 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapViT: A Two-Stage ViT-Based Framework for Real-Time Radio Quality Map Prediction in Dynamic Environments
Jan 22, 2026Recent advancements in mobile and wireless networks are unlocking the full potential of robotic autonomy, enabling robots to take advantage of ultra-low latency, high data throughput, and ubiquitous connectivity. However, for robots to navigate and operate seamlessly, efficiently and reliably, they must have an accurate understanding of both their surrounding environment and the quality of radio signals. Achieving this in highly dynamic and ever-changing environments remains a challenging and largely unsolved problem. In this paper, we introduce MapViT, a two-stage Vision Transformer (ViT)-based framework inspired by the success of pre-train and fine-tune paradigm for Large Language Models (LLMs). MapViT is designed to predict both environmental changes and expected radio signal quality. We evaluate the framework using a set of representative Machine Learning (ML) models, analyzing their respective strengths and limitations across different scenarios. Experimental results demonstrate that the proposed two-stage pipeline enables real-time prediction, with the ViT-based implementation achieving a strong balance between accuracy and computational efficiency. This makes MapViT a promising solution for energy- and resource-constrained platforms such as mobile robots. Moreover, the geometry foundation model derived from the self-supervised pre-training stage improves data efficiency and transferability, enabling effective downstream predictions even with limited labeled data. Overall, this work lays the foundation for next-generation digital twin ecosystems, and it paves the way for a new class of ML foundation models driving multi-modal intelligence in future 6G-enabled systems.
Meta-reasoning Using Attention Maps and Its Applications in Cloud Robotics
May 06, 2025Metareasoning, a branch of AI, focuses on reasoning about reasons. It has the potential to enhance robots' decision-making processes in unexpected situations. However, the concept has largely been confined to theoretical discussions and case-by-case investigations, lacking general and practical solutions when the Value of Computation (VoC) is undefined, which is common in unexpected situations. In this work, we propose a revised meta-reasoning framework that significantly improves the scalability of the original approach in unexpected situations. This is achieved by incorporating semantic attention maps and unsupervised 'attention' updates into the metareasoning processes. To accommodate environmental dynamics, 'lines of thought' are used to bridge context-specific objects with abstracted attentions, while meta-information is monitored and controlled at the meta-level for effective reasoning. The practicality of the proposed approach is demonstrated through cloud robots deployed in real-world scenarios, showing improved performance and robustness.
Energy-aware Joint Orchestration of 5G and Robots: Experimental Testbed and Field Validation
Mar 25, 2025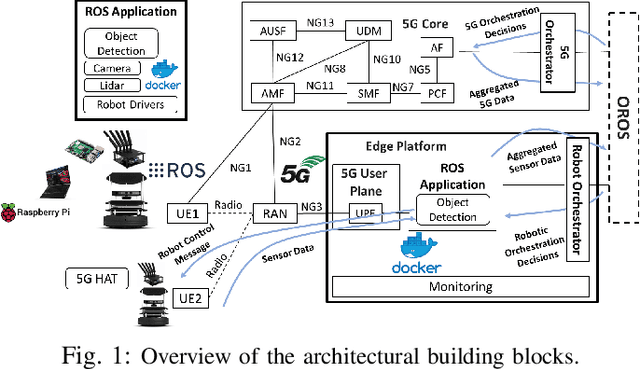
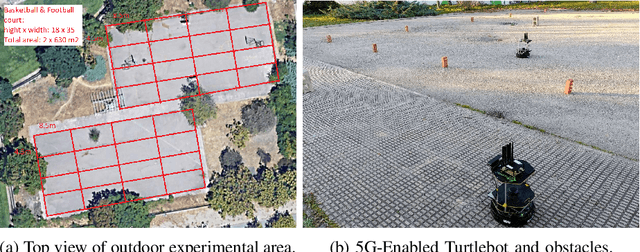
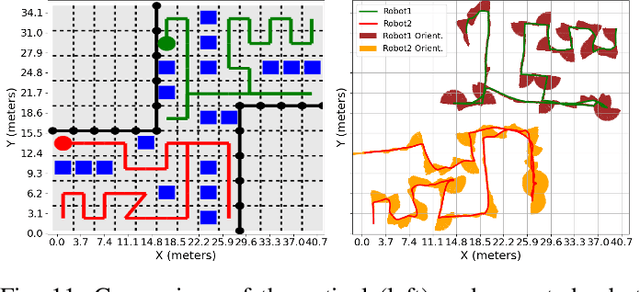
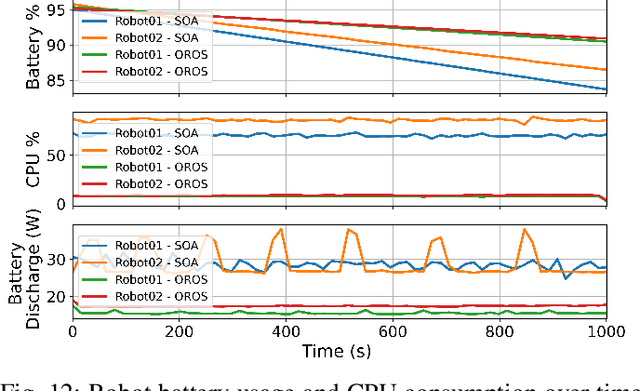
5G mobile networks introduce a new dimension for connecting and operating mobile robots in outdoor environments, leveraging cloud-native and offloading features of 5G networks to enable fully flexible and collaborative cloud robot operations. However, the limited battery life of robots remains a significant obstacle to their effective adoption in real-world exploration scenarios. This paper explores, via field experiments, the potential energy-saving gains of OROS, a joint orchestration of 5G and Robot Operating System (ROS) that coordinates multiple 5G-connected robots both in terms of navigation and sensing, as well as optimizes their cloud-native service resource utilization while minimizing total resource and energy consumption on the robots based on real-time feedback. We designed, implemented and evaluated our proposed OROS in an experimental testbed composed of commercial off-the-shelf robots and a local 5G infrastructure deployed on a campus. The experimental results demonstrated that OROS significantly outperforms state-of-the-art approaches in terms of energy savings by offloading demanding computational tasks to the 5G edge infrastructure and dynamic energy management of on-board sensors (e.g., switching them off when they are not needed). This strategy achieves approximately 15% energy savings on the robots, thereby extending battery life, which in turn allows for longer operating times and better resource utilization.
* 14 pages, 15 figures, journal
Cellular-enabled Collaborative Robots Planning and Operations for Search-and-Rescue Scenarios
Mar 14, 2024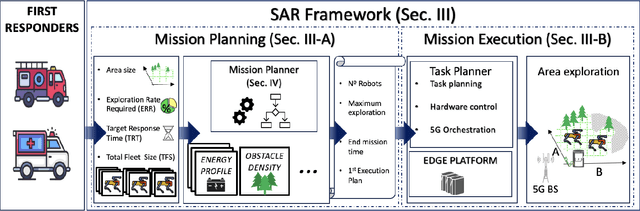
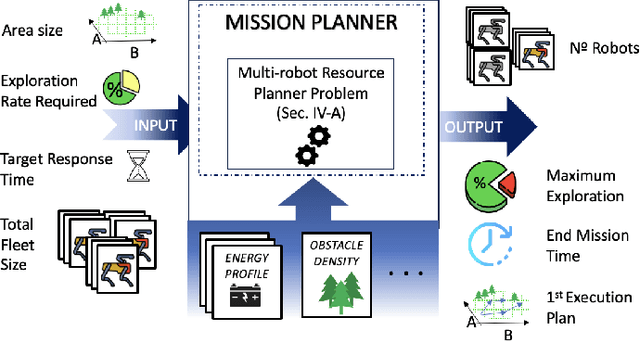
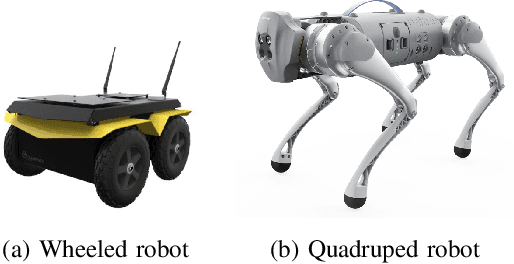
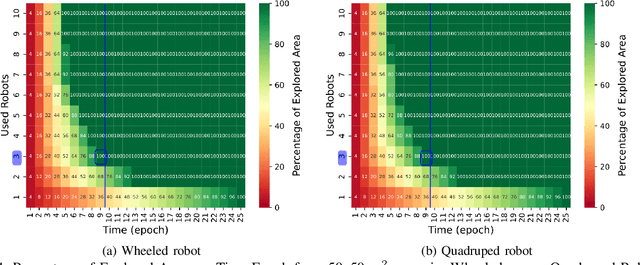
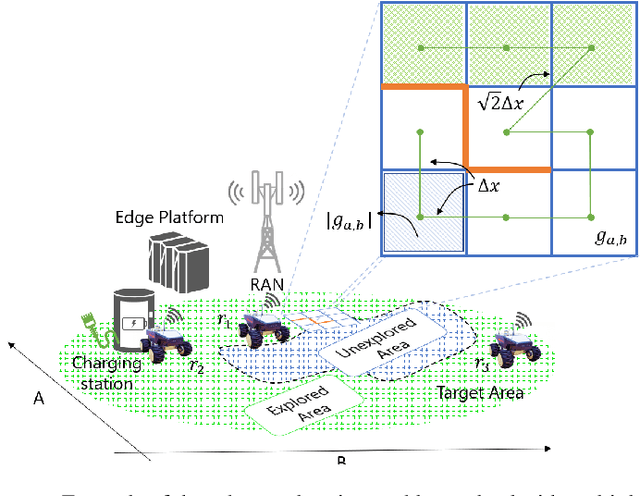
Mission-critical operations, particularly in the context of Search-and-Rescue (SAR) and emergency response situations, demand optimal performance and efficiency from every component involved to maximize the success probability of such operations. In these settings, cellular-enabled collaborative robotic systems have emerged as invaluable assets, assisting first responders in several tasks, ranging from victim localization to hazardous area exploration. However, a critical limitation in the deployment of cellular-enabled collaborative robots in SAR missions is their energy budget, primarily supplied by batteries, which directly impacts their task execution and mobility. This paper tackles this problem, and proposes a search-and-rescue framework for cellular-enabled collaborative robots use cases that, taking as input the area size to be explored, the robots fleet size, their energy profile, exploration rate required and target response time, finds the minimum number of robots able to meet the SAR mission goals and the path they should follow to explore the area. Our results, i) show that first responders can rely on a SAR cellular-enabled robotics framework when planning mission-critical operations to take informed decisions with limited resources, and, ii) illustrate the number of robots versus explored area and response time trade-off depending on the type of robot: wheeled vs quadruped.
Goal-Oriented and Semantic Communication in 6G AI-Native Networks: The 6G-GOALS Approach
Feb 12, 2024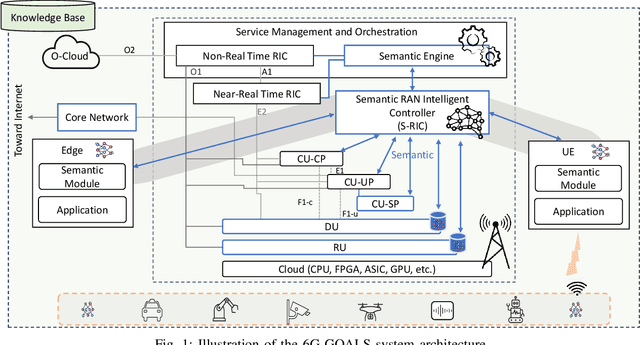
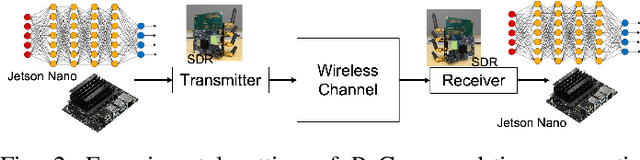
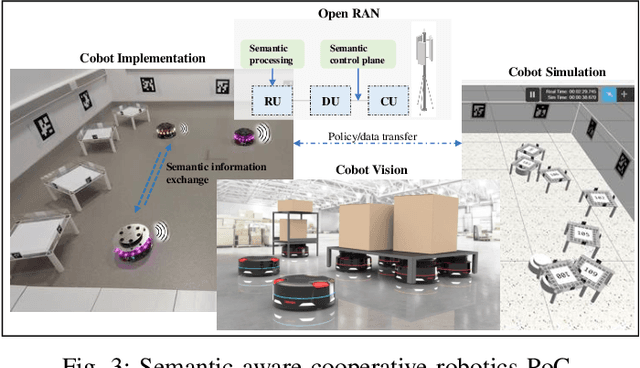
Recent advances in AI technologies have notably expanded device intelligence, fostering federation and cooperation among distributed AI agents. These advancements impose new requirements on future 6G mobile network architectures. To meet these demands, it is essential to transcend classical boundaries and integrate communication, computation, control, and intelligence. This paper presents the 6G-GOALS approach to goal-oriented and semantic communications for AI-Native 6G Networks. The proposed approach incorporates semantic, pragmatic, and goal-oriented communication into AI-native technologies, aiming to facilitate information exchange between intelligent agents in a more relevant, effective, and timely manner, thereby optimizing bandwidth, latency, energy, and electromagnetic field (EMF) radiation. The focus is on distilling data to its most relevant form and terse representation, aligning with the source's intent or the destination's objectives and context, or serving a specific goal. 6G-GOALS builds on three fundamental pillars: i) AI-enhanced semantic data representation, sensing, compression, and communication, ii) foundational AI reasoning and causal semantic data representation, contextual relevance, and value for goal-oriented effectiveness, and iii) sustainability enabled by more efficient wireless services. Finally, we illustrate two proof-of-concepts implementing semantic, goal-oriented, and pragmatic communication principles in near-future use cases. Our study covers the project's vision, methodologies, and potential impact.
OROS: Orchestrating ROS-driven Collaborative Connected Robots in Mission-Critical Operations
May 06, 2022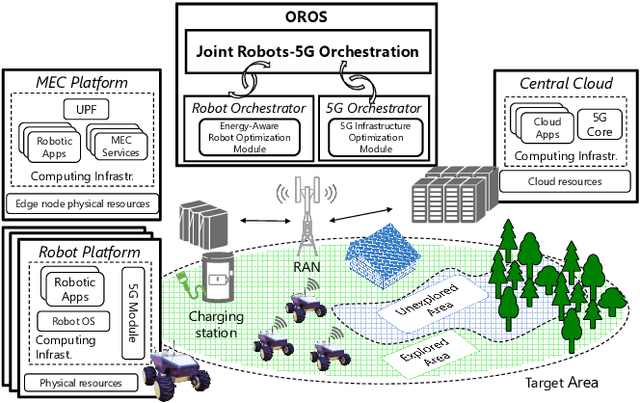


Battery life for collaborative robotics scenarios is a key challenge limiting operational uses and deployment in real life. Mission-Critical tasks are among the most relevant and challenging scenarios. As multiple and heterogeneous on-board sensors are required to explore unknown environments in simultaneous localization and mapping (SLAM) tasks, battery life problems are further exacerbated. Given the time-sensitivity of mission-critical operations, the successful completion of specific tasks in the minimum amount of time is of paramount importance. In this paper, we analyze the benefits of 5G-enabled collaborative robots by enhancing the Robot Operating System (ROS) capabilities with network orchestration features for energy-saving purposes. We propose OROS, a novel orchestration approach that minimizes mission-critical task completion times of 5G-connected robots by jointly optimizing robotic navigation and sensing together with infrastructure resources. Our results show that OROS significantly outperforms state-of-the-art solutions in exploration tasks completion times by exploiting 5G orchestration features for battery life extension.
$π$-ROAD: a Learn-as-You-Go Framework for On-Demand Emergency Slices in V2X Scenarios
Dec 11, 2020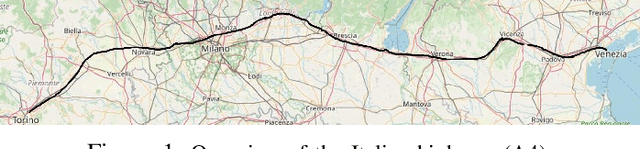
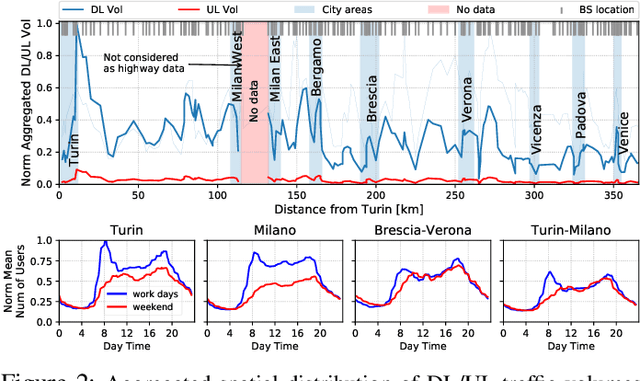
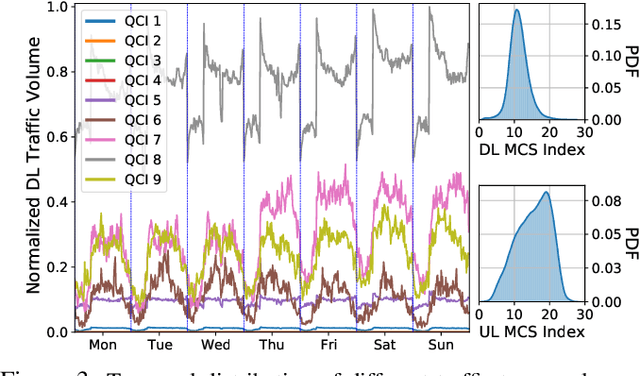
Vehicle-to-everything (V2X) is expected to become one of the main drivers of 5G business in the near future. Dedicated \emph{network slices} are envisioned to satisfy the stringent requirements of advanced V2X services, such as autonomous driving, aimed at drastically reducing road casualties. However, as V2X services become more mission-critical, new solutions need to be devised to guarantee their successful service delivery even in exceptional situations, e.g. road accidents, congestion, etc. In this context, we propose $\pi$-ROAD, a \emph{deep learning} framework to automatically learn regular mobile traffic patterns along roads, detect non-recurring events and classify them by severity level. $\pi$-ROAD enables operators to \emph{proactively} instantiate dedicated \emph{Emergency Network Slices (ENS)} as needed while re-dimensioning the existing slices according to their service criticality level. Our framework is validated by means of real mobile network traces collected within $400~km$ of a highway in Europe and augmented with publicly available information on related road events. Our results show that $\pi$-ROAD successfully detects and classifies non-recurring road events and reduces up to $30\%$ the impact of ENS on already running services.
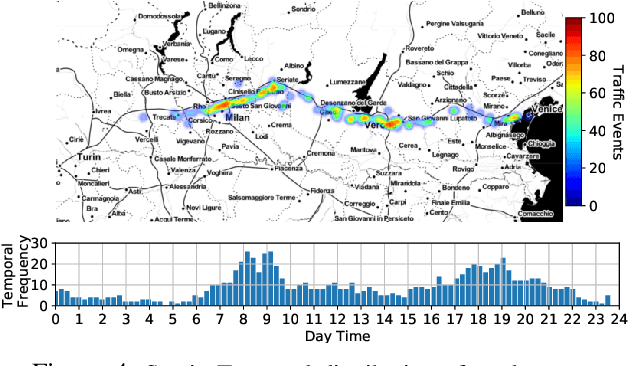
ARENA: A Data-driven Radio Access Networks Analysis of Football Events
Oct 19, 2020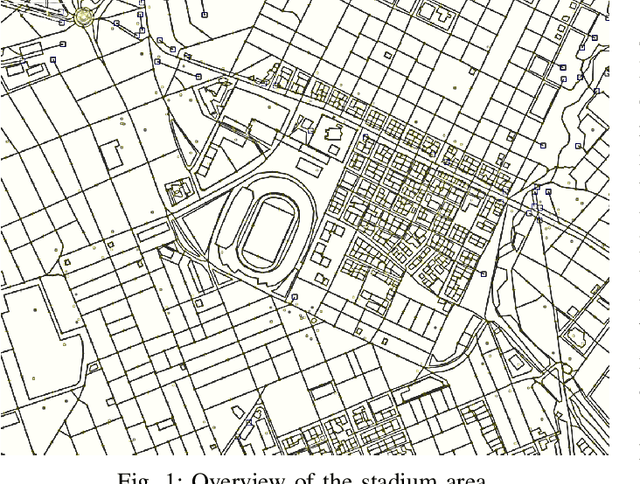
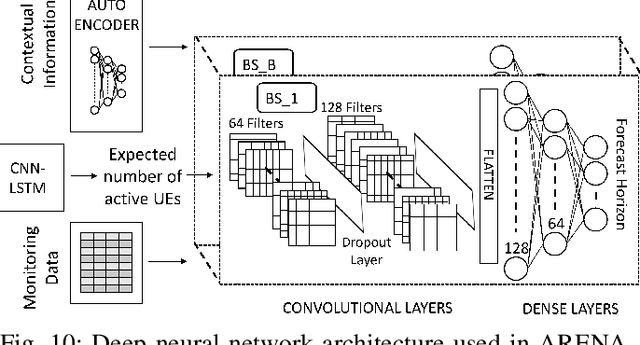
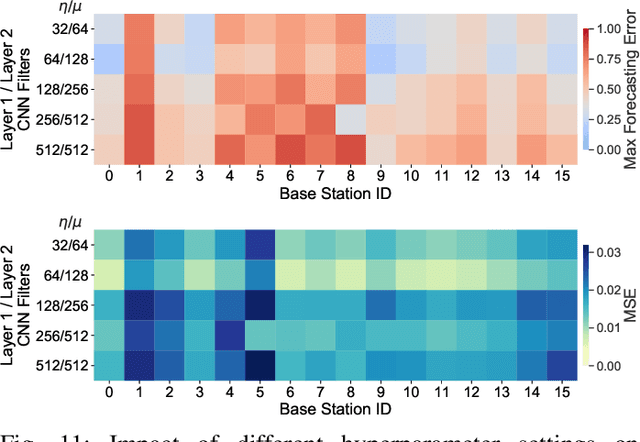
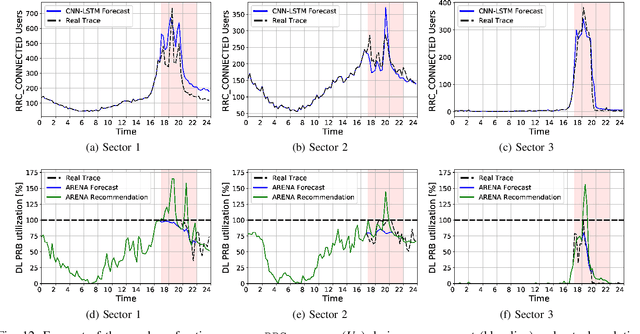
Mass events represent one of the most challenging scenarios for mobile networks because, although their date and time are usually known in advance, the actual demand for resources is difficult to predict due to its dependency on many different factors. Based on data provided by a major European carrier during mass events in a football stadium comprising up to 30.000 people, 16 base station sectors and $1$Km$^2$ area, we performed a data-driven analysis of the radio access network infrastructure dynamics during such events. Given the insights obtained from the analysis, we developed ARENA, a model-free deep learning Radio Access Network (RAN) capacity forecasting solution that, taking as input past network monitoring data and events context information, provides guidance to mobile operators on the expected RAN capacity needed during a future event. Our results, validated against real events contained in the dataset, illustrate the effectiveness of our proposed solution.
LACO: A Latency-Driven Network Slicing Orchestration in Beyond-5G Networks
Sep 07, 2020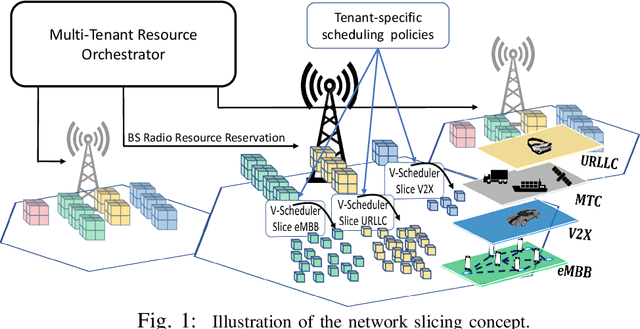
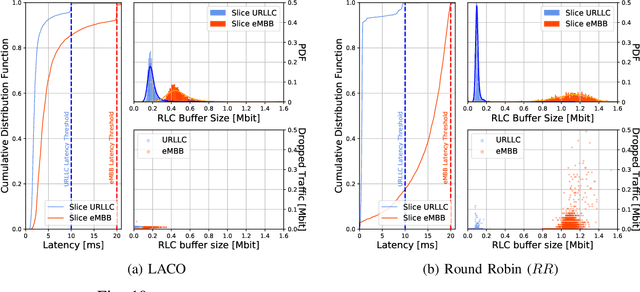
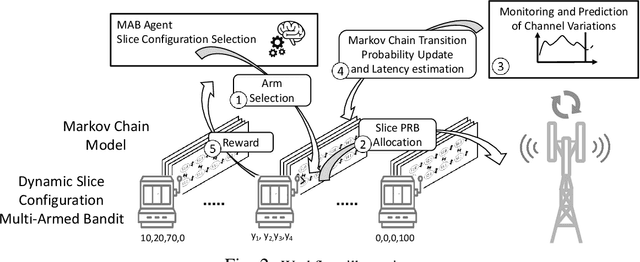
Network Slicing is expected to become a game changer in the upcoming 5G networks and beyond, enlarging the telecom business ecosystem through still-unexplored vertical industry profits. This implies that heterogeneous service level agreements (SLAs) must be guaranteed per slice given the multitude of predefined requirements. In this paper, we pioneer a novel radio slicing orchestration solution that simultaneously provides-latency and throughput guarantees in a multi-tenancy environment. Leveraging on a solid mathematical framework, we exploit the exploration-vs-exploitation paradigm by means of a multi-armed-bandit-based(MAB) orchestrator, LACO, that makes adaptive resource slicing decisions with no prior knowledge on the traffic demand or channel quality statistics. As opposed to traditional MAB methods that are blind to the underlying system, LACO relies on system structure information to expedite decisions. After a preliminary simulations campaign empirically proving the validness of our solution, we provide a robust implementation of LACO using off-the-shelf equipment to fully emulate realistic network conditions:near-optimal results within affordable computational time are measured when LACO is in place.