 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Cellular-enabled Collaborative Robots Planning through GNSS data for SAR Scenarios
Feb 25, 2026Cellular-enabled collaborative robots are becoming paramount in Search-and-Rescue (SAR) and emergency response. Crucially dependent on resilient mobile network connectivity, they serve as invaluable assets for tasks like rapid victim localization and the exploration of hazardous, otherwise unreachable areas. However, their reliance on battery power and the need for persistent, low-latency communication limit operational time and mobility. To address this, and considering the evolving capabilities of 5G/6G networks, we propose a novel SAR framework that includes Mission Planning and Mission Execution phases and that optimizes robot deployment. By considering parameters such as the exploration area size, terrain elevation, robot fleet size, communication-influenced energy profiles, desired exploration rate, and target response time, our framework determines the minimum number of robots required and their optimal paths to ensure effective coverage and timely data backhaul over mobile networks. Our results demonstrate the trade-offs between number of robots, explored area, and response time for wheeled and quadruped robots. Further, we quantify the impact of terrain elevation data on mission time and energy consumption, showing the benefits of incorporating real-world environmental factors that might also affect mobile signal propagation and connectivity into SAR planning. This framework provides critical insights for leveraging next-generation mobile networks to enhance autonomous SAR operations.
Energy-aware Joint Orchestration of 5G and Robots: Experimental Testbed and Field Validation
Mar 25, 2025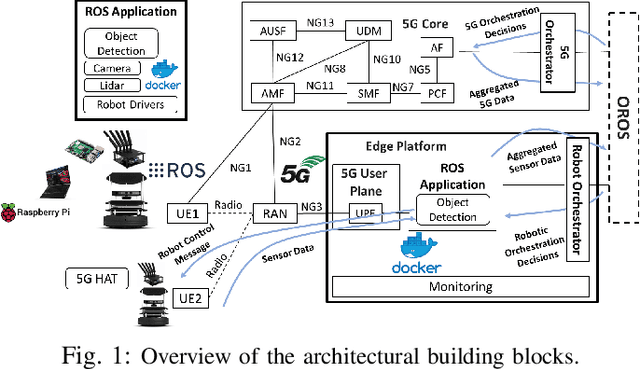
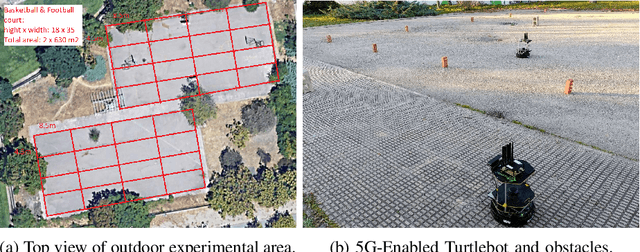
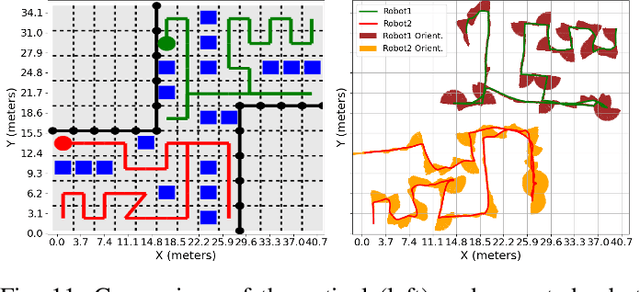
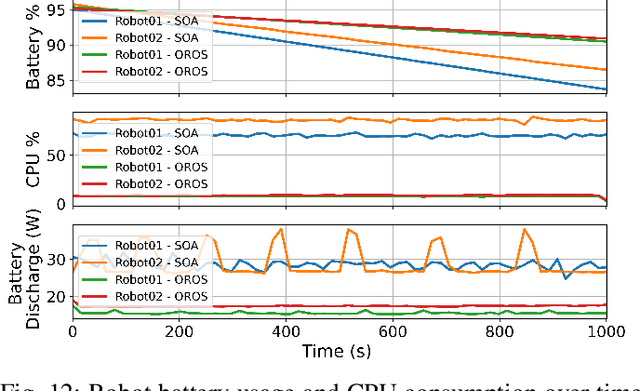
5G mobile networks introduce a new dimension for connecting and operating mobile robots in outdoor environments, leveraging cloud-native and offloading features of 5G networks to enable fully flexible and collaborative cloud robot operations. However, the limited battery life of robots remains a significant obstacle to their effective adoption in real-world exploration scenarios. This paper explores, via field experiments, the potential energy-saving gains of OROS, a joint orchestration of 5G and Robot Operating System (ROS) that coordinates multiple 5G-connected robots both in terms of navigation and sensing, as well as optimizes their cloud-native service resource utilization while minimizing total resource and energy consumption on the robots based on real-time feedback. We designed, implemented and evaluated our proposed OROS in an experimental testbed composed of commercial off-the-shelf robots and a local 5G infrastructure deployed on a campus. The experimental results demonstrated that OROS significantly outperforms state-of-the-art approaches in terms of energy savings by offloading demanding computational tasks to the 5G edge infrastructure and dynamic energy management of on-board sensors (e.g., switching them off when they are not needed). This strategy achieves approximately 15% energy savings on the robots, thereby extending battery life, which in turn allows for longer operating times and better resource utilization.
* 14 pages, 15 figures, journal
REACT: Multi Robot Energy-Aware Orchestrator for Indoor Search and Rescue Critical Tasks
Mar 07, 2025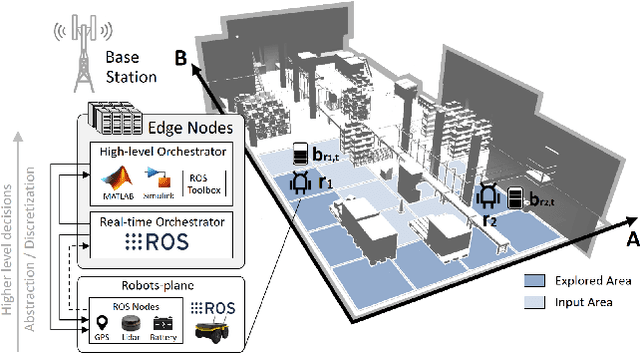
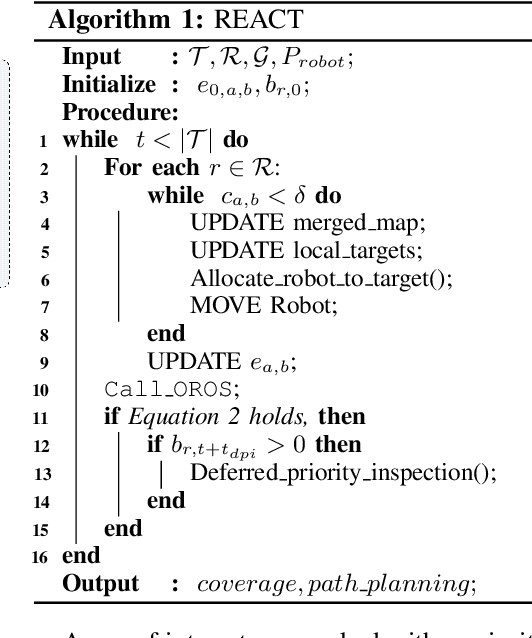
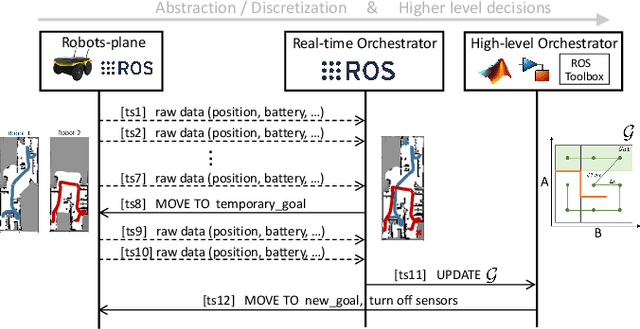
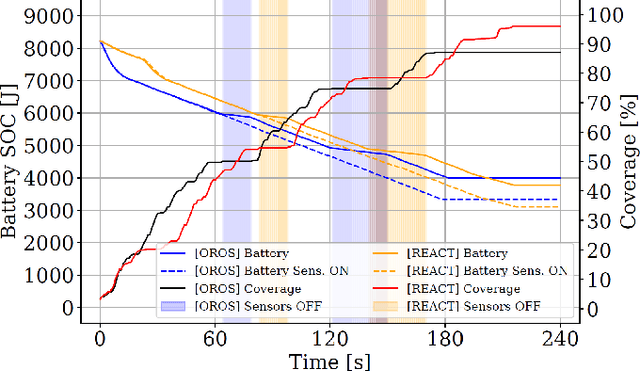
Smart factories enhance production efficiency and sustainability, but emergencies like human errors, machinery failures and natural disasters pose significant risks. In critical situations, such as fires or earthquakes, collaborative robots can assist first-responders by entering damaged buildings and locating missing persons, mitigating potential losses. Unlike previous solutions that overlook the critical aspect of energy management, in this paper we propose REACT, a smart energy-aware orchestrator that optimizes the exploration phase, ensuring prolonged operational time and effective area coverage. Our solution leverages a fleet of collaborative robots equipped with advanced sensors and communication capabilities to explore and navigate unknown indoor environments, such as smart factories affected by fires or earthquakes, with high density of obstacles. By leveraging real-time data exchange and cooperative algorithms, the robots dynamically adjust their paths, minimize redundant movements and reduce energy consumption. Extensive simulations confirm that our approach significantly improves the efficiency and reliability of search and rescue missions in complex indoor environments, improving the exploration rate by 10% over existing methods and reaching a map coverage of 97% under time critical operations, up to nearly 100% under relaxed time constraint.
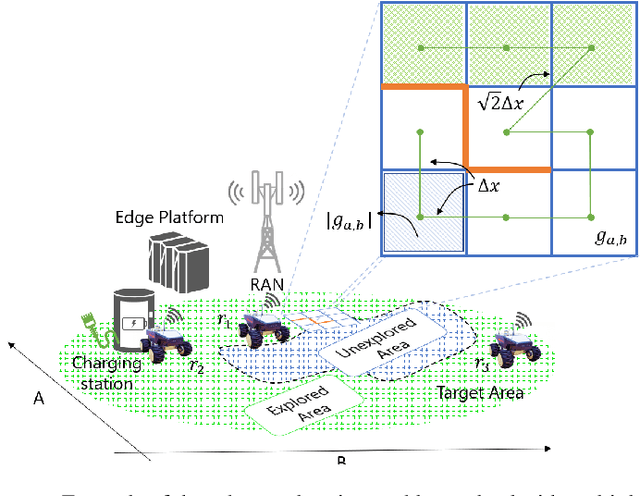
Cellular-enabled Collaborative Robots Planning and Operations for Search-and-Rescue Scenarios
Mar 14, 2024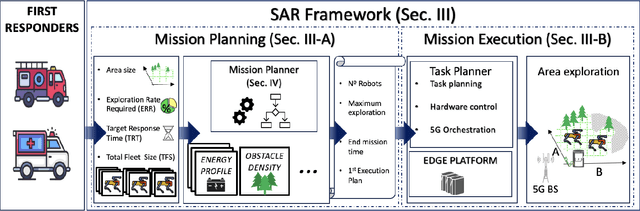
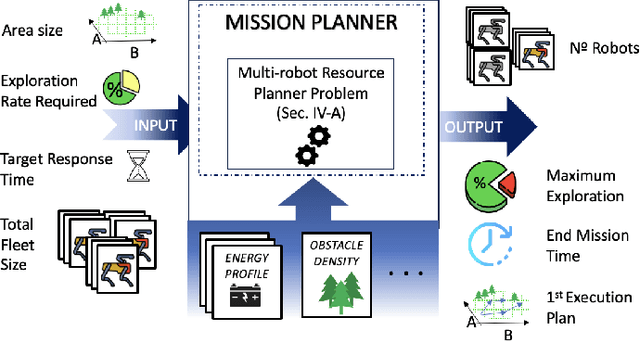
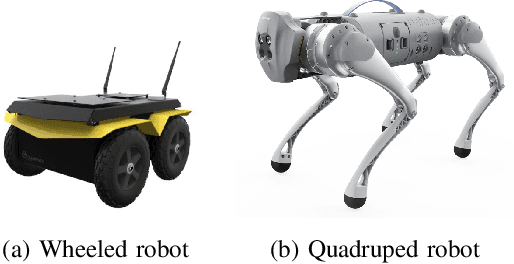
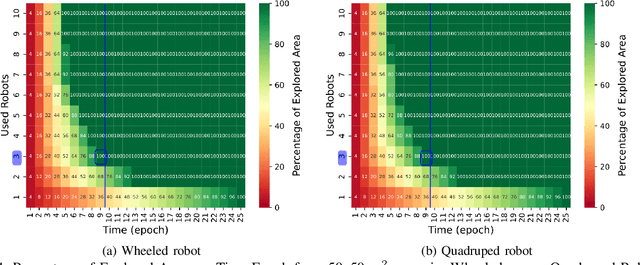
Mission-critical operations, particularly in the context of Search-and-Rescue (SAR) and emergency response situations, demand optimal performance and efficiency from every component involved to maximize the success probability of such operations. In these settings, cellular-enabled collaborative robotic systems have emerged as invaluable assets, assisting first responders in several tasks, ranging from victim localization to hazardous area exploration. However, a critical limitation in the deployment of cellular-enabled collaborative robots in SAR missions is their energy budget, primarily supplied by batteries, which directly impacts their task execution and mobility. This paper tackles this problem, and proposes a search-and-rescue framework for cellular-enabled collaborative robots use cases that, taking as input the area size to be explored, the robots fleet size, their energy profile, exploration rate required and target response time, finds the minimum number of robots able to meet the SAR mission goals and the path they should follow to explore the area. Our results, i) show that first responders can rely on a SAR cellular-enabled robotics framework when planning mission-critical operations to take informed decisions with limited resources, and, ii) illustrate the number of robots versus explored area and response time trade-off depending on the type of robot: wheeled vs quadruped.
On the Feasibility of Battery-Less LoRaWAN Communications using Energy Harvesting
Feb 09, 2024



From the outset, batteries have been the main power source for the Internet of Things (IoT). However, replacing and disposing of billions of dead batteries per year is costly in terms of maintenance and ecologically irresponsible. Since batteries are one of the greatest threats to a sustainable IoT, battery-less devices are the solution to this problem. These devices run on long-lived capacitors charged using various forms of energy harvesting, which results in intermittent on-off device behaviour. In this work, we model this intermittent battery-less behaviour for LoRaWAN devices. This model allows us to characterize the performance with the aim to determine under which conditions a LoRaWAN device can work without batteries, and how its parameters should be configured. Results show that the reliability directly depends on device configurations (i.e., capacitor size, turn-on voltage threshold), application behaviour (i.e., transmission interval, packet size) and environmental conditions (i.e., energy harvesting rate).
Analytical Modelling of Raw Data for Flow-Guided In-body Nanoscale Localization
Sep 27, 2023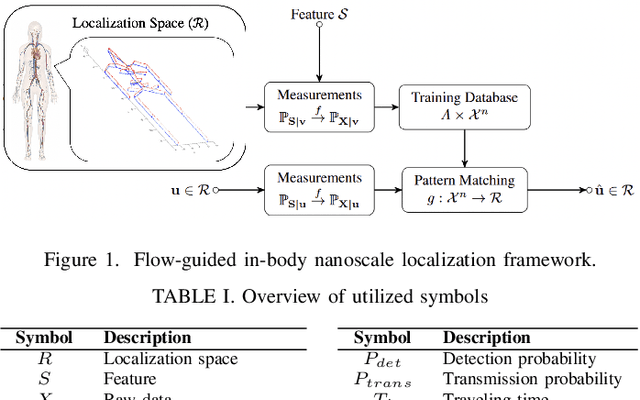
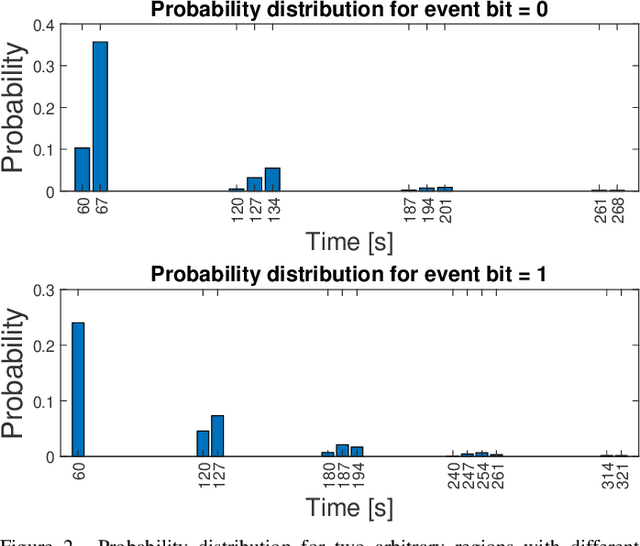

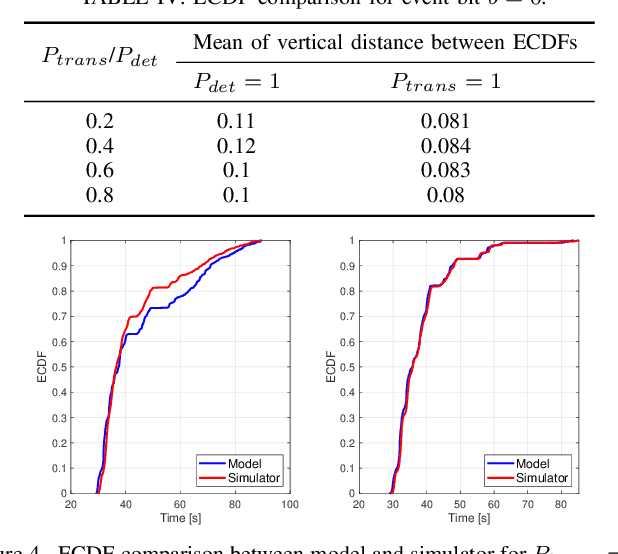
Advancements in nanotechnology and material science are paving the way toward nanoscale devices that combine sensing, computing, data and energy storage, and wireless communication. In precision medicine, these nanodevices show promise for disease diagnostics, treatment, and monitoring from within the patients' bloodstreams. Assigning the location of a sensed biological event with the event itself, which is the main proposition of flow-guided in-body nanoscale localization, would be immensely beneficial from the perspective of precision medicine. The nanoscale nature of the nanodevices and the challenging environment that the bloodstream represents, result in current flow-guided localization approaches being constrained in their communication and energy-related capabilities. The communication and energy constraints of the nanodevices result in different features of raw data for flow-guided localization, in turn affecting its performance. An analytical modeling of the effects of imperfect communication and constrained energy causing intermittent operation of the nanodevices on the raw data produced by the nanodevices would be beneficial. Hence, we propose an analytical model of raw data for flow-guided localization, where the raw data is modeled as a function of communication and energy-related capabilities of the nanodevice. We evaluate the model by comparing its output with the one obtained through the utilization of a simulator for objective evaluation of flow-guided localization, featuring comparably higher level of realism. Our results across a number of scenarios and heterogeneous performance metrics indicate high similarity between the model and simulator-generated raw datasets.
OROS: Orchestrating ROS-driven Collaborative Connected Robots in Mission-Critical Operations
May 06, 2022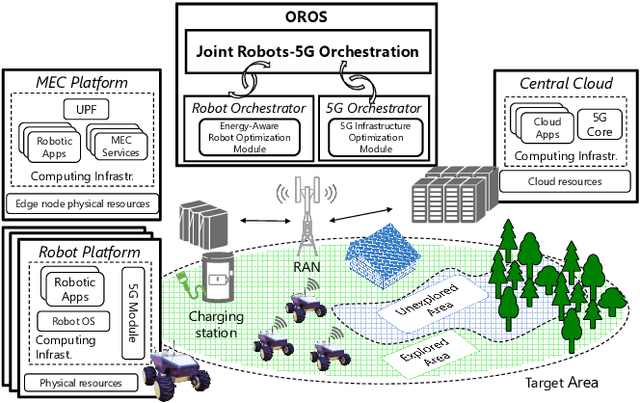


Battery life for collaborative robotics scenarios is a key challenge limiting operational uses and deployment in real life. Mission-Critical tasks are among the most relevant and challenging scenarios. As multiple and heterogeneous on-board sensors are required to explore unknown environments in simultaneous localization and mapping (SLAM) tasks, battery life problems are further exacerbated. Given the time-sensitivity of mission-critical operations, the successful completion of specific tasks in the minimum amount of time is of paramount importance. In this paper, we analyze the benefits of 5G-enabled collaborative robots by enhancing the Robot Operating System (ROS) capabilities with network orchestration features for energy-saving purposes. We propose OROS, a novel orchestration approach that minimizes mission-critical task completion times of 5G-connected robots by jointly optimizing robotic navigation and sensing together with infrastructure resources. Our results show that OROS significantly outperforms state-of-the-art solutions in exploration tasks completion times by exploiting 5G orchestration features for battery life extension.