 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAre you a robot? Detecting Autonomous Vehicles from Behavior Analysis
Mar 14, 2024



The tremendous hype around autonomous driving is eagerly calling for emerging and novel technologies to support advanced mobility use cases. As car manufactures keep developing SAE level 3+ systems to improve the safety and comfort of passengers, traffic authorities need to establish new procedures to manage the transition from human-driven to fully-autonomous vehicles while providing a feedback-loop mechanism to fine-tune envisioned autonomous systems. Thus, a way to automatically profile autonomous vehicles and differentiate those from human-driven ones is a must. In this paper, we present a fully-fledged framework that monitors active vehicles using camera images and state information in order to determine whether vehicles are autonomous, without requiring any active notification from the vehicles themselves. Essentially, it builds on the cooperation among vehicles, which share their data acquired on the road feeding a machine learning model to identify autonomous cars. We extensively tested our solution and created the NexusStreet dataset, by means of the CARLA simulator, employing an autonomous driving control agent and a steering wheel maneuvered by licensed drivers. Experiments show it is possible to discriminate the two behaviors by analyzing video clips with an accuracy of 80%, which improves up to 93% when the target state information is available. Lastly, we deliberately degraded the state to observe how the framework performs under non-ideal data collection conditions.
Unlocking Metasurface Practicality for B5G Networks: AI-assisted RIS Planning
Oct 16, 2023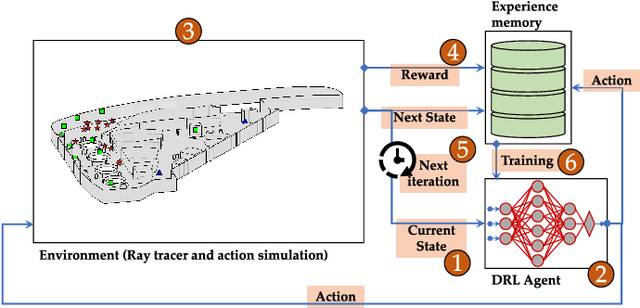
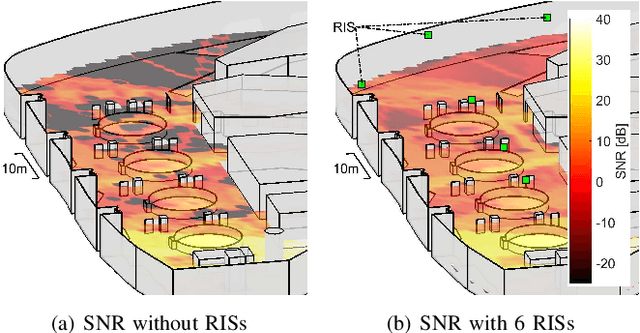
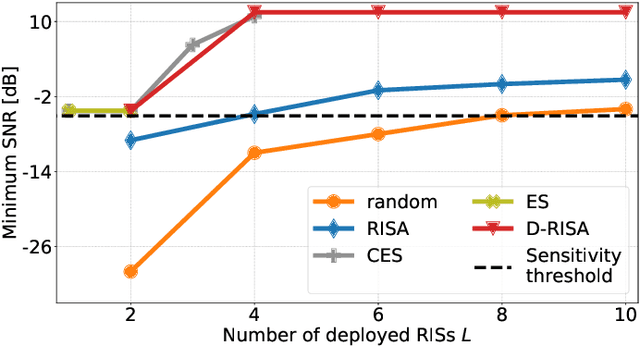
The advent of reconfigurable intelligent surfaces(RISs) brings along significant improvements for wireless technology on the verge of beyond-fifth-generation networks (B5G).The proven flexibility in influencing the propagation environment opens up the possibility of programmatically altering the wireless channel to the advantage of network designers, enabling the exploitation of higher-frequency bands for superior throughput overcoming the challenging electromagnetic (EM) propagation properties at these frequency bands. However, RISs are not magic bullets. Their employment comes with significant complexity, requiring ad-hoc deployments and management operations to come to fruition. In this paper, we tackle the open problem of bringing RISs to the field, focusing on areas with little or no coverage. In fact, we present a first-of-its-kind deep reinforcement learning (DRL) solution, dubbed as D-RISA, which trains a DRL agent and, in turn, obtain san optimal RIS deployment. We validate our framework in the indoor scenario of the Rennes railway station in France, assessing the performance of our algorithm against state-of-the-art (SOA) approaches. Our benchmarks showcase better coverage, i.e., 10-dB increase in minimum signal-to-noise ratio (SNR), at lower computational time (up to -25 percent) while improving scalability towards denser network deployments.
ARES: Autonomous RIS solution with Energy harvesting and Self-configuration towards 6G
Mar 02, 2023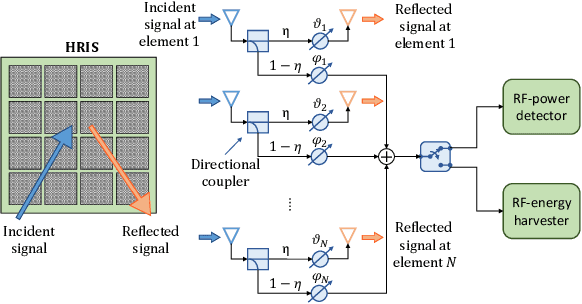



Reconfigurable Intelligent Surfaces (RISs) are expected to play a crucial role in reaching the key performance indicators (KPIs) for future 6G networks. Their competitive edge over conventional technologies lies in their ability to control the wireless environment propagation properties at will, thus revolutionizing the traditional communication paradigm that perceives the communication channel as an uncontrollable black box. As RISs transition from research to market, practical deployment issues arise. Major roadblocks for commercially viable RISs are i) the need for a fast and complex control channel to adapt to the ever-changing wireless channel conditions, and ii) an extensive grid to supply power to each deployed RIS. In this paper, we question the established RIS practices and propose a novel RIS design combining self-configuration and energy self-sufficiency capabilities. We analyze the feasibility of devising fully-autonomous RISs that can be easily and seamlessly installed throughout the environment, following the new Internet-of-Surfaces (IoS) paradigm, requiring modifications neither to the deployed mobile network nor to the power distribution system. In particular, we introduce ARES, an Autonomous RIS with Energy harvesting and Self-configuration solution. ARES achieves outstanding communication performance while demonstrating the feasibility of energy harvesting (EH) for RISs power supply in future deployments.
Leveraging RIS-Enabled Smart Signal Propagation for Solving Infeasible Localization Problems
Apr 25, 2022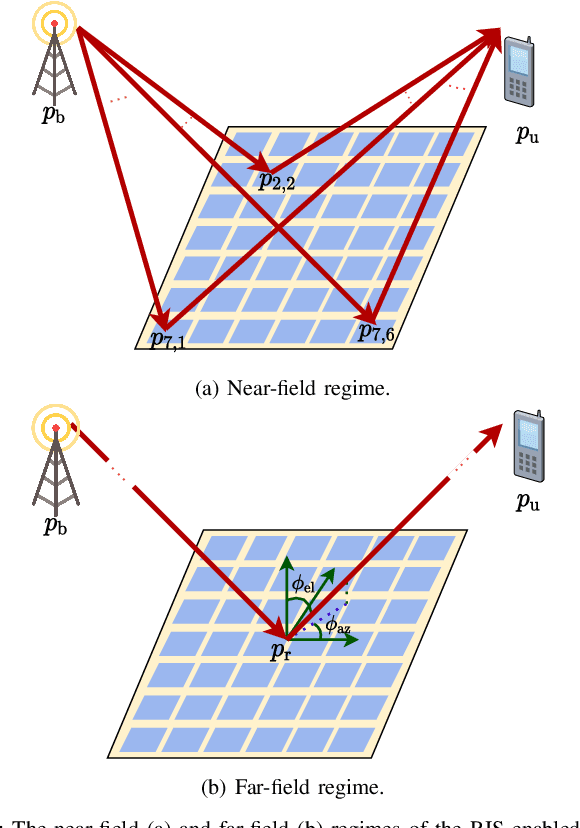
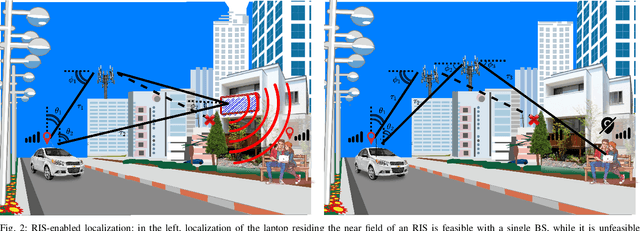
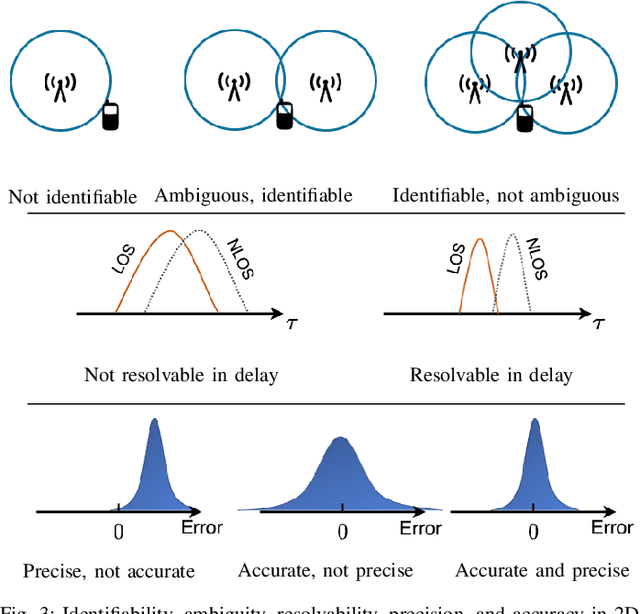
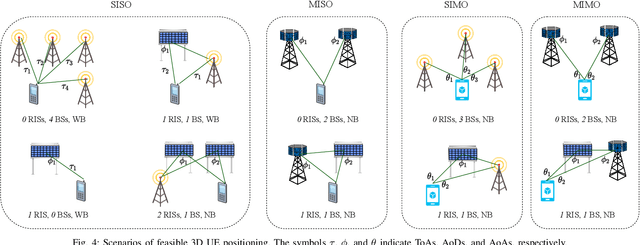
Reconfigurable intelligent surfaces (RISs) have tremendous potential for both communication and localization. While communication benefits are now well-understood, the breakthrough nature of the technology may well lie in its capability to provide location estimates when conventional approaches fail, (e.g., due to insufficient available infrastructure). A limited number of example scenarios have been identified, but an overview of possible RIS-enabled localization scenarios is still missing from the literature. In this article, we present such an overview and extend localization to include even user orientation or velocity. In particular, we consider localization scenarios with various numbers of RISs, single- or multi-antenna base stations, narrowband or wideband transmissions, and near- and farfield operation. Furthermore, we provide a short description of the general RIS operation together with radio localization fundamentals, experimental validation of a localization scheme with two RISs, as well as key research directions and open challenges specific to RIS-enabled localization and sensing.
LOKO: Localization-aware Roll-out Planning for Future Mobile Networks
Jan 11, 2022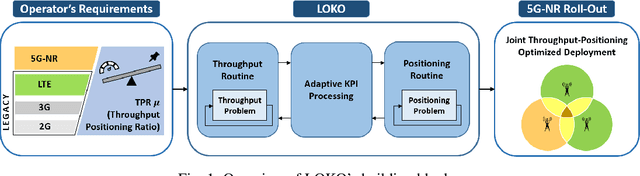
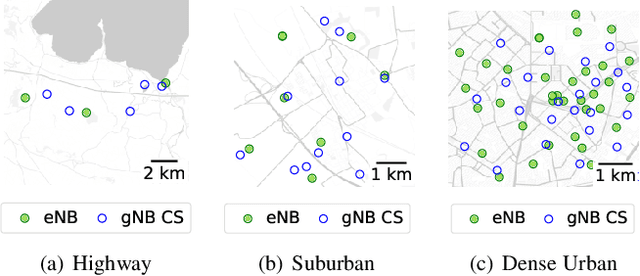
The roll-out phase of the next generation of mobile networks (5G) has started and operators are required to devise deployment solutions while pursuing localization accuracy maximization. Enabling location-based services is expected to be a unique selling point for service providers now able to deliver critical mobile services, e.g., autonomous driving, public safety, remote operations. In this paper, we propose a novel roll-out base station placement solution that, given a Throughput-Positioning Ratio (TPR) target, selects the location of new-generation base stations (among available candidate sites) such that the throughput and localization accuracy are jointly maximized. Moving away from the canonical position error bound (PEB) analysis, we develop a realistic framework in which each positioning measurement is affected by errors depending upon the actual wireless channel between the measuring base station and the target device. Our solution, referred to as LOKO, is a fast-converging algorithm that can be readily applied to current 5G (or future) roll-out processes. LOKO is validated by means of an exhaustive simulation campaign considering real existing deployments of a major European network operator as well as synthetic scenarios.
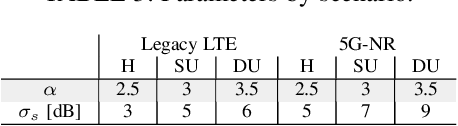
OTFS-superimposed PRACH-aided Localization for UAV Safety Applications
Sep 17, 2021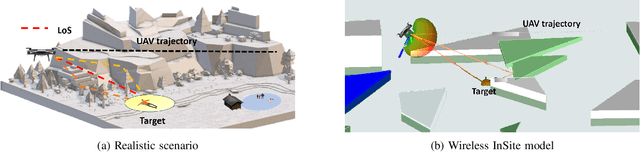
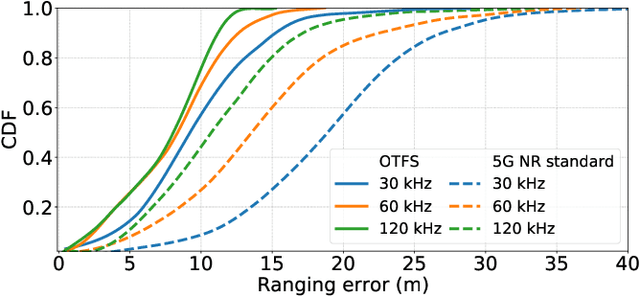
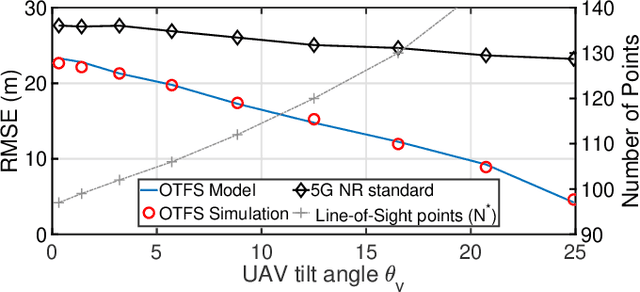
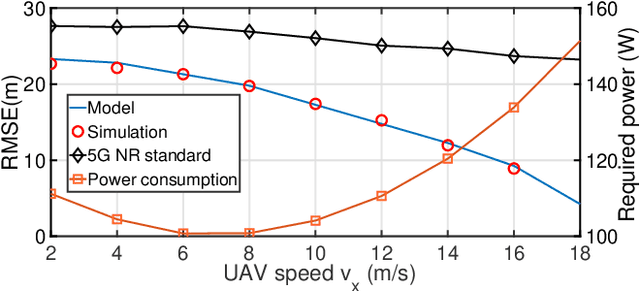
The adoption of Unmanned Aerial Vehicles (UAVs) for public safety applications has skyrocketed in the last years. Leveraging on Physical Random Access Channel (PRACH) preambles, in this paper we pioneer a novel localization technique for UAVs equipped with cellular base stations used in emergency scenarios. We exploit the new concept of Orthogonal Time Frequency Space (OTFS) modulation (tolerant to channel Doppler spread caused by UAVs motion) to build a fully standards-compliant OTFS-modulated PRACH transmission and reception scheme able to perform time-of-arrival (ToA) measurements. First, we analyze such novel ToA ranging technique, both analytically and numerically, to accurately and iteratively derive the distance between localized users and the points traversed by the UAV along its trajectory. Then, we determine the optimal UAV speed as a trade-off between the accuracy of the ranging technique and the power needed by the UAV to reach and keep its speed during emergency operations. Finally, we demonstrate that our solution outperforms standard PRACH-based localization techniques in terms of Root Mean Square Error (RMSE) by about 20% in quasi-static conditions and up to 80% in high-mobility conditions.