 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Emotion Recognition with 3D Pointclouds Obtained from Facial Expression Images
Mar 29, 2026Facial Emotion Recognition is a critical research area within Affective Computing due to its wide-ranging applications in Human Computer Interaction, mental health assessment and fatigue monitoring. Current FER methods predominantly rely on Deep Learning techniques trained on 2D image data, which pose significant privacy concerns and are unsuitable for continuous, real-time monitoring. As an alternative, we propose High-Frequency Wireless Sensing (HFWS) as an enabler of continuous, privacy-aware FER, through the generation of detailed 3D facial pointclouds via on-person sensors embedded in wearables. We present arguments supporting the privacy advantages of HFWS over traditional 2D imaging, particularly under increasingly stringent data protection regulations. A major barrier to adopting HFWS for FER is the scarcity of labeled 3D FER datasets. Towards addressing this issue, we introduce a FLAME-based method to generate 3D facial pointclouds from existing public 2D datasets. Using this approach, we create AffectNet3D, a 3D version of the AffectNet database. To evaluate the quality and usability of the generated data, we design a pointcloud refinement pipeline focused on isolating the facial region, and train the popular PointNet++ model on the refined pointclouds. Fine-tuning the model on a small subset of the unseen 3D FER dataset BU-3DFE yields a classification accuracy exceeding 70%, comparable to oracle-level performance. To further investigate the potential of HFWS-based FER for continuous monitoring, we simulate wearable sensing conditions by masking portions of the generated pointclouds. Experimental results show that models trained on AffectNet3D and fine-tuned with just 25% of BU-3DFE outperform those trained solely on BU-3DFE. These findings highlight the viability of our pipeline and support the feasibility of continuous, privacy-aware FER via wearable HFWS systems.
Enhancing Cellular-enabled Collaborative Robots Planning through GNSS data for SAR Scenarios
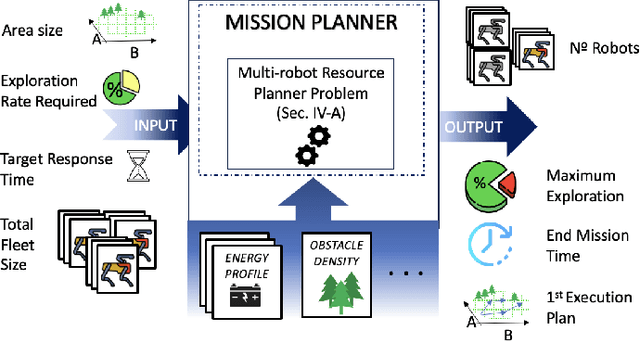
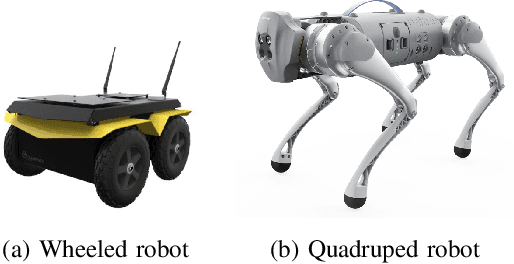
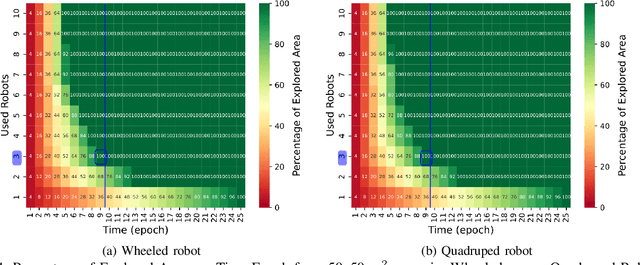
Feb 25, 2026Cellular-enabled collaborative robots are becoming paramount in Search-and-Rescue (SAR) and emergency response. Crucially dependent on resilient mobile network connectivity, they serve as invaluable assets for tasks like rapid victim localization and the exploration of hazardous, otherwise unreachable areas. However, their reliance on battery power and the need for persistent, low-latency communication limit operational time and mobility. To address this, and considering the evolving capabilities of 5G/6G networks, we propose a novel SAR framework that includes Mission Planning and Mission Execution phases and that optimizes robot deployment. By considering parameters such as the exploration area size, terrain elevation, robot fleet size, communication-influenced energy profiles, desired exploration rate, and target response time, our framework determines the minimum number of robots required and their optimal paths to ensure effective coverage and timely data backhaul over mobile networks. Our results demonstrate the trade-offs between number of robots, explored area, and response time for wheeled and quadruped robots. Further, we quantify the impact of terrain elevation data on mission time and energy consumption, showing the benefits of incorporating real-world environmental factors that might also affect mobile signal propagation and connectivity into SAR planning. This framework provides critical insights for leveraging next-generation mobile networks to enhance autonomous SAR operations.
Neural 3D Object Reconstruction with Small-Scale Unmanned Aerial Vehicles
Sep 15, 2025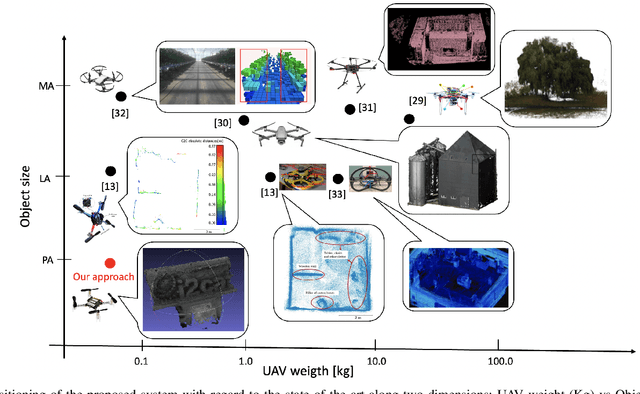
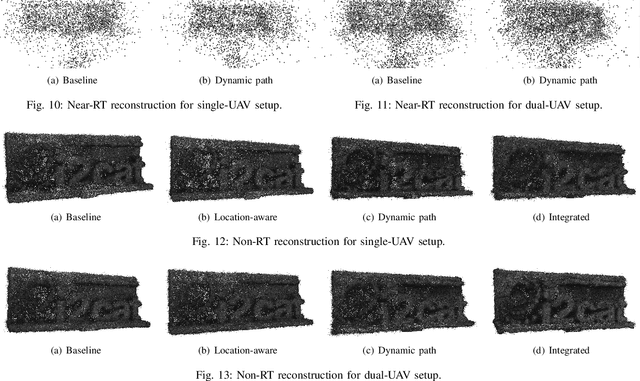
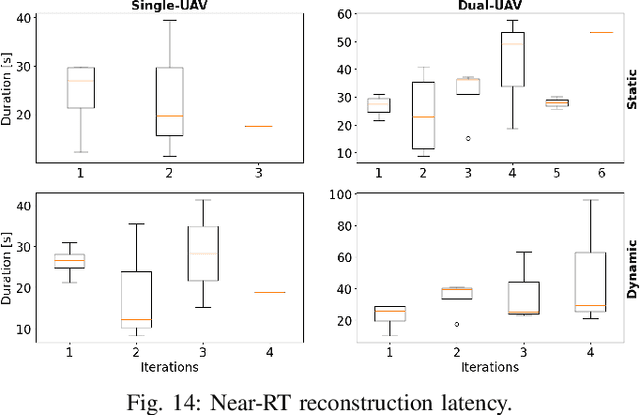
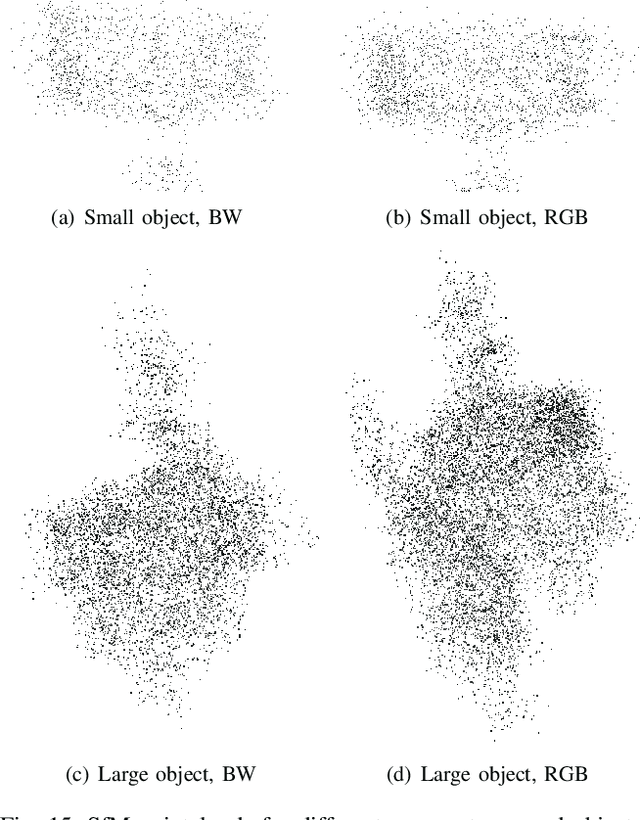
Small Unmanned Aerial Vehicles (UAVs) exhibit immense potential for navigating indoor and hard-to-reach areas, yet their significant constraints in payload and autonomy have largely prevented their use for complex tasks like high-quality 3-Dimensional (3D) reconstruction. To overcome this challenge, we introduce a novel system architecture that enables fully autonomous, high-fidelity 3D scanning of static objects using UAVs weighing under 100 grams. Our core innovation lies in a dual-reconstruction pipeline that creates a real-time feedback loop between data capture and flight control. A near-real-time (near-RT) process uses Structure from Motion (SfM) to generate an instantaneous pointcloud of the object. The system analyzes the model quality on the fly and dynamically adapts the UAV's trajectory to intelligently capture new images of poorly covered areas. This ensures comprehensive data acquisition. For the final, detailed output, a non-real-time (non-RT) pipeline employs a Neural Radiance Fields (NeRF)-based Neural 3D Reconstruction (N3DR) approach, fusing SfM-derived camera poses with precise Ultra Wide-Band (UWB) location data to achieve superior accuracy. We implemented and validated this architecture using Crazyflie 2.1 UAVs. Our experiments, conducted in both single- and multi-UAV configurations, conclusively show that dynamic trajectory adaptation consistently improves reconstruction quality over static flight paths. This work demonstrates a scalable and autonomous solution that unlocks the potential of miniaturized UAVs for fine-grained 3D reconstruction in constrained environments, a capability previously limited to much larger platforms.
Experimental Assessment of Neural 3D Reconstruction for Small UAV-based Applications
Jun 24, 2025



The increasing miniaturization of Unmanned Aerial Vehicles (UAVs) has expanded their deployment potential to indoor and hard-to-reach areas. However, this trend introduces distinct challenges, particularly in terms of flight dynamics and power consumption, which limit the UAVs' autonomy and mission capabilities. This paper presents a novel approach to overcoming these limitations by integrating Neural 3D Reconstruction (N3DR) with small UAV systems for fine-grained 3-Dimensional (3D) digital reconstruction of small static objects. Specifically, we design, implement, and evaluate an N3DR-based pipeline that leverages advanced models, i.e., Instant-ngp, Nerfacto, and Splatfacto, to improve the quality of 3D reconstructions using images of the object captured by a fleet of small UAVs. We assess the performance of the considered models using various imagery and pointcloud metrics, comparing them against the baseline Structure from Motion (SfM) algorithm. The experimental results demonstrate that the N3DR-enhanced pipeline significantly improves reconstruction quality, making it feasible for small UAVs to support high-precision 3D mapping and anomaly detection in constrained environments. In more general terms, our results highlight the potential of N3DR in advancing the capabilities of miniaturized UAV systems.
Experimental Assessment of A Framework for In-body RF-backscattering Localization
Jun 24, 2025Localization of in-body devices is beneficial for Gastrointestinal (GI) diagnosis and targeted treatment. Traditional methods such as imaging and endoscopy are invasive and limited in resolution, highlighting the need for innovative alternatives. This study presents an experimental framework for Radio Frequency (RF)-backscatter-based in-body localization, inspired by the ReMix approach, and evaluates its performance in real-world conditions. The experimental setup includes an in-body backscatter device and various off-body antenna configurations to investigate harmonic generation and reception in air, chicken and pork tissues. The results indicate that optimal backscatter device positioning, antenna selection, and gain settings significantly impact performance, with denser biological tissues leading to greater attenuation. The study also highlights challenges such as external interference and plastic enclosures affecting propagation. The findings emphasize the importance of interference mitigation and refined propagation models to enhance performance.
REACT: Multi Robot Energy-Aware Orchestrator for Indoor Search and Rescue Critical Tasks
Mar 07, 2025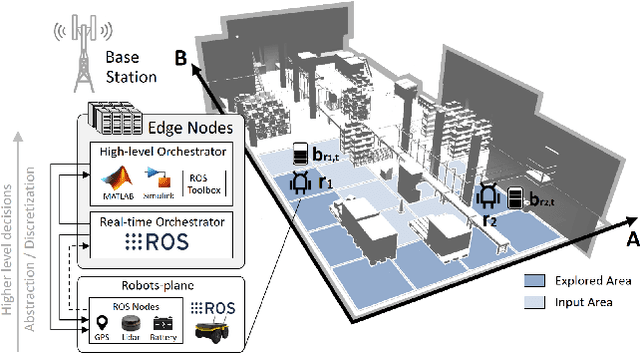
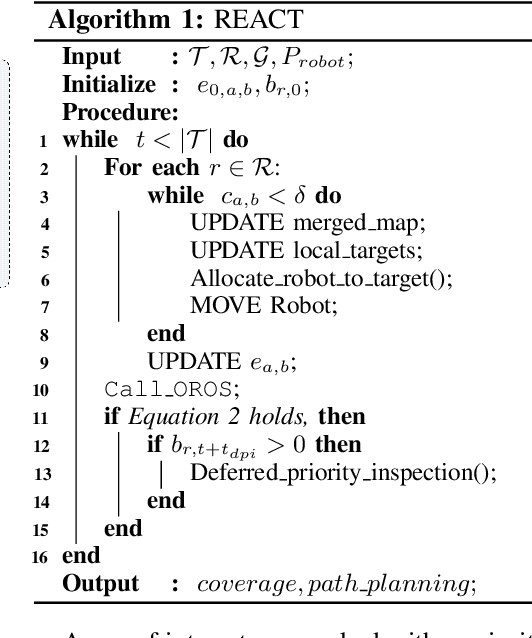
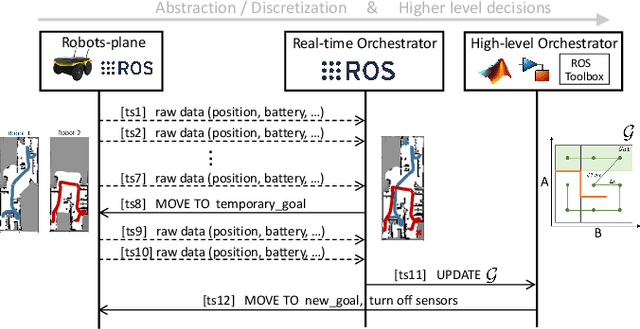
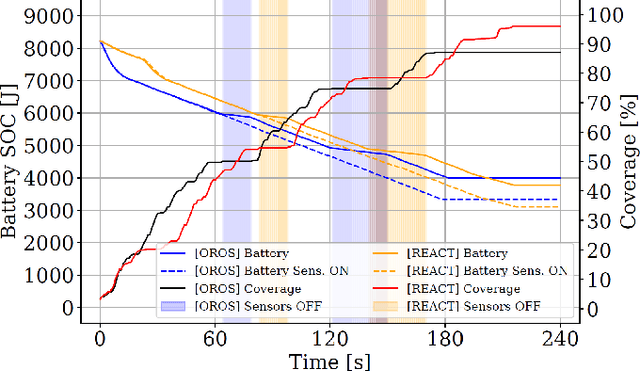
Smart factories enhance production efficiency and sustainability, but emergencies like human errors, machinery failures and natural disasters pose significant risks. In critical situations, such as fires or earthquakes, collaborative robots can assist first-responders by entering damaged buildings and locating missing persons, mitigating potential losses. Unlike previous solutions that overlook the critical aspect of energy management, in this paper we propose REACT, a smart energy-aware orchestrator that optimizes the exploration phase, ensuring prolonged operational time and effective area coverage. Our solution leverages a fleet of collaborative robots equipped with advanced sensors and communication capabilities to explore and navigate unknown indoor environments, such as smart factories affected by fires or earthquakes, with high density of obstacles. By leveraging real-time data exchange and cooperative algorithms, the robots dynamically adjust their paths, minimize redundant movements and reduce energy consumption. Extensive simulations confirm that our approach significantly improves the efficiency and reliability of search and rescue missions in complex indoor environments, improving the exploration rate by 10% over existing methods and reaching a map coverage of 97% under time critical operations, up to nearly 100% under relaxed time constraint.
Cellular-enabled Collaborative Robots Planning and Operations for Search-and-Rescue Scenarios
Mar 14, 2024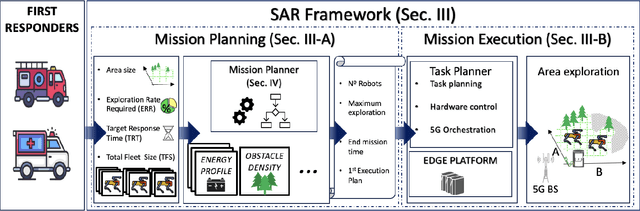
Mission-critical operations, particularly in the context of Search-and-Rescue (SAR) and emergency response situations, demand optimal performance and efficiency from every component involved to maximize the success probability of such operations. In these settings, cellular-enabled collaborative robotic systems have emerged as invaluable assets, assisting first responders in several tasks, ranging from victim localization to hazardous area exploration. However, a critical limitation in the deployment of cellular-enabled collaborative robots in SAR missions is their energy budget, primarily supplied by batteries, which directly impacts their task execution and mobility. This paper tackles this problem, and proposes a search-and-rescue framework for cellular-enabled collaborative robots use cases that, taking as input the area size to be explored, the robots fleet size, their energy profile, exploration rate required and target response time, finds the minimum number of robots able to meet the SAR mission goals and the path they should follow to explore the area. Our results, i) show that first responders can rely on a SAR cellular-enabled robotics framework when planning mission-critical operations to take informed decisions with limited resources, and, ii) illustrate the number of robots versus explored area and response time trade-off depending on the type of robot: wheeled vs quadruped.
Unlocking Metasurface Practicality for B5G Networks: AI-assisted RIS Planning
Oct 16, 2023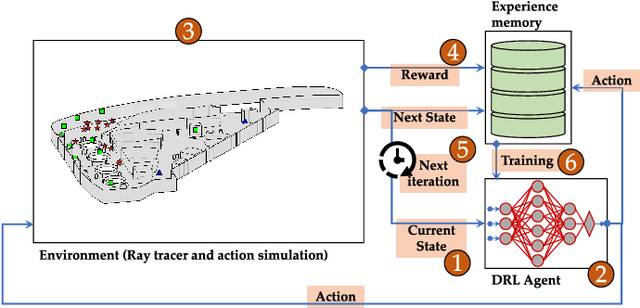
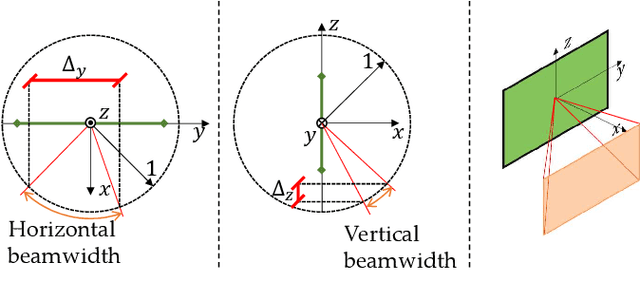
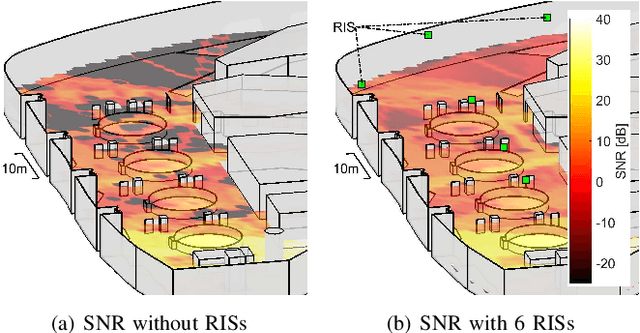
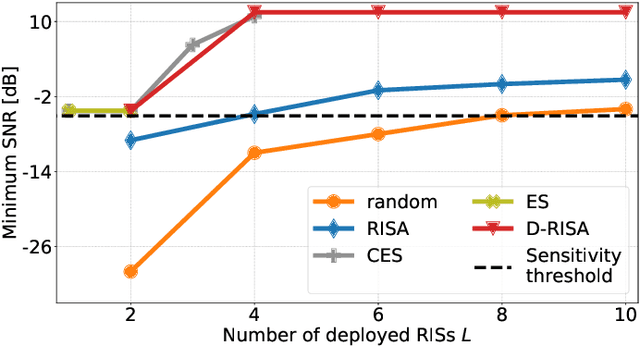
The advent of reconfigurable intelligent surfaces(RISs) brings along significant improvements for wireless technology on the verge of beyond-fifth-generation networks (B5G).The proven flexibility in influencing the propagation environment opens up the possibility of programmatically altering the wireless channel to the advantage of network designers, enabling the exploitation of higher-frequency bands for superior throughput overcoming the challenging electromagnetic (EM) propagation properties at these frequency bands. However, RISs are not magic bullets. Their employment comes with significant complexity, requiring ad-hoc deployments and management operations to come to fruition. In this paper, we tackle the open problem of bringing RISs to the field, focusing on areas with little or no coverage. In fact, we present a first-of-its-kind deep reinforcement learning (DRL) solution, dubbed as D-RISA, which trains a DRL agent and, in turn, obtain san optimal RIS deployment. We validate our framework in the indoor scenario of the Rennes railway station in France, assessing the performance of our algorithm against state-of-the-art (SOA) approaches. Our benchmarks showcase better coverage, i.e., 10-dB increase in minimum signal-to-noise ratio (SNR), at lower computational time (up to -25 percent) while improving scalability towards denser network deployments.
An Orchestration Framework for Open System Models of Reconfigurable Intelligent Surfaces
Apr 21, 2023



To obviate the control of reflective intelligent surfaces (RISs) and the related control overhead, recent works envisioned autonomous and self-configuring RISs that do not need explicit use of control channels. Instead, these devices, named hybrid RISs (HRISs), are equipped with receiving radio-frequency (RF) chains and can perform sensing operations to act independently and in parallel to the other network entities. A natural problem then emerges: as the HRIS operates concurrently with the communication protocols, how should its operation modes be scheduled in time such that it helps the network while minimizing any undesirable effects? In this paper, we propose an orchestration framework that answers this question revealing an engineering trade-off, called the self-configuring trade-off, that characterizes the applicability of self-configuring HRISs under the consideration of massive multiple-input multiple-output (mMIMO) networks. We evaluate our proposed framework considering two different HRIS hardware architectures, the power- and signal-based HRISs that differ in their hardware complexity. The numerical results show that the self-configuring HRIS can offer significant performance gains when adopting our framework.
ARES: Autonomous RIS solution with Energy harvesting and Self-configuration towards 6G
Mar 02, 2023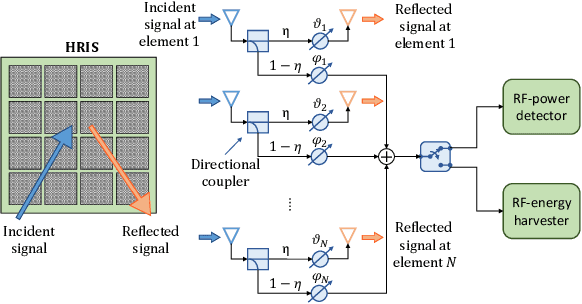



Reconfigurable Intelligent Surfaces (RISs) are expected to play a crucial role in reaching the key performance indicators (KPIs) for future 6G networks. Their competitive edge over conventional technologies lies in their ability to control the wireless environment propagation properties at will, thus revolutionizing the traditional communication paradigm that perceives the communication channel as an uncontrollable black box. As RISs transition from research to market, practical deployment issues arise. Major roadblocks for commercially viable RISs are i) the need for a fast and complex control channel to adapt to the ever-changing wireless channel conditions, and ii) an extensive grid to supply power to each deployed RIS. In this paper, we question the established RIS practices and propose a novel RIS design combining self-configuration and energy self-sufficiency capabilities. We analyze the feasibility of devising fully-autonomous RISs that can be easily and seamlessly installed throughout the environment, following the new Internet-of-Surfaces (IoS) paradigm, requiring modifications neither to the deployed mobile network nor to the power distribution system. In particular, we introduce ARES, an Autonomous RIS with Energy harvesting and Self-configuration solution. ARES achieves outstanding communication performance while demonstrating the feasibility of energy harvesting (EH) for RISs power supply in future deployments.