 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAWN: A MultiEncoder Fusion-Attention Wave Network for Integrated Sensing and Communication Indoor Scene Inference
Sep 18, 2025



The upcoming generations of wireless technologies promise an era where everything is interconnected and intelligent. As the need for intelligence grows, networks must learn to better understand the physical world. However, deploying dedicated hardware to perceive the environment is not always feasible, mainly due to costs and/or complexity. Integrated Sensing and Communication (ISAC) has made a step forward in addressing this challenge. Within ISAC, passive sensing emerges as a cost-effective solution that reuses wireless communications to sense the environment, without interfering with existing communications. Nevertheless, the majority of current solutions are limited to one technology (mostly Wi-Fi or 5G), constraining the maximum accuracy reachable. As different technologies work with different spectrums, we see a necessity in integrating more than one technology to augment the coverage area. Hence, we take the advantage of ISAC passive sensing, to present FAWN, a MultiEncoder Fusion-Attention Wave Network for ISAC indoor scene inference. FAWN is based on the original transformers architecture, to fuse information from Wi-Fi and 5G, making the network capable of understanding the physical world without interfering with the current communication. To test our solution, we have built a prototype and integrated it in a real scenario. Results show errors below 0.6 m around 84% of times.
802.11bf Multiband Passive Sensing: Reusing Wi-Fi Signaling for Sensing
Jul 30, 2025This paper presents a novel multiband passive sensing system that leverages IEEE 802.11bf Wi-Fi signals for environmental sensing, focusing on both sub-7 GHz and millimeter-wave (mmWave) bands. By combining Channel State Information (CSI) from multiple bands, the system enhances accuracy and reliability in detecting human presence, movement, and activities in indoor environments. Utilizing a novel model, called MILAGRO, the system demonstrates robust performance across different scenarios, including monitoring human presence in workspaces and tracking movement in corridors. Experimental results show high accuracy (95-100%), with improved performance by integrating multiband data. The system also addresses key security concerns associated with passive sensing, proposing measures to mitigate potential risks. This work advances the use of Wi-Fi for passive sensing by reducing reliance on active sensing infrastructure and extending the capabilities of low-cost, non-intrusive environmental monitoring.
Cross-layer Integrated Sensing and Communication: A Joint Industrial and Academic Perspective
May 16, 2025



Integrated sensing and communication (ISAC) enables radio systems to simultaneously sense and communicate with their environment. This paper, developed within the Hexa-X-II project funded by the European Union, presents a comprehensive cross-layer vision for ISAC in 6G networks, integrating insights from physical-layer design, hardware architectures, AI-driven intelligence, and protocol-level innovations. We begin by revisiting the foundational principles of ISAC, highlighting synergies and trade-offs between sensing and communication across different integration levels. Enabling technologies, such as multiband operation, massive and distributed MIMO, non-terrestrial networks, reconfigurable intelligent surfaces, and machine learning, are analyzed in conjunction with hardware considerations including waveform design, synchronization, and full-duplex operation. To bridge implementation and system-level evaluation, we introduce a quantitative cross-layer framework linking design parameters to key performance and value indicators. By synthesizing perspectives from both academia and industry, this paper outlines how deeply integrated ISAC can transform 6G into a programmable and context-aware platform supporting applications from reliable wireless access to autonomous mobility and digital twinning.
Energy-aware Joint Orchestration of 5G and Robots: Experimental Testbed and Field Validation
Mar 25, 2025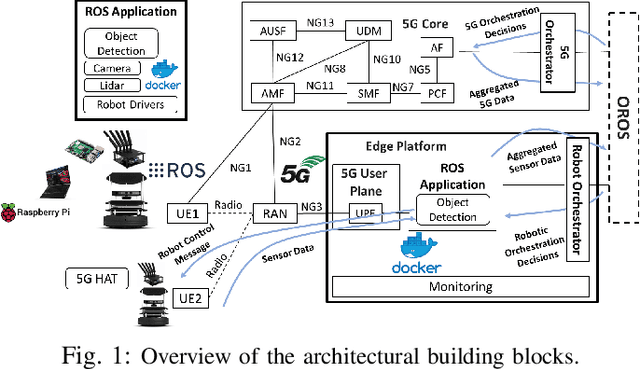
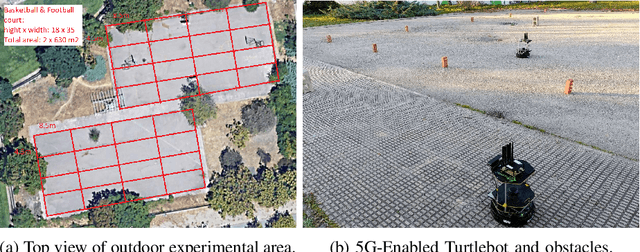
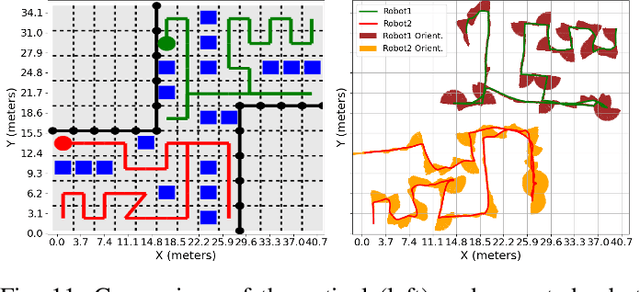
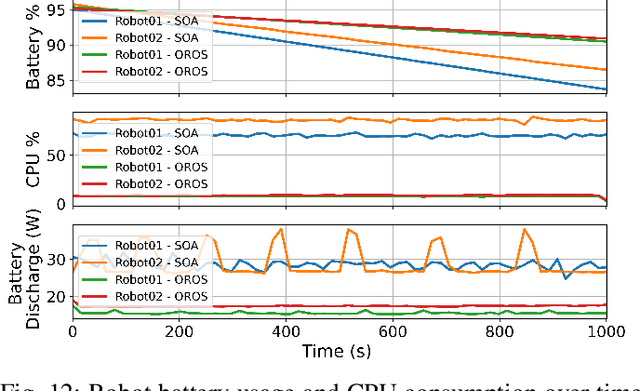
5G mobile networks introduce a new dimension for connecting and operating mobile robots in outdoor environments, leveraging cloud-native and offloading features of 5G networks to enable fully flexible and collaborative cloud robot operations. However, the limited battery life of robots remains a significant obstacle to their effective adoption in real-world exploration scenarios. This paper explores, via field experiments, the potential energy-saving gains of OROS, a joint orchestration of 5G and Robot Operating System (ROS) that coordinates multiple 5G-connected robots both in terms of navigation and sensing, as well as optimizes their cloud-native service resource utilization while minimizing total resource and energy consumption on the robots based on real-time feedback. We designed, implemented and evaluated our proposed OROS in an experimental testbed composed of commercial off-the-shelf robots and a local 5G infrastructure deployed on a campus. The experimental results demonstrated that OROS significantly outperforms state-of-the-art approaches in terms of energy savings by offloading demanding computational tasks to the 5G edge infrastructure and dynamic energy management of on-board sensors (e.g., switching them off when they are not needed). This strategy achieves approximately 15% energy savings on the robots, thereby extending battery life, which in turn allows for longer operating times and better resource utilization.
* 14 pages, 15 figures, journal
waveSLAM: Empowering Accurate Indoor Mapping Using Off-the-Shelf Millimeter-wave Self-sensing
Dec 12, 2023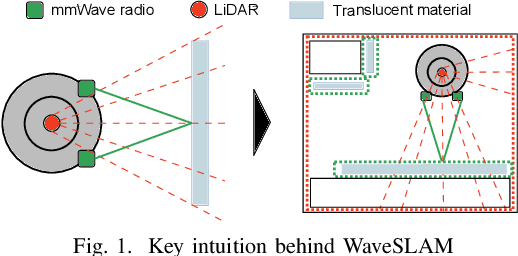

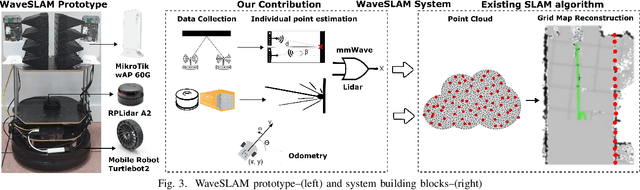

This paper presents the design, implementation and evaluation of waveSLAM, a low-cost mobile robot system that uses the millimetre wave (mmWave) communication devices to enhance the indoor mapping process targeting environments with reduced visibility or glass/mirror walls. A unique feature of waveSLAM is that it only leverages existing Commercial-Off-The-Shelf (COTS) hardware (Lidar and mmWave radios) that are mounted on mobile robots to improve the accurate indoor mapping achieved with optical sensors. The key intuition behind the waveSLAM design is that while the mobile robots moves freely, the mmWave radios can periodically exchange angle and distance estimates between themselves (self-sensing) by bouncing the signal from the environment, thus enabling accurate estimates of the target object/material surface. Our experiments verify that waveSLAM can archive cm-level accuracy with errors below 22 cm and 20deg in angle orientation which is compatible with Lidar when building indoor maps.
Orchestrating Networked Robotic Applications
Oct 25, 2022
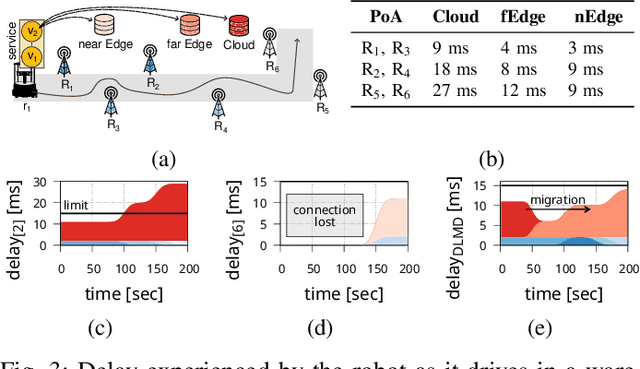
In this letter, we formulate the orchestration problem for networked robotic applications considering contextual information. Any solution to the proposed formulation provides adequate routing updates, migration, and radio handover decisions as the robot moves. We prove the NP-hard nature of the problem, and solve it for a remote driving robotic application with or without some contextual information, as in state-of-the-art. Results show that without contextual information it is impossible to meet the latency requirements of a remote-driving robotic application.
Choose, not Hoard: Information-to-Model Matching for Artificial Intelligence in O-RAN
Aug 01, 2022



Open Radio Access Network (O-RAN) is an emerging paradigm, whereby virtualized network infrastructure elements from different vendors communicate via open, standardized interfaces. A key element therein is the RAN Intelligent Controller (RIC), an Artificial Intelligence (AI)-based controller. Traditionally, all data available in the network has been used to train a single AI model to use at the RIC. In this paper we introduce, discuss, and evaluate the creation of multiple AI model instances at different RICs, leveraging information from some (or all) locations for their training. This brings about a flexible relationship between gNBs, the AI models used to control them, and the data such models are trained with. Experiments with real-world traces show how using multiple AI model instances that choose training data from specific locations improve the performance of traditional approaches.
FoReCo: a forecast-based recovery mechanism for real-time remote control of robotic manipulators
May 09, 2022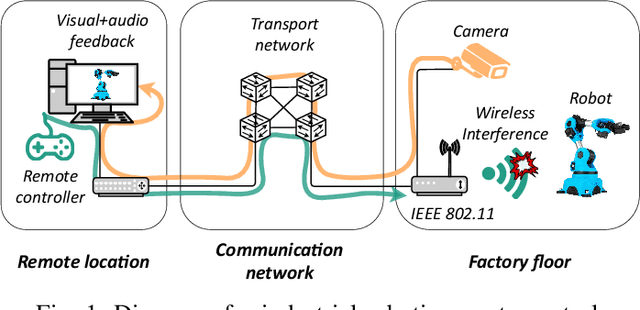
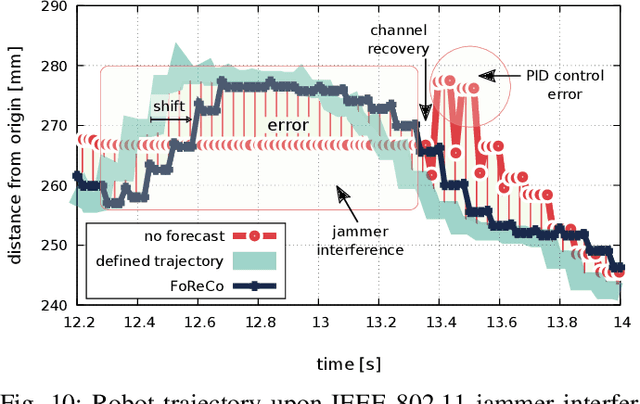
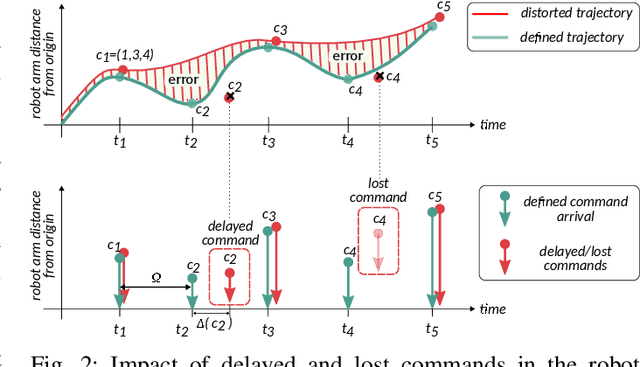
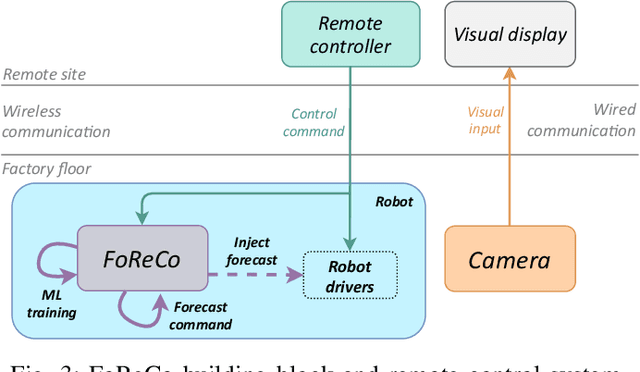
Wireless communications represent a game changer for future manufacturing plants, enabling flexible production chains as machinery and other components are not restricted to a location by the rigid wired connections on the factory floor. However, the presence of electromagnetic interference in the wireless spectrum may result in packet loss and delay, making it a challenging environment to meet the extreme reliability requirements of industrial applications. In such conditions, achieving real-time remote control, either from the Edge or Cloud, becomes complex. In this paper, we investigate a forecast-based recovery mechanism for real-time remote control of robotic manipulators (FoReCo) that uses Machine Learning (ML) to infer lost commands caused by interference in the wireless channel. FoReCo is evaluated through both simulation and experimentation in interference prone IEEE 802.11 wireless links, and using a commercial research robot that performs pick-and-place tasks. Results show that in case of interference, FoReCo trajectory error is decreased by x18 and x2 times in simulation and experimentation, and that FoReCo is sufficiently lightweight to be deployed in the hardware of already used in existing solutions.
COTORRA: COntext-aware Testbed fOR Robotic Applications
Jan 19, 2021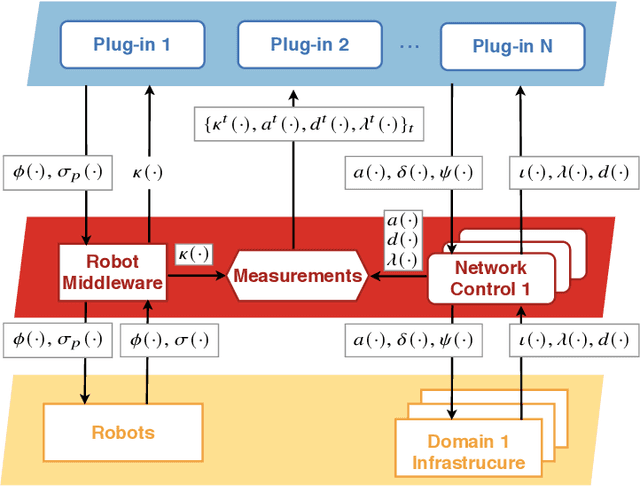
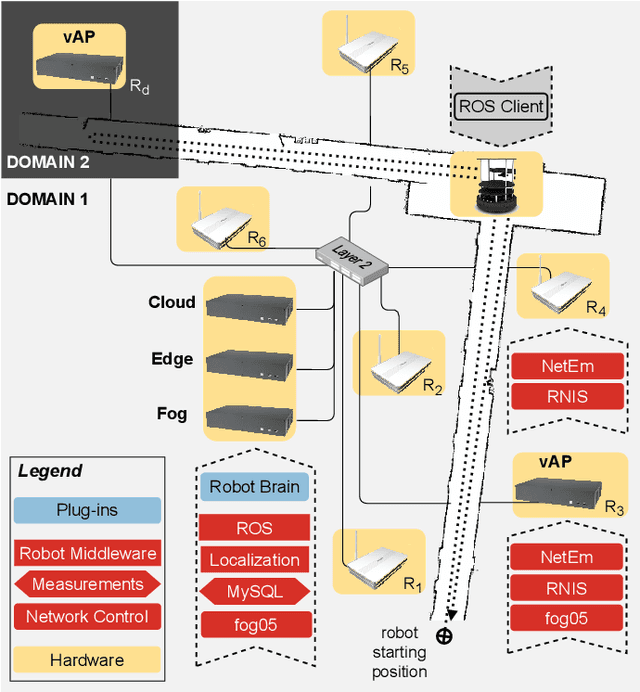
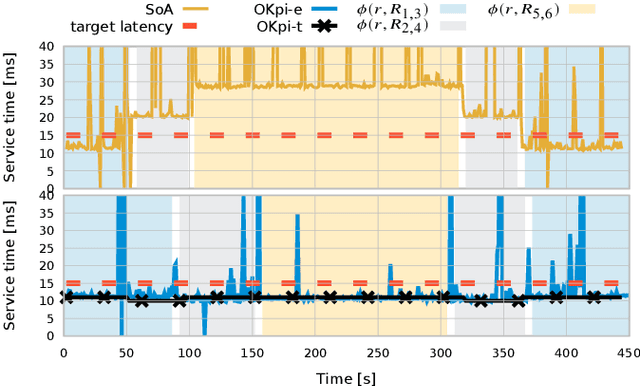
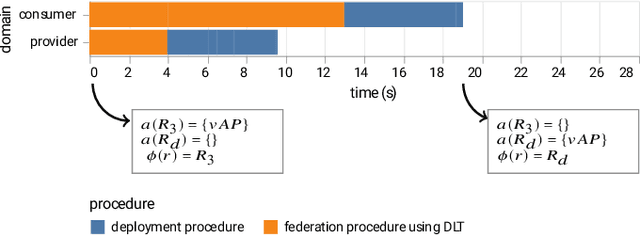
Edge & Fog computing have received considerable attention as promising candidates for the evolution of robotic systems. In this letter, we propose COTORRA, an Edge & Fog driven robotic testbed that combines context information with robot sensor data to validate innovative concepts for robotic systems prior to being applied in a production environment. In lab/university, we established COTORRA as an easy applicable and modular testbed on top of heterogeneous network infrastructure. COTORRA is open for pluggable robotic applications. To verify its feasibility and assess its performance, we ran set of experiments that show how autonomous navigation applications can achieve target latencies bellow 15ms or perform an inter-domain (DLT) federation within 19 seconds.