 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Emotion Recognition with 3D Pointclouds Obtained from Facial Expression Images
Mar 29, 2026Facial Emotion Recognition is a critical research area within Affective Computing due to its wide-ranging applications in Human Computer Interaction, mental health assessment and fatigue monitoring. Current FER methods predominantly rely on Deep Learning techniques trained on 2D image data, which pose significant privacy concerns and are unsuitable for continuous, real-time monitoring. As an alternative, we propose High-Frequency Wireless Sensing (HFWS) as an enabler of continuous, privacy-aware FER, through the generation of detailed 3D facial pointclouds via on-person sensors embedded in wearables. We present arguments supporting the privacy advantages of HFWS over traditional 2D imaging, particularly under increasingly stringent data protection regulations. A major barrier to adopting HFWS for FER is the scarcity of labeled 3D FER datasets. Towards addressing this issue, we introduce a FLAME-based method to generate 3D facial pointclouds from existing public 2D datasets. Using this approach, we create AffectNet3D, a 3D version of the AffectNet database. To evaluate the quality and usability of the generated data, we design a pointcloud refinement pipeline focused on isolating the facial region, and train the popular PointNet++ model on the refined pointclouds. Fine-tuning the model on a small subset of the unseen 3D FER dataset BU-3DFE yields a classification accuracy exceeding 70%, comparable to oracle-level performance. To further investigate the potential of HFWS-based FER for continuous monitoring, we simulate wearable sensing conditions by masking portions of the generated pointclouds. Experimental results show that models trained on AffectNet3D and fine-tuned with just 25% of BU-3DFE outperform those trained solely on BU-3DFE. These findings highlight the viability of our pipeline and support the feasibility of continuous, privacy-aware FER via wearable HFWS systems.
Neural 3D Object Reconstruction with Small-Scale Unmanned Aerial Vehicles
Sep 15, 2025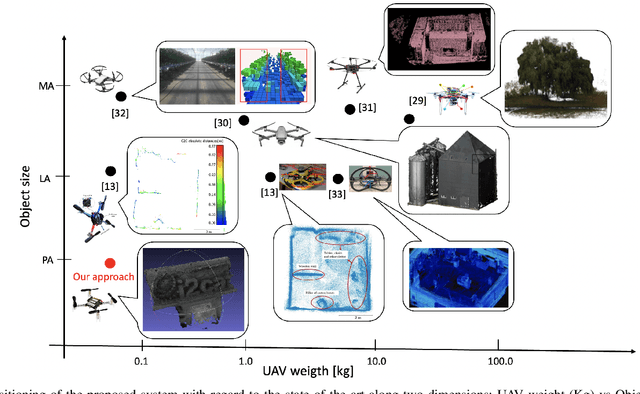
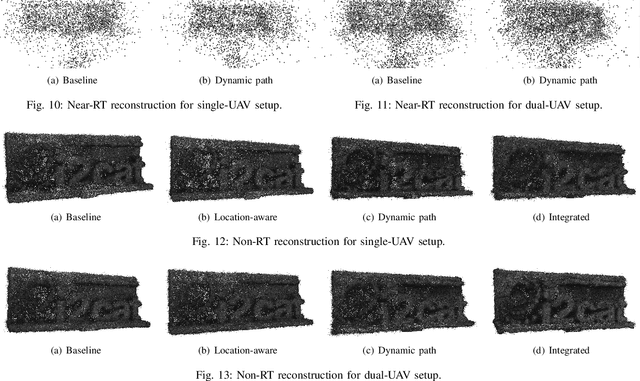
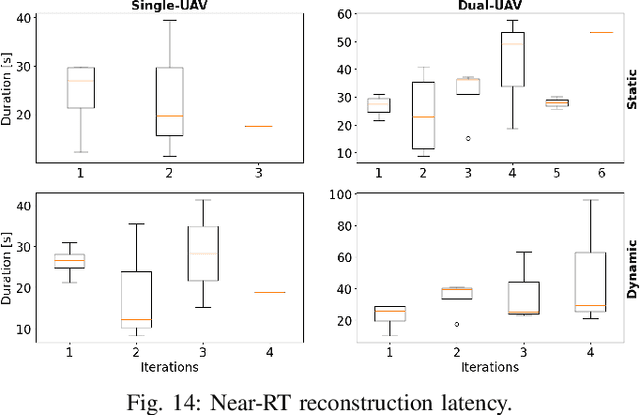
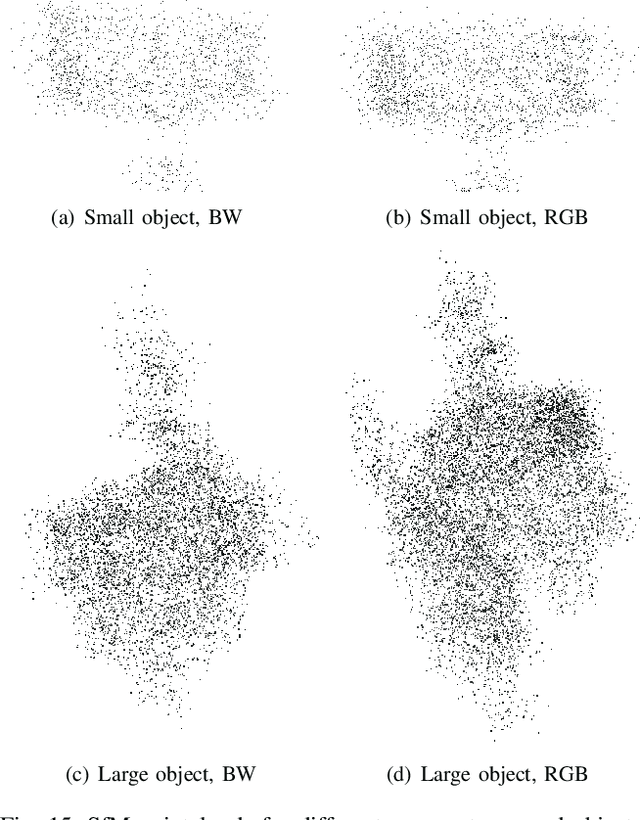
Small Unmanned Aerial Vehicles (UAVs) exhibit immense potential for navigating indoor and hard-to-reach areas, yet their significant constraints in payload and autonomy have largely prevented their use for complex tasks like high-quality 3-Dimensional (3D) reconstruction. To overcome this challenge, we introduce a novel system architecture that enables fully autonomous, high-fidelity 3D scanning of static objects using UAVs weighing under 100 grams. Our core innovation lies in a dual-reconstruction pipeline that creates a real-time feedback loop between data capture and flight control. A near-real-time (near-RT) process uses Structure from Motion (SfM) to generate an instantaneous pointcloud of the object. The system analyzes the model quality on the fly and dynamically adapts the UAV's trajectory to intelligently capture new images of poorly covered areas. This ensures comprehensive data acquisition. For the final, detailed output, a non-real-time (non-RT) pipeline employs a Neural Radiance Fields (NeRF)-based Neural 3D Reconstruction (N3DR) approach, fusing SfM-derived camera poses with precise Ultra Wide-Band (UWB) location data to achieve superior accuracy. We implemented and validated this architecture using Crazyflie 2.1 UAVs. Our experiments, conducted in both single- and multi-UAV configurations, conclusively show that dynamic trajectory adaptation consistently improves reconstruction quality over static flight paths. This work demonstrates a scalable and autonomous solution that unlocks the potential of miniaturized UAVs for fine-grained 3D reconstruction in constrained environments, a capability previously limited to much larger platforms.
Experimental Assessment of A Framework for In-body RF-backscattering Localization
Jun 24, 2025Localization of in-body devices is beneficial for Gastrointestinal (GI) diagnosis and targeted treatment. Traditional methods such as imaging and endoscopy are invasive and limited in resolution, highlighting the need for innovative alternatives. This study presents an experimental framework for Radio Frequency (RF)-backscatter-based in-body localization, inspired by the ReMix approach, and evaluates its performance in real-world conditions. The experimental setup includes an in-body backscatter device and various off-body antenna configurations to investigate harmonic generation and reception in air, chicken and pork tissues. The results indicate that optimal backscatter device positioning, antenna selection, and gain settings significantly impact performance, with denser biological tissues leading to greater attenuation. The study also highlights challenges such as external interference and plastic enclosures affecting propagation. The findings emphasize the importance of interference mitigation and refined propagation models to enhance performance.
Experimental Assessment of Neural 3D Reconstruction for Small UAV-based Applications
Jun 24, 2025



The increasing miniaturization of Unmanned Aerial Vehicles (UAVs) has expanded their deployment potential to indoor and hard-to-reach areas. However, this trend introduces distinct challenges, particularly in terms of flight dynamics and power consumption, which limit the UAVs' autonomy and mission capabilities. This paper presents a novel approach to overcoming these limitations by integrating Neural 3D Reconstruction (N3DR) with small UAV systems for fine-grained 3-Dimensional (3D) digital reconstruction of small static objects. Specifically, we design, implement, and evaluate an N3DR-based pipeline that leverages advanced models, i.e., Instant-ngp, Nerfacto, and Splatfacto, to improve the quality of 3D reconstructions using images of the object captured by a fleet of small UAVs. We assess the performance of the considered models using various imagery and pointcloud metrics, comparing them against the baseline Structure from Motion (SfM) algorithm. The experimental results demonstrate that the N3DR-enhanced pipeline significantly improves reconstruction quality, making it feasible for small UAVs to support high-precision 3D mapping and anomaly detection in constrained environments. In more general terms, our results highlight the potential of N3DR in advancing the capabilities of miniaturized UAV systems.
Generating Realistic Synthetic Head Rotation Data for Extended Reality using Deep Learning
Jan 15, 2025



Extended Reality is a revolutionary method of delivering multimedia content to users. A large contributor to its popularity is the sense of immersion and interactivity enabled by having real-world motion reflected in the virtual experience accurately and immediately. This user motion, mainly caused by head rotations, induces several technical challenges. For instance, which content is generated and transmitted depends heavily on where the user is looking. Seamless systems, taking user motion into account proactively, will therefore require accurate predictions of upcoming rotations. Training and evaluating such predictors requires vast amounts of orientational input data, which is expensive to gather, as it requires human test subjects. A more feasible approach is to gather a modest dataset through test subjects, and then extend it to a more sizeable set using synthetic data generation methods. In this work, we present a head rotation time series generator based on TimeGAN, an extension of the well-known Generative Adversarial Network, designed specifically for generating time series. This approach is able to extend a dataset of head rotations with new samples closely matching the distribution of the measured time series.
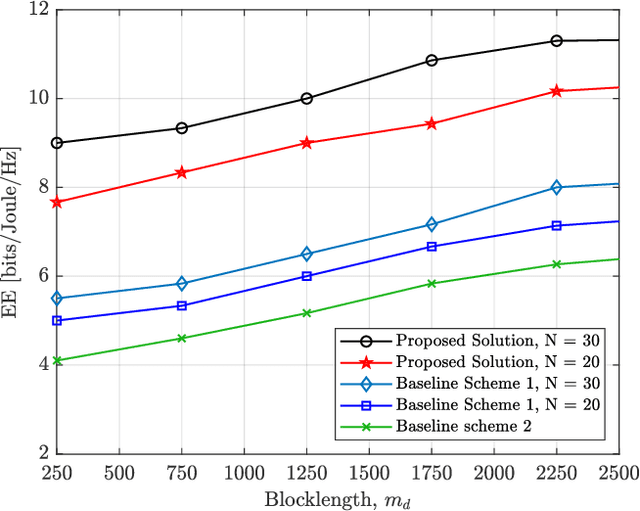
Miniature UAV Empowered Reconfigurable Energy Harvesting Holographic Surfaces in THz Cooperative Networks
Nov 27, 2024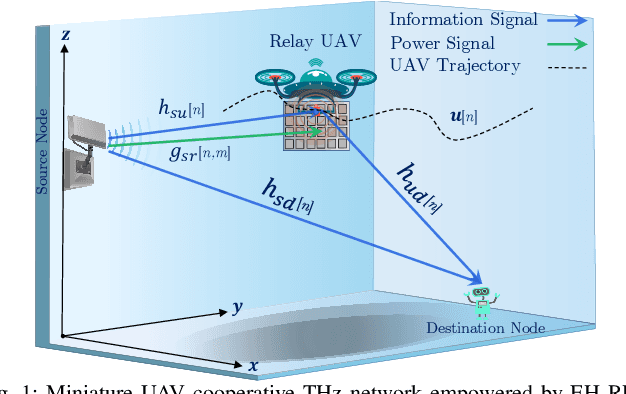
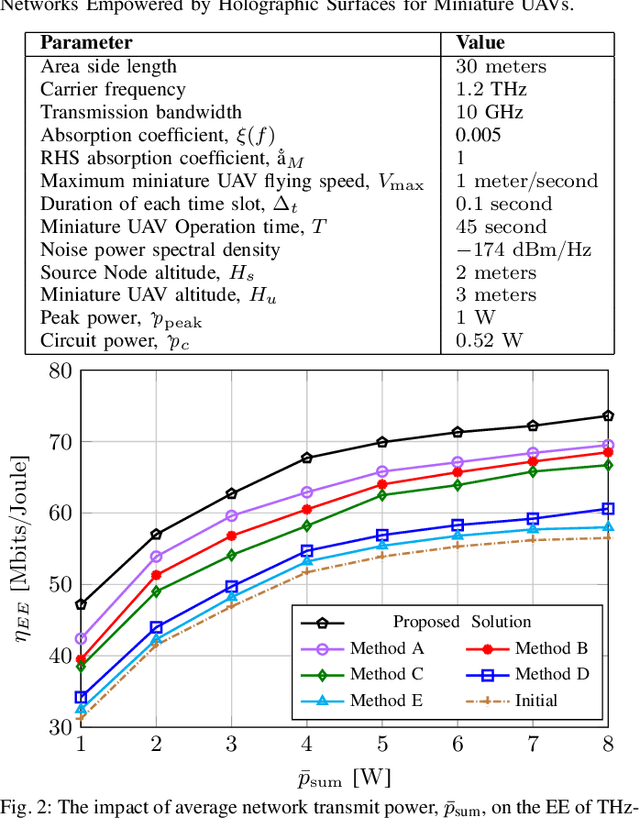
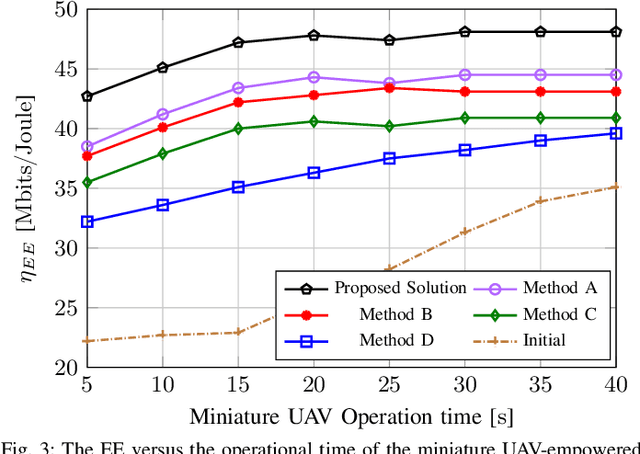
This paper focuses on enhancing the energy efficiency (EE) of a cooperative network featuring a `miniature' unmanned aerial vehicle (UAV) that operates at terahertz (THz) frequencies, utilizing holographic surfaces to improve the network's performance. Unlike traditional reconfigurable intelligent surfaces (RIS) that are typically used as passive relays to adjust signal reflections, this work introduces a novel concept: Energy harvesting (EH) using reconfigurable holographic surfaces (RHS) mounted on the miniature UAV. In this system, a source node facilitates the simultaneous reception of information and energy signals by the UAV, with the harvested energy from the RHS being used by the UAV to transmit data to a specific destination. The EE optimization involves adjusting non-orthogonal multiple access (NOMA) power coefficients and the UAV's flight path, considering the peculiarities of the THz channel. The optimization problem is solved in two steps. Initially, the trajectory is refined using a successive convex approximation (SCA) method, followed by the adjustment of NOMA power coefficients through a quadratic transform technique. The effectiveness of the proposed algorithm is demonstrated through simulations, showing superior results when compared to baseline methods.
Tailoring Graph Neural Network-based Flow-guided Localization to Individual Bloodstreams and Activities
Aug 02, 2024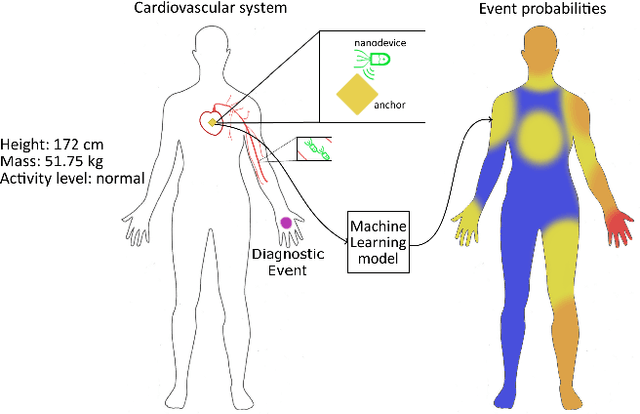
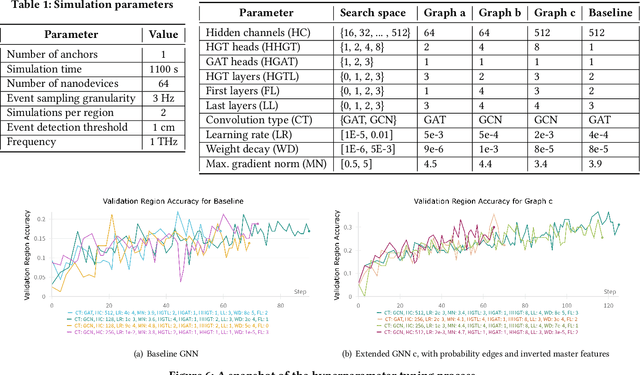
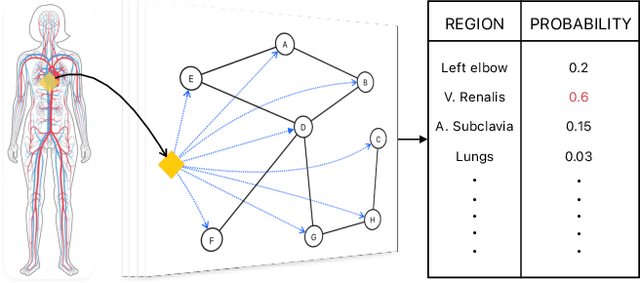
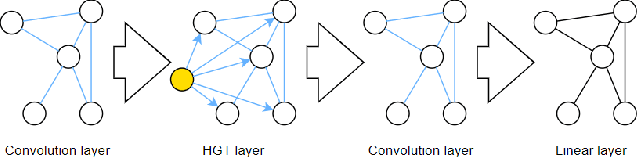
Flow-guided localization using in-body nanodevices in the bloodstream is expected to be beneficial for early disease detection, continuous monitoring of biological conditions, and targeted treatment. The nanodevices face size and power constraints that produce erroneous raw data for localization purposes. On-body anchors receive this data, and use it to derive the locations of diagnostic events of interest. Different Machine Learning (ML) approaches have been recently proposed for this task, yet they are currently restricted to a reference bloodstream of a resting patient. As such, they are unable to deal with the physical diversity of patients' bloodstreams and cannot provide continuous monitoring due to changes in individual patient's activities. Toward addressing these issues for the current State-of-the-Art (SotA) flow-guided localization approach based on Graph Neural Networks (GNNs), we propose a pipeline for GNN adaptation based on individual physiological indicators including height, weight, and heart rate. Our results indicate that the proposed adaptions are beneficial in reconciling the individual differences between bloodstreams and activities.
Multi-Gigabit Interactive Extended Reality over Millimeter-Wave: An End-to-End System Approach
May 24, 2024
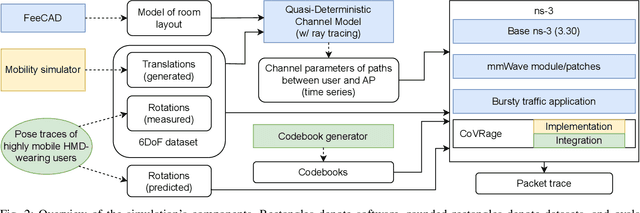
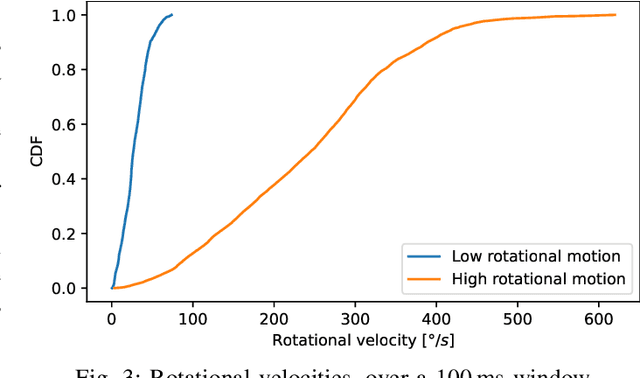
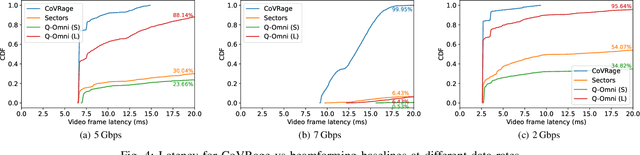
Achieving high-quality wireless interactive Extended Reality (XR) will require multi-gigabit throughput at extremely low latency. The Millimeter-Wave (mmWave) frequency bands, between 24 and 300GHz, can achieve such extreme performance. However, maintaining a consistently high Quality of Experience with highly mobile users is challenging, as mmWave communications are inherently directional. In this work, we present and evaluate an end-to-end approach to such a mmWave-based mobile XR system. We perform a highly realistic simulation of the system, incorporating accurate XR data traffic, detailed mmWave propagation models and actual user motion. We evaluate the impact of the beamforming strategy and frequency on the overall performance. In addition, we provide the first system-level evaluation of the CoVRage algorithm, a proactive and spatially aware user-side beamforming approach designed specifically for highly mobile XR environments.
Analytical Modelling of Raw Data for Flow-Guided In-body Nanoscale Localization
Sep 27, 2023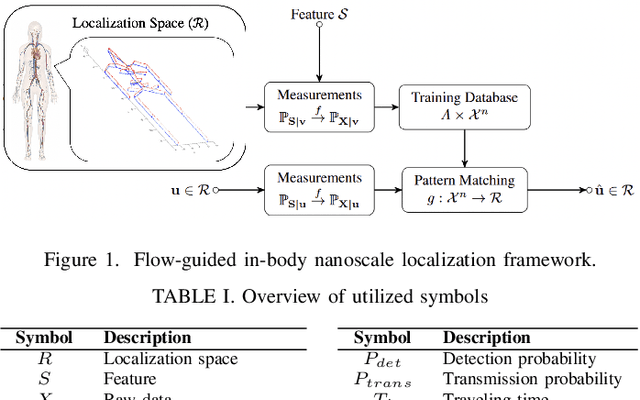
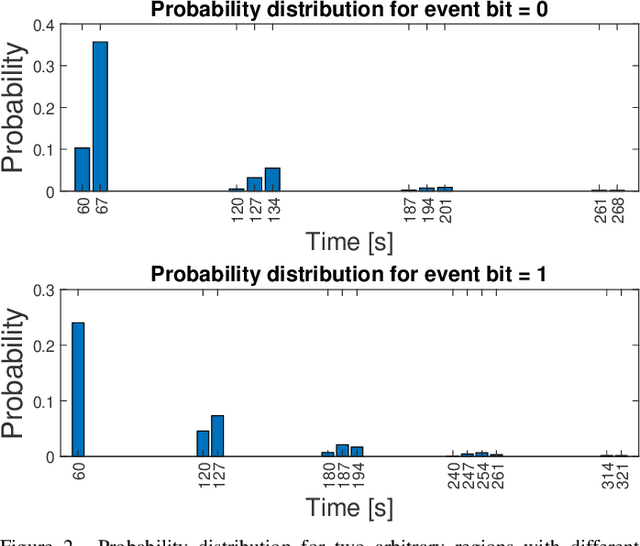

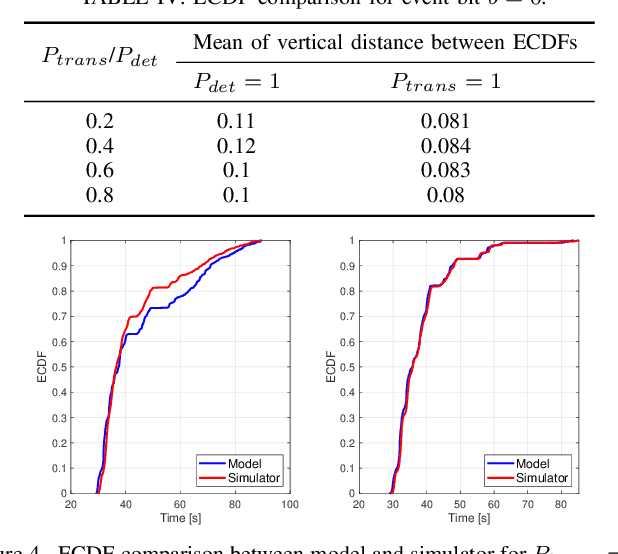
Advancements in nanotechnology and material science are paving the way toward nanoscale devices that combine sensing, computing, data and energy storage, and wireless communication. In precision medicine, these nanodevices show promise for disease diagnostics, treatment, and monitoring from within the patients' bloodstreams. Assigning the location of a sensed biological event with the event itself, which is the main proposition of flow-guided in-body nanoscale localization, would be immensely beneficial from the perspective of precision medicine. The nanoscale nature of the nanodevices and the challenging environment that the bloodstream represents, result in current flow-guided localization approaches being constrained in their communication and energy-related capabilities. The communication and energy constraints of the nanodevices result in different features of raw data for flow-guided localization, in turn affecting its performance. An analytical modeling of the effects of imperfect communication and constrained energy causing intermittent operation of the nanodevices on the raw data produced by the nanodevices would be beneficial. Hence, we propose an analytical model of raw data for flow-guided localization, where the raw data is modeled as a function of communication and energy-related capabilities of the nanodevice. We evaluate the model by comparing its output with the one obtained through the utilization of a simulator for objective evaluation of flow-guided localization, featuring comparably higher level of realism. Our results across a number of scenarios and heterogeneous performance metrics indicate high similarity between the model and simulator-generated raw datasets.
Toward Energy Efficient Multiuser IRS-Assisted URLLC Systems: A Novel Rank Relaxation Method
Sep 26, 2023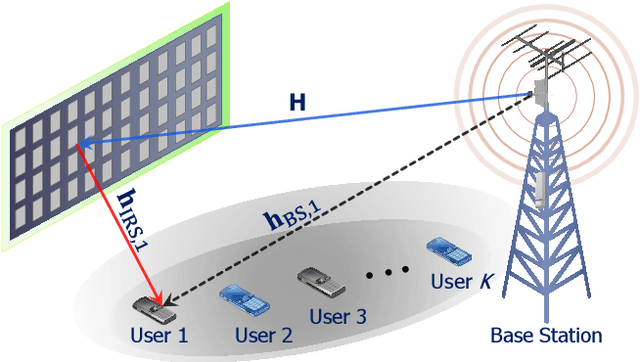
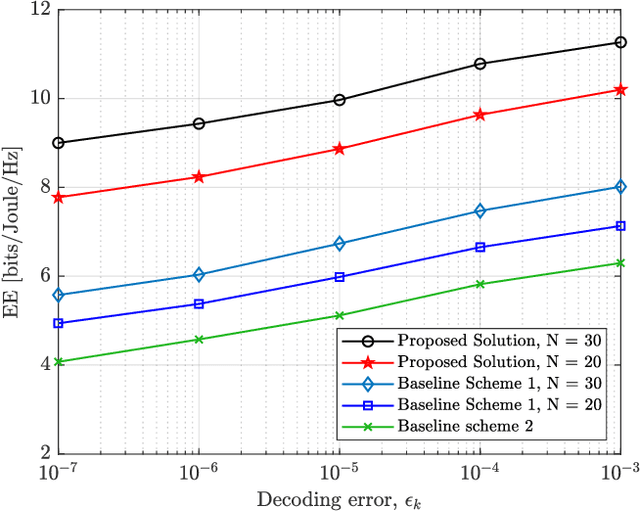
This paper proposes an energy efficient resource allocation design algorithm for an intelligent reflecting surface (IRS)-assisted downlink ultra-reliable low-latency communication (URLLC) network. This setup features a multi-antenna base station (BS) transmitting data traffic to a group of URLLC users with short packet lengths. We maximize the total network's energy efficiency (EE) through the optimization of active beamformers at the BS and passive beamformers (a.k.a. phase shifts) at the IRS. The main non-convex problem is divided into two sub-problems. An alternating optimization (AO) approach is then used to solve the problem. Through the use of the successive convex approximation (SCA) with a novel iterative rank relaxation method, we construct a concave-convex objective function for each sub-problem. The first sub-problem is a fractional program that is solved using the Dinkelbach method and a penalty-based approach. The second sub-problem is then solved based on semi-definite programming (SDP) and the penalty-based approach. The iterative solution gradually approaches the rank-one for both the active beamforming and unit modulus IRS phase-shift sub-problems. Our results demonstrate the efficacy of the proposed solution compared to existing benchmarks.