 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapViT: A Two-Stage ViT-Based Framework for Real-Time Radio Quality Map Prediction in Dynamic Environments
Jan 22, 2026Recent advancements in mobile and wireless networks are unlocking the full potential of robotic autonomy, enabling robots to take advantage of ultra-low latency, high data throughput, and ubiquitous connectivity. However, for robots to navigate and operate seamlessly, efficiently and reliably, they must have an accurate understanding of both their surrounding environment and the quality of radio signals. Achieving this in highly dynamic and ever-changing environments remains a challenging and largely unsolved problem. In this paper, we introduce MapViT, a two-stage Vision Transformer (ViT)-based framework inspired by the success of pre-train and fine-tune paradigm for Large Language Models (LLMs). MapViT is designed to predict both environmental changes and expected radio signal quality. We evaluate the framework using a set of representative Machine Learning (ML) models, analyzing their respective strengths and limitations across different scenarios. Experimental results demonstrate that the proposed two-stage pipeline enables real-time prediction, with the ViT-based implementation achieving a strong balance between accuracy and computational efficiency. This makes MapViT a promising solution for energy- and resource-constrained platforms such as mobile robots. Moreover, the geometry foundation model derived from the self-supervised pre-training stage improves data efficiency and transferability, enabling effective downstream predictions even with limited labeled data. Overall, this work lays the foundation for next-generation digital twin ecosystems, and it paves the way for a new class of ML foundation models driving multi-modal intelligence in future 6G-enabled systems.
AI-Assisted NLOS Sensing for RIS-Based Indoor Localization in Smart Factories
May 21, 2025In the era of Industry 4.0, precise indoor localization is vital for automation and efficiency in smart factories. Reconfigurable Intelligent Surfaces (RIS) are emerging as key enablers in 6G networks for joint sensing and communication. However, RIS faces significant challenges in Non-Line-of-Sight (NLOS) and multipath propagation, particularly in localization scenarios, where detecting NLOS conditions is crucial for ensuring not only reliable results and increased connectivity but also the safety of smart factory personnel. This study introduces an AI-assisted framework employing a Convolutional Neural Network (CNN) customized for accurate Line-of-Sight (LOS) and Non-Line-of-Sight (NLOS) classification to enhance RIS-based localization using measured, synthetic, mixed-measured, and mixed-synthetic experimental data, that is, original, augmented, slightly noisy, and highly noisy data, respectively. Validated through such data from three different environments, the proposed customized-CNN (cCNN) model achieves {95.0\%-99.0\%} accuracy, outperforming standard pre-trained models like Visual Geometry Group 16 (VGG-16) with an accuracy of {85.5\%-88.0\%}. By addressing RIS limitations in NLOS scenarios, this framework offers scalable and high-precision localization solutions for 6G-enabled smart factories.
Tailoring Graph Neural Network-based Flow-guided Localization to Individual Bloodstreams and Activities
Aug 02, 2024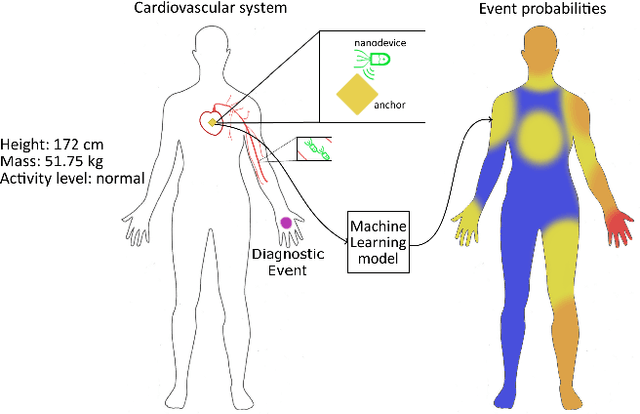
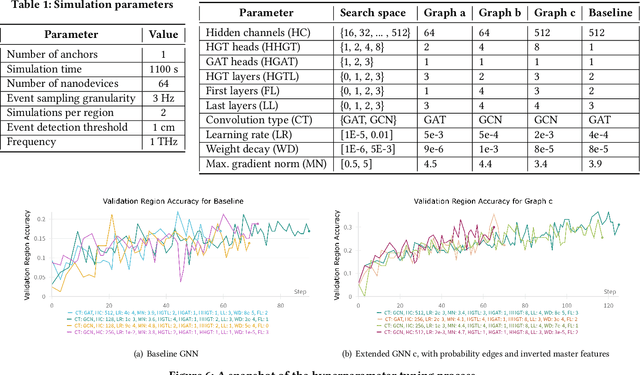
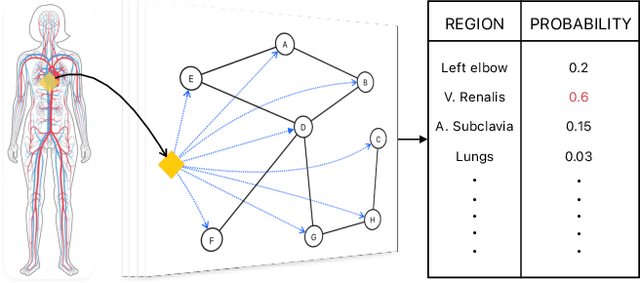
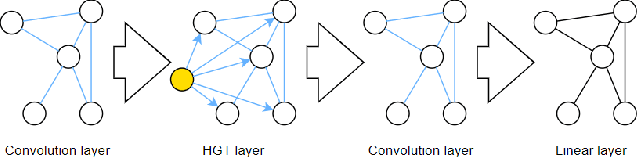
Flow-guided localization using in-body nanodevices in the bloodstream is expected to be beneficial for early disease detection, continuous monitoring of biological conditions, and targeted treatment. The nanodevices face size and power constraints that produce erroneous raw data for localization purposes. On-body anchors receive this data, and use it to derive the locations of diagnostic events of interest. Different Machine Learning (ML) approaches have been recently proposed for this task, yet they are currently restricted to a reference bloodstream of a resting patient. As such, they are unable to deal with the physical diversity of patients' bloodstreams and cannot provide continuous monitoring due to changes in individual patient's activities. Toward addressing these issues for the current State-of-the-Art (SotA) flow-guided localization approach based on Graph Neural Networks (GNNs), we propose a pipeline for GNN adaptation based on individual physiological indicators including height, weight, and heart rate. Our results indicate that the proposed adaptions are beneficial in reconciling the individual differences between bloodstreams and activities.