 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Fluid Antenna Sampling for Channel Estimation in Cell-Free Massive MIMO
Feb 18, 2026In this letter, we develop a continuous fluid antenna (FA) framework for uplink channel estimation in cell-free massive multiple-input and multiple-output (CF-mMIMO) systems. By modeling the wireless channel as a spatially correlated Gaussian random field, channel estimation is formulated as a Gaussian process (GP) regression problem with motion-constrained spatial sampling. Closed-form expressions for the linear minimum mean squared error (LMMSE) estimator and the corresponding estimation error are derived. A fundamental comparison with discrete port-based architectures is established under identical position constraints, showing that continuous FA sampling achieves equal or lower estimation error for any finite pilot budget, with strict improvement for non-degenerate spatial correlation models. Numerical results validate the analysis and show the performance gains of continuous FA sampling over discrete baselines.
UAV-Relay Assisted RSMA Fluid Antenna System: Outage Probability Analysis
Mar 20, 2025This letter studies the impact of fluid antenna system (FAS) technology on the performance of unmanned aerial vehicle (UAV)-assisted multiuser communication networks. Specifically, we consider a scenario where a fixed-position antenna (FPA) base station (BS) serves K FAS-equipped users with the assistance of a UAV acting as an aerial relay. The BS employs rate-splitting multiple access (RSMA), while the UAV operates in half-duplex (HD) mode using the decode-and-forward (DF) strategy. For this system, we derive a compact analytical expression for the outage probability (OP) and its asymptotic behavior in the high signal-to-noise ratio (SNR) regime, leveraging the multivariate t-distribution. Our results show how deploying FAS at ground users (GUs) in UAV-aided communications improves overall system performance compared to using FPA GUs.
Physical Layer Security in FAS-aided Wireless Powered NOMA Systems
Jan 15, 2025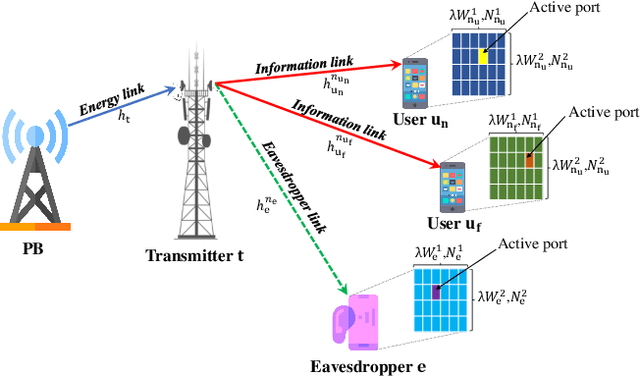
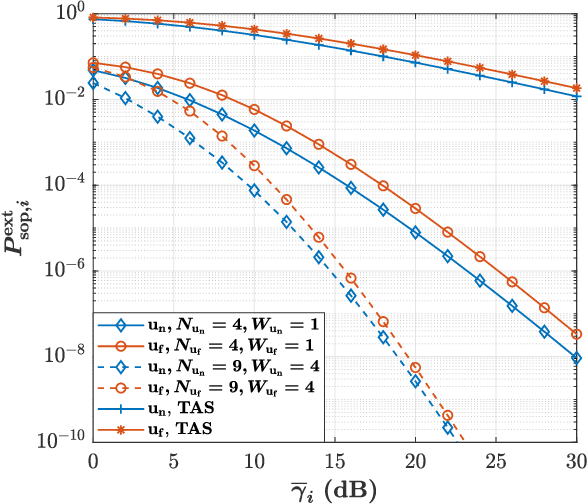
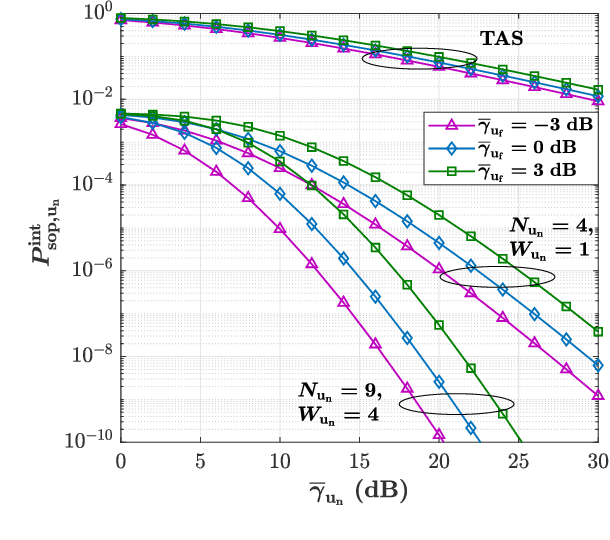
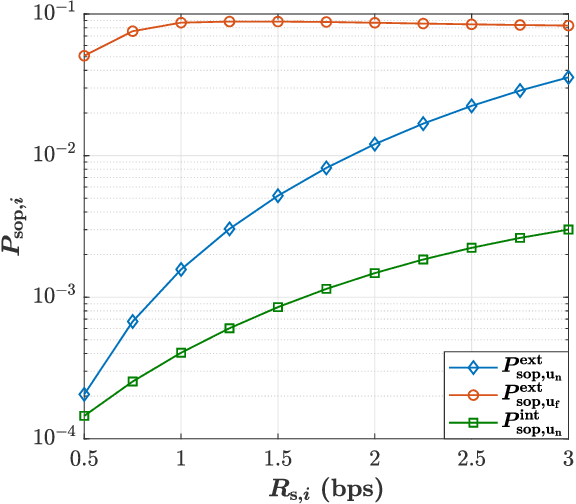
The rapid evolution of communication technologies and the emergence of sixth-generation (6G) networks have introduced unprecedented opportunities for ultra-reliable, low-latency, and energy-efficient communication. However, the integration of advanced technologies like non-orthogonal multiple access (NOMA) and wireless powered communication networks (WPCNs) brings significant challenges, particularly in terms of energy constraints and security vulnerabilities. Traditional antenna systems and orthogonal multiple access schemes struggle to meet the increasing demands for performance and security in such environments. To address this gap, this paper investigates the impact of emerging fluid antenna systems (FAS) on the performance of physical layer security (PLS) in WPCNs. Specifically, we consider a scenario in which a transmitter, powered by a power beacon via an energy link, transmits confidential messages to legitimate FAS-aided users over information links while an external eavesdropper attempts to decode the transmitted signals. Additionally, users leverage the NOMA scheme, where the far user may also act as an internal eavesdropper. For the proposed model, we first derive the distributions of the equivalent channels at each node and subsequently obtain compact expressions for the secrecy outage probability (SOP) and average secrecy capacity (ASC), using the Gaussian quadrature methods. Our results reveal that incorporating the FAS for NOMA users, instead of the TAS, enhances the performance of the proposed secure WPCN.
Physical Layer Security Performance of Dual RIS-aided V2V NOMA Communications
Jan 08, 2024This paper investigates the performance of physical layer security (PLS) in a vehicle-to-vehicle (V2V) communication system, where a transmitter vehicle exploits a dual reconfigurable intelligent surface (RIS) to send confidential information to legitimate receiver vehicles under the non-orthogonal multiple access (NOMA) scheme in the presence of an eavesdropper vehicle. In particular, it is assumed that an RIS is near the transmitter vehicle and another RIS is close to the receiver vehicles to provide a wider smart radio environment. Besides, we suppose that the channels between two RISs suffer from the Fisher-Snedecor F fading model. Under this scenario, we first provide the marginal distributions of equivalent channels at the legitimate receiver vehicles by exploiting the central limit theorem (CLT). Then, in order to evaluate the PLS performance of the considered secure communication system, we derive analytical expressions of the average secrecy capacity (ASC), secrecy outage probability (SOP), and secrecy energy efficiency (SEE) by using the Gauss-Laguerre quadrature and the Gaussian quadrature techniques. Moreover, to gain more insights into the secrecy performance, the asymptotic expression of the ASC is obtained. The numerical results indicate that incorporating the dual RIS in the secure V2V communication under the NOMA scheme can significantly provide ultra-reliable transmission and guarantee more secure communication for intelligent transportation systems (ITS).
Performance Analysis of RIS/STAR-IOS-aided V2V NOMA/OMA Communications over Composite Fading Channels
Sep 14, 2023This paper investigates the performance of vehicleto-vehicle (V2V) communications assisted by a reconfigurable intelligent surface (RIS) and a simultaneous transmitting and reflecting intelligent omni-surface (STAR-IOS) under nonorthogonal multiple access (NOMA) and orthogonal multiple access (OMA) schemes. In particular, we consider that the RIS is close to the transmitter vehicle while the STAR-IOS is near the receiver vehicles. In addition, we assume that the STAR-IOS exploits the energy-splitting (ES) protocol for communication and the fading channels between the RIS and STAR-IOS follow composite Fisher-Snedecor F distribution. Under such assumptions, we first use the central limit theorem (CLT) to derive the PDF and the CDF of equivalent channels at receiver vehicles, and then, we derive the closed-form expression of outage probability (OP) under NOMA/OMA scenarios. Additionally, by exploiting Jensen's inequality, we propose an upper bound of the ergodic capacity (EC), and then, we derive an analytical expression of the energy efficiency (EE) for both NOMA and OMA cases. Further, our analytical results, which are double-checked with the Monte-Carlo simulation, reveal that applying RIS/STAR-RIS in V2V communications can significantly improve the performance of intelligent transportation systems (ITS). Besides, the results indicate that considering the NOMA scheme provides better performance in terms of the OP, EC, and EE as compared with the OMA case for the considered V2V communication.
Learning to segment with limited annotations: Self-supervised pretraining with regression and contrastive loss in MRI
May 26, 2022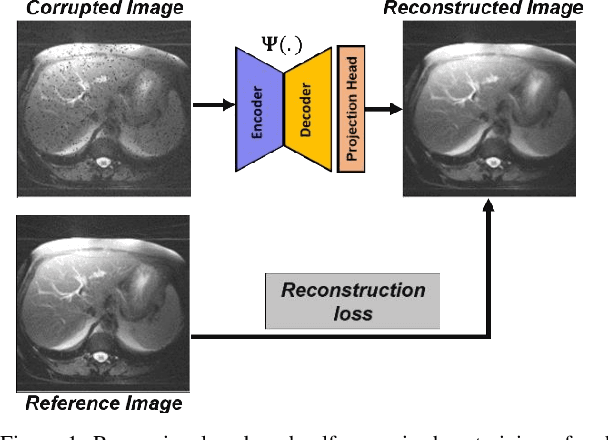
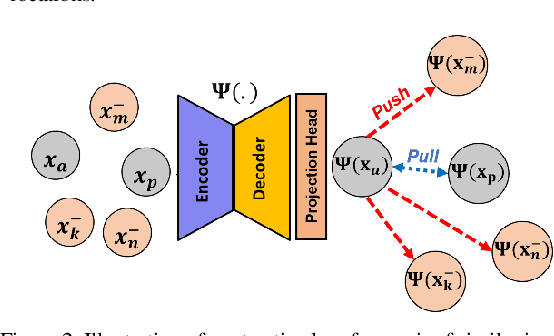
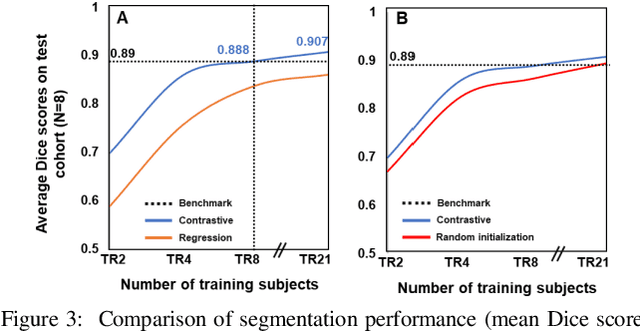
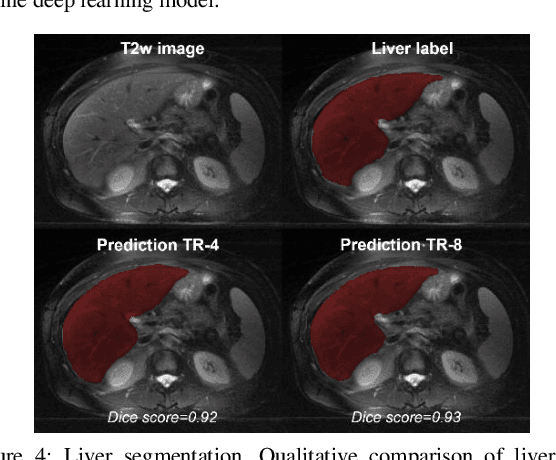
Obtaining manual annotations for large datasets for supervised training of deep learning (DL) models is challenging. The availability of large unlabeled datasets compared to labeled ones motivate the use of self-supervised pretraining to initialize DL models for subsequent segmentation tasks. In this work, we consider two pre-training approaches for driving a DL model to learn different representations using: a) regression loss that exploits spatial dependencies within an image and b) contrastive loss that exploits semantic similarity between pairs of images. The effect of pretraining techniques is evaluated in two downstream segmentation applications using Magnetic Resonance (MR) images: a) liver segmentation in abdominal T2-weighted MR images and b) prostate segmentation in T2-weighted MR images of the prostate. We observed that DL models pretrained using self-supervision can be finetuned for comparable performance with fewer labeled datasets. Additionally, we also observed that initializing the DL model using contrastive loss based pretraining performed better than the regression loss.
A Cascaded Residual UNET for Fully Automated Segmentation of Prostate and Peripheral Zone in T2-weighted 3D Fast Spin Echo Images
Dec 25, 2020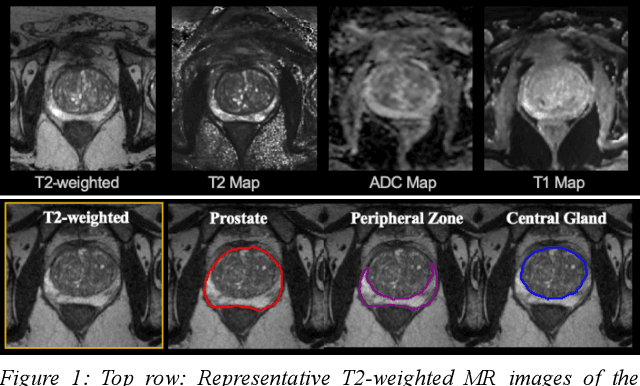
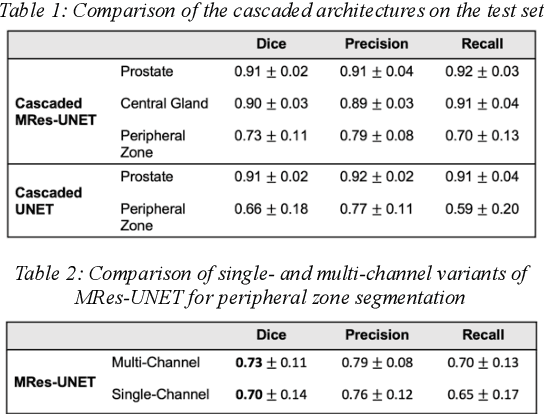
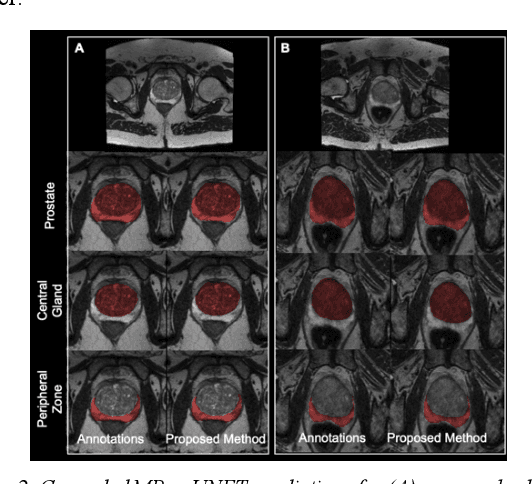
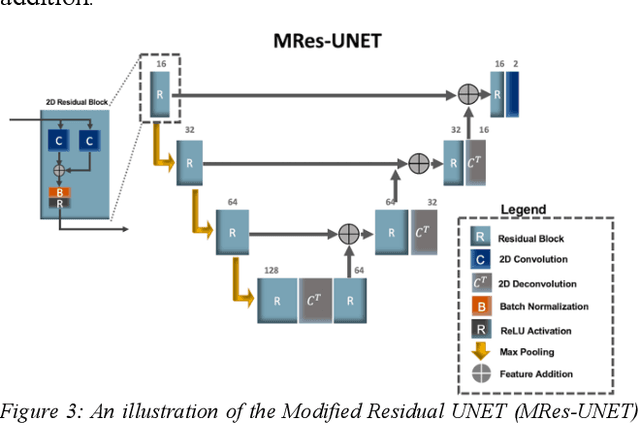
Multi-parametric MR images have been shown to be effective in the non-invasive diagnosis of prostate cancer. Automated segmentation of the prostate eliminates the need for manual annotation by a radiologist which is time consuming. This improves efficiency in the extraction of imaging features for the characterization of prostate tissues. In this work, we propose a fully automated cascaded deep learning architecture with residual blocks, Cascaded MRes-UNET, for segmentation of the prostate gland and the peripheral zone in one pass through the network. The network yields high Dice scores ($0.91\pm.02$), precision ($0.91\pm.04$), and recall scores ($0.92\pm.03$) in prostate segmentation compared to manual annotations by an experienced radiologist. The average difference in total prostate volume estimation is less than 5%.
A Comparison of Deep Learning Convolution Neural Networks for Liver Segmentation in Radial Turbo Spin Echo Images
Apr 13, 2020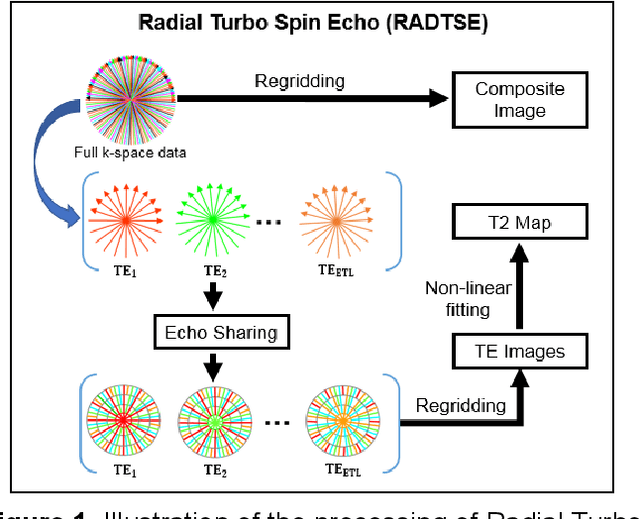
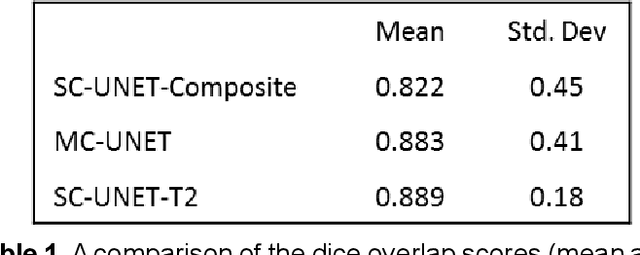
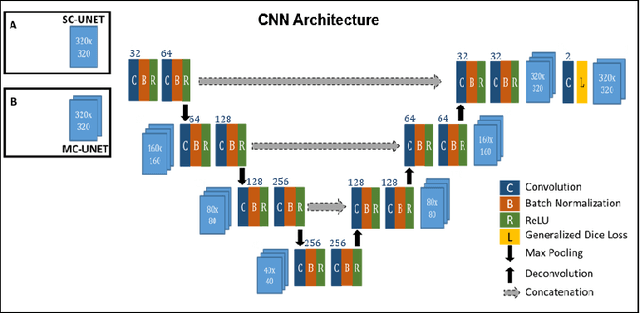
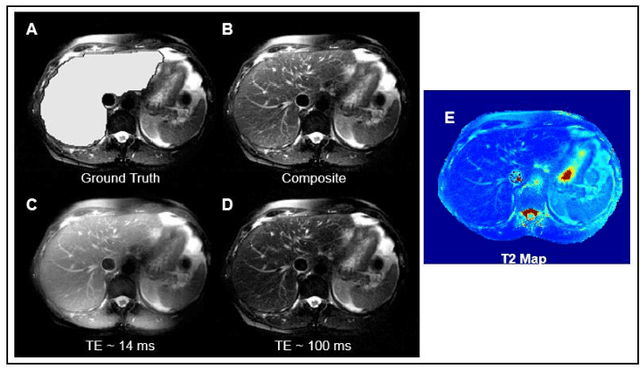
Motion-robust 2D Radial Turbo Spin Echo (RADTSE) pulse sequence can provide a high-resolution composite image, T2-weighted images at multiple echo times (TEs), and a quantitative T2 map, all from a single k-space acquisition. In this work, we use a deep-learning convolutional neural network (CNN) for the segmentation of liver in abdominal RADTSE images. A modified UNET architecture with generalized dice loss objective function was implemented. Three 2D CNNs were trained, one for each image type obtained from the RADTSE sequence. On evaluating the performance of the CNNs on the validation set, we found that CNNs trained on TE images or the T2 maps had higher average dice scores than the composite images. This, in turn, implies that the information regarding T2 variation in tissues aids in improving the segmentation performance.