 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAre you a robot? Detecting Autonomous Vehicles from Behavior Analysis
Mar 14, 2024



The tremendous hype around autonomous driving is eagerly calling for emerging and novel technologies to support advanced mobility use cases. As car manufactures keep developing SAE level 3+ systems to improve the safety and comfort of passengers, traffic authorities need to establish new procedures to manage the transition from human-driven to fully-autonomous vehicles while providing a feedback-loop mechanism to fine-tune envisioned autonomous systems. Thus, a way to automatically profile autonomous vehicles and differentiate those from human-driven ones is a must. In this paper, we present a fully-fledged framework that monitors active vehicles using camera images and state information in order to determine whether vehicles are autonomous, without requiring any active notification from the vehicles themselves. Essentially, it builds on the cooperation among vehicles, which share their data acquired on the road feeding a machine learning model to identify autonomous cars. We extensively tested our solution and created the NexusStreet dataset, by means of the CARLA simulator, employing an autonomous driving control agent and a steering wheel maneuvered by licensed drivers. Experiments show it is possible to discriminate the two behaviors by analyzing video clips with an accuracy of 80%, which improves up to 93% when the target state information is available. Lastly, we deliberately degraded the state to observe how the framework performs under non-ideal data collection conditions.
Learning to Generate Facial Depth Maps
May 30, 2018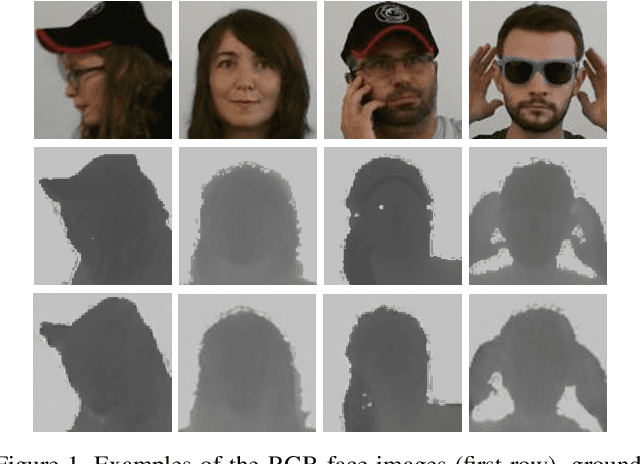
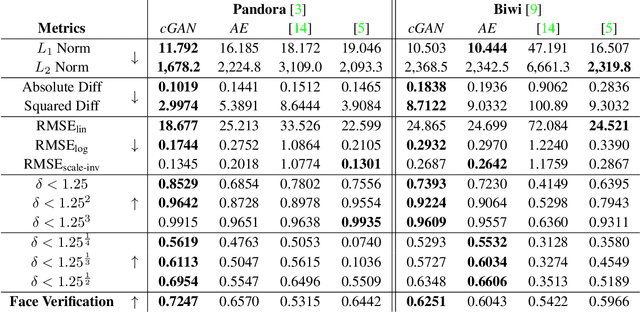
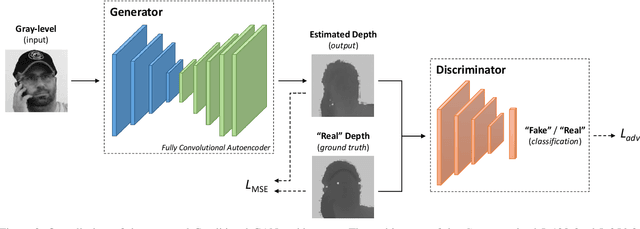
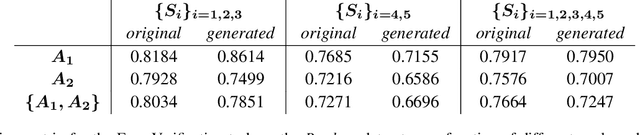
In this paper, an adversarial architecture for facial depth map estimation from monocular intensity images is presented. By following an image-to-image approach, we combine the advantages of supervised learning and adversarial training, proposing a conditional Generative Adversarial Network that effectively learns to translate intensity face images into the corresponding depth maps. Two public datasets, namely Biwi database and Pandora dataset, are exploited to demonstrate that the proposed model generates high-quality synthetic depth images, both in terms of visual appearance and informative content. Furthermore, we show that the model is capable of predicting distinctive facial details by testing the generated depth maps through a deep model trained on authentic depth maps for the face verification task.