 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCellular-enabled Collaborative Robots Planning and Operations for Search-and-Rescue Scenarios
Mar 14, 2024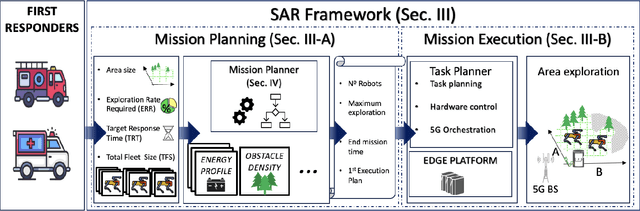
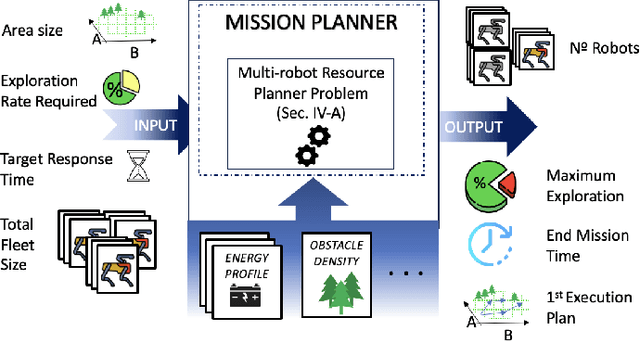
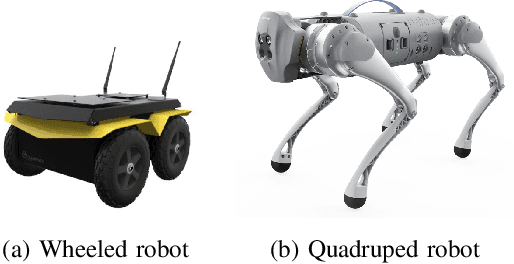
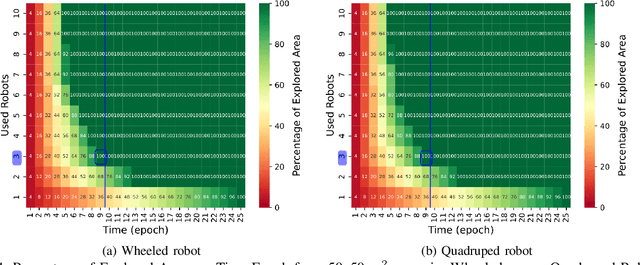
Mission-critical operations, particularly in the context of Search-and-Rescue (SAR) and emergency response situations, demand optimal performance and efficiency from every component involved to maximize the success probability of such operations. In these settings, cellular-enabled collaborative robotic systems have emerged as invaluable assets, assisting first responders in several tasks, ranging from victim localization to hazardous area exploration. However, a critical limitation in the deployment of cellular-enabled collaborative robots in SAR missions is their energy budget, primarily supplied by batteries, which directly impacts their task execution and mobility. This paper tackles this problem, and proposes a search-and-rescue framework for cellular-enabled collaborative robots use cases that, taking as input the area size to be explored, the robots fleet size, their energy profile, exploration rate required and target response time, finds the minimum number of robots able to meet the SAR mission goals and the path they should follow to explore the area. Our results, i) show that first responders can rely on a SAR cellular-enabled robotics framework when planning mission-critical operations to take informed decisions with limited resources, and, ii) illustrate the number of robots versus explored area and response time trade-off depending on the type of robot: wheeled vs quadruped.