 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging RIS-Enabled Smart Signal Propagation for Solving Infeasible Localization Problems
Paper and Code
Apr 25, 2022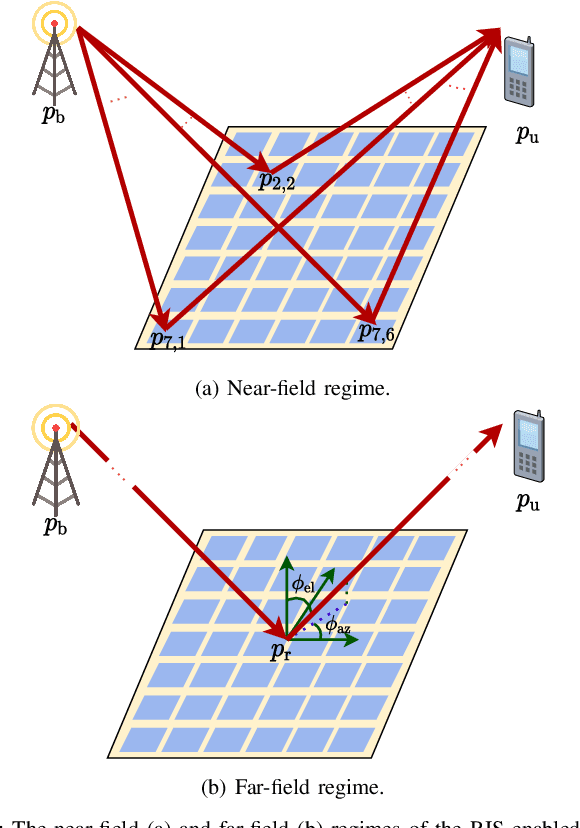
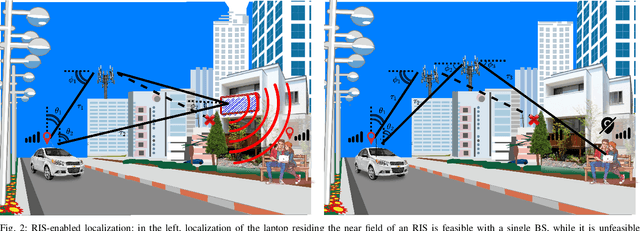
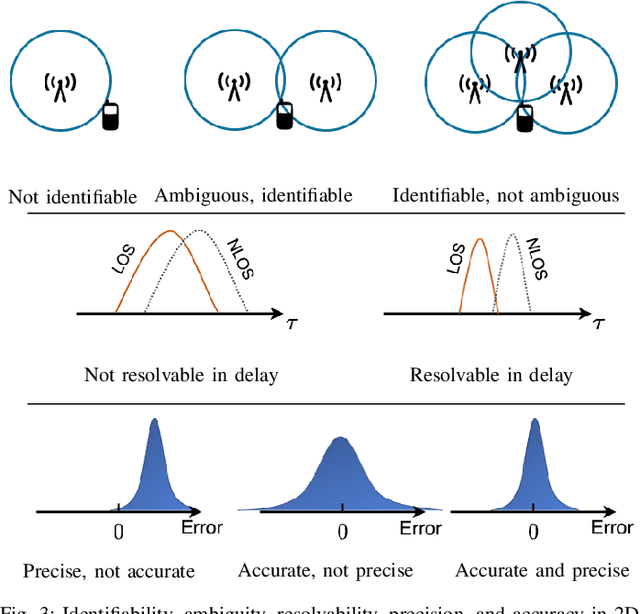
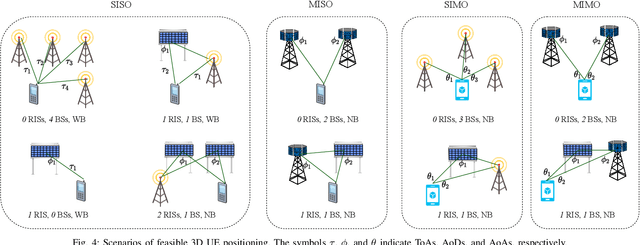
Reconfigurable intelligent surfaces (RISs) have tremendous potential for both communication and localization. While communication benefits are now well-understood, the breakthrough nature of the technology may well lie in its capability to provide location estimates when conventional approaches fail, (e.g., due to insufficient available infrastructure). A limited number of example scenarios have been identified, but an overview of possible RIS-enabled localization scenarios is still missing from the literature. In this article, we present such an overview and extend localization to include even user orientation or velocity. In particular, we consider localization scenarios with various numbers of RISs, single- or multi-antenna base stations, narrowband or wideband transmissions, and near- and farfield operation. Furthermore, we provide a short description of the general RIS operation together with radio localization fundamentals, experimental validation of a localization scheme with two RISs, as well as key research directions and open challenges specific to RIS-enabled localization and sensing.