts to decode the transmitted signals. Additionally, users leverage the NOMA scheme, where the far user may also act as an internal eavesdropper. For the proposed model, we first derive the distributions of the equivalent channels at each node and subsequently obtain compact expressions for the secrecy outage probability (SOP) and average secrecy capacity (ASC), using the Gaussian quadrature methods. Our results reveal that incorporating the FAS for NOMA users, instead of the TAS, enhances the performance of the proposed secure WPCN.
Movable Antenna-Equipped UAV for Data Collection in Backscatter Sensor Networks: A Deep Reinforcement Learning-based Approach
Nov 21, 2024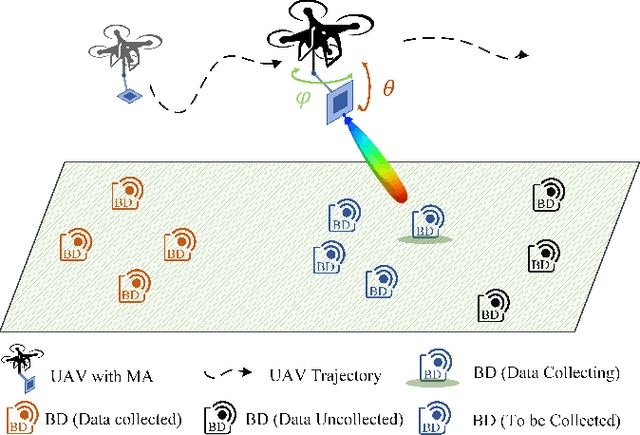
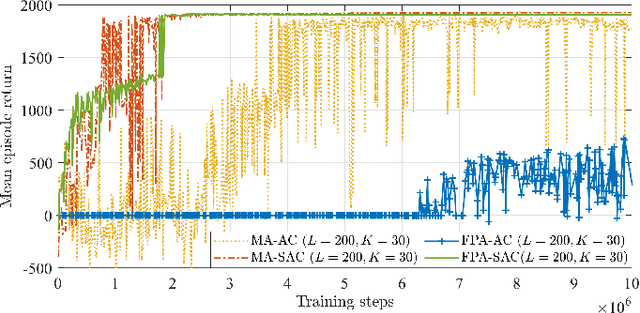
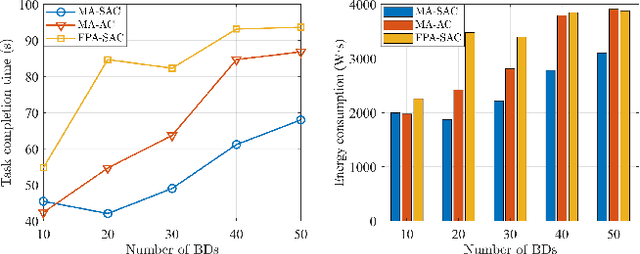

Backscatter communication (BC) becomes a promising energy-efficient solution for future wireless sensor networks (WSNs). Unmanned aerial vehicles (UAVs) enable flexible data collection from remote backscatter devices (BDs), yet conventional UAVs rely on omni-directional fixed-position antennas (FPAs), limiting channel gain and prolonging data collection time. To address this issue, we consider equipping a UAV with a directional movable antenna (MA) with high directivity and flexibility. The MA enhances channel gain by precisely aiming its main lobe at each BD, focusing transmission power for efficient communication. Our goal is to minimize the total data collection time by jointly optimizing the UAV's trajectory and the MA's orientation. We develop a deep reinforcement learning (DRL)-based strategy using the azimuth angle and distance between the UAV and each BD to simplify the agent's observation space. To ensure stability during training, we adopt Soft Actor-Critic (SAC) algorithm that balances exploration with reward maximization for efficient and reliable learning. Simulation results demonstrate that our proposed MA-equipped UAV with SAC outperforms both FPA-equipped UAVs and other RL methods, achieving significant reductions in both data collection time and energy consumption.
RIS-Aided Backscattering Tag-to-Tag Networks: Performance Analysis
Aug 29, 2024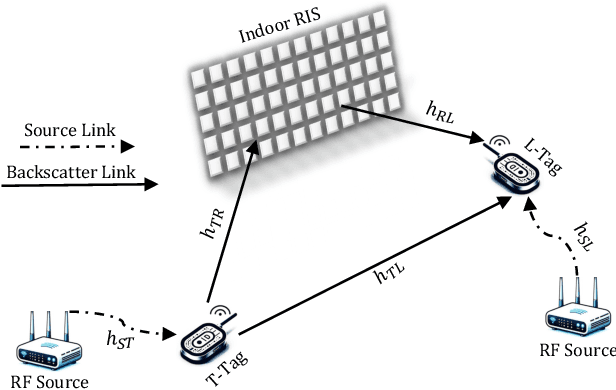
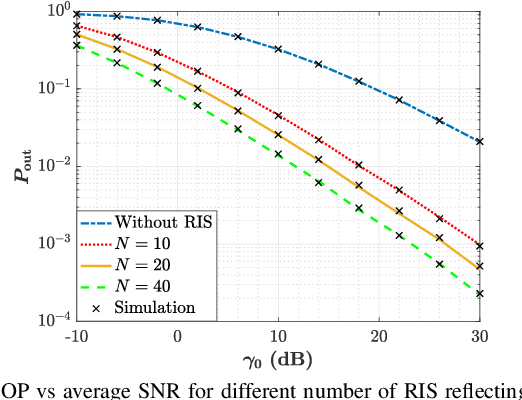
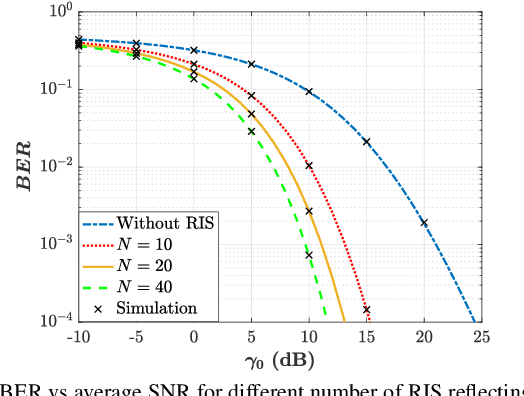
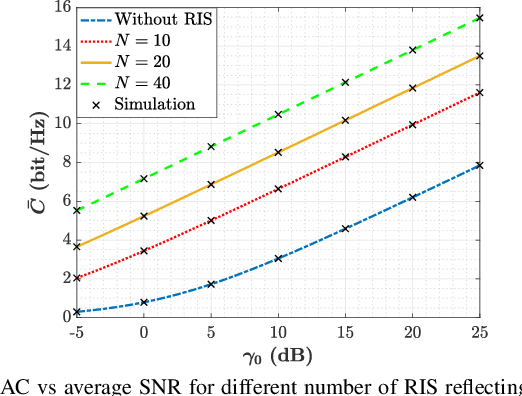
Backscattering tag-to-tag networks (BTTNs) represent a passive radio frequency identification (RFID) system that enables direct communication between tags within an external radio frequency (RF) field. However, low spectral efficiency and short-range communication capabilities, along with the ultra-low power nature of the tags, create significant challenges for reliable and practical applications of BTTNs. To address these challenges, this paper introduces integrating an indoor reconfigurable intelligent surface (RIS) into BTTN and studying RIS's impact on the system's performance. To that end, we first derive compact analytical expressions of the probability density function (PDF) and cumulative distribution function (CDF) for the received signal-to-noise ratio (SNR) at the receiver tag by exploiting the moment matching technique. Then, based on the derived PDF and CDF, we further derive analytical expressions of outage probability (OP), bit error rate (BER), and average capacity (AC) rate. Eventually, the Monte Carlo simulation is used to validate the accuracy of the analytical results, revealing that utilizing RIS can greatly improve the performance of BTTNs in terms of AC, BER, OP, and coverage region relative to traditional BTTNs setups that do not incorporate RIS.
On Performance of FAS-aided Wireless Powered NOMA Communication Systems
May 19, 2024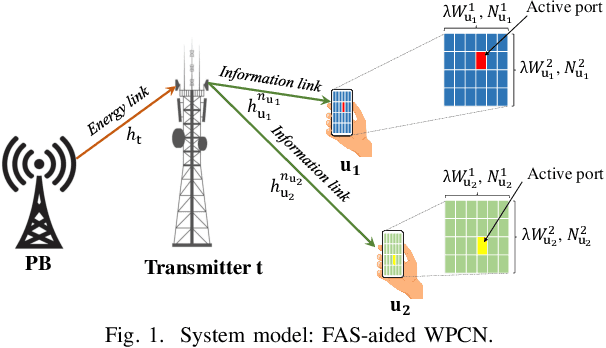
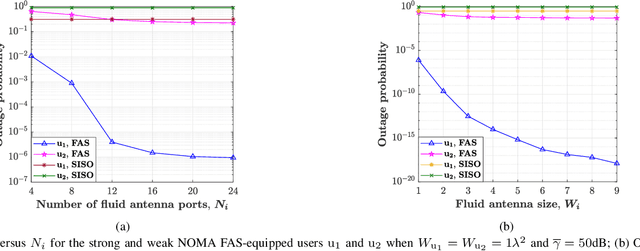
This paper studies the performance of a wireless powered communication network (WPCN) under the non-orthogonal multiple access (NOMA) scheme, where users take advantage of an emerging fluid antenna system (FAS). More precisely, we consider a scenario where a transmitter is powered by a remote power beacon (PB) to send information to the planar NOMA FAS-equipped users through Rayleigh fading channels. After introducing the distribution of the equivalent channel coefficients to the users, we derive compact analytical expressions for the outage probability (OP) in order to evaluate the system performance. Additionally, we present asymptotic OP in the high signal-to-noise ratio (SNR) regime. Eventually, results reveal that deploying the FAS with only one activated port in NOMA users can significantly enhance the WPCN performance compared with using traditional antenna systems (TAS).
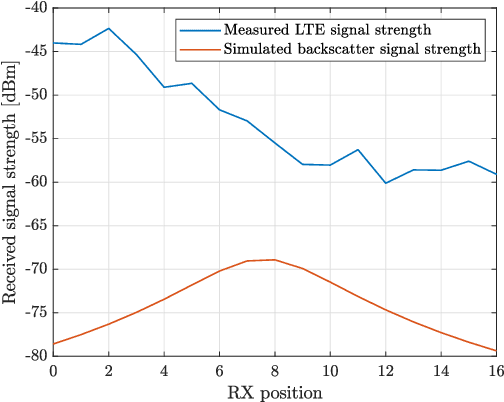
Coded Backscattering Communication with LTE Pilots as Ambient Signal
Feb 21, 2024



The 3GPP has recently conducted a study on the Ambient Internet of Things (AIoT), with a particular emphasis on examining backscatter communications as one of the primary techniques under consideration. Previous investigations into Ambient Backscatter Communications (AmBC) within the long term evolution (LTE) downlink have shown that it is feasible to utilize the user equipment channel estimator as a receiver for demodulating frequency shift keyed (FSK) messages transmitted by the backscatter devices. In practical deployment scenarios, the backscattered link often experiences a low signal-to-noise ratio, leading to subpar bit error rate (BER) performance in the case of uncoded transmissions. In this paper, we propose the adoption of the same convolutional coding methodology for backscatter links that is already employed for LTE downlink control signals. This approach facilitates the reuse of identical demodulation functions at the modem for both control signals and backscattered AIoT messages. To assess the performance of the proposed scheme, we conducted experiments utilizing real LTE downlink signals generated by a mobile operator within an office environment. When compared to uncoded FSK, convolutional channel coding delivers a notable gain of approximately 6 dB at a BER of $10^{-3}$. Consequently, the AmBC system demonstrates a high level of reliability, achieving a BER of $10^{-3}$ at a Signal-to-Noise Ratio (SNR) of 5 dB.
Multi-Agent Reinforcement Learning for Offloading Cellular Communications with Cooperating UAVs
Feb 05, 2024Effective solutions for intelligent data collection in terrestrial cellular networks are crucial, especially in the context of Internet of Things applications. The limited spectrum and coverage area of terrestrial base stations pose challenges in meeting the escalating data rate demands of network users. Unmanned aerial vehicles, known for their high agility, mobility, and flexibility, present an alternative means to offload data traffic from terrestrial BSs, serving as additional access points. This paper introduces a novel approach to efficiently maximize the utilization of multiple UAVs for data traffic offloading from terrestrial BSs. Specifically, the focus is on maximizing user association with UAVs by jointly optimizing UAV trajectories and users association indicators under quality of service constraints. Since, the formulated UAVs control problem is nonconvex and combinatorial, this study leverages the multi agent reinforcement learning framework. In this framework, each UAV acts as an independent agent, aiming to maintain inter UAV cooperative behavior. The proposed approach utilizes the finite state Markov decision process to account for UAVs velocity constraints and the relationship between their trajectories and state space. A low complexity distributed state action reward state action algorithm is presented to determine UAVs optimal sequential decision making policies over training episodes. The extensive simulation results validate the proposed analysis and offer valuable insights into the optimal UAV trajectories. The derived trajectories demonstrate superior average UAV association performance compared to benchmark techniques such as Q learning and particle swarm optimization.
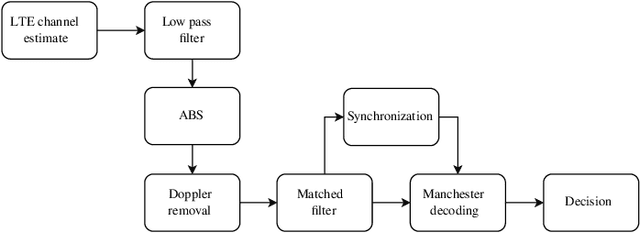
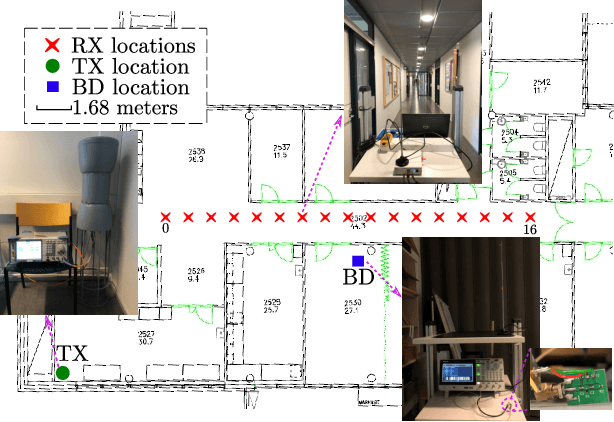
Ambient FSK Backscatter Communications using LTE Cell Specific Reference Signals
Jan 31, 2023Long Term Evolution (LTE) signal is ubiquitously present in electromagnetic (EM) background environment, which make it an attractive signal source for the ambient backscatter communications (AmBC). In this paper, we propose a system, in which a backscatter device (BD) introduces artificial Doppler shift to the channel which is larger than the natural Doppler but still small enough such that it can be tracked by the channel estimator at the User Equipment (UE). Channel estimation is done using the downlink cell specific reference signals (CRS) that are present regardless the UE being attached to the network or not. FSK was selected due to its robust operation in a fading channel. We describe the whole AmBC system, use two receivers. Finally, numerical simulations and measurements are provided to validate the proposed FSK AmBC performance.
Ambient backscatter communications using LTE cell specific reference signals
Sep 02, 2022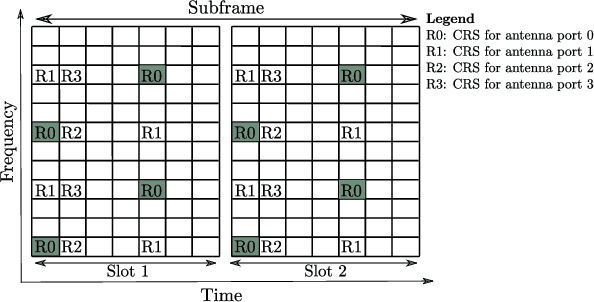
Long Term Evolution (LTE) systems provide ubiquitous coverage for mobile communications, which makes it a promising candidate to be used as a signal source in the ambient backscatter communications. In this paper, we propose a system in which a backscatter device modulates the ambient LTE signal by changing its reflection coefficient and the receiver uses the LTE Cell Specific Reference Signals (CRS) to estimate the channel and demodulates the backscattered signal from the obtained channel impulse response estimates. We first outline the overall system, discuss the receiver operation, and then provide experimental evidence on the practicality of the proposed system.