Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrchestrating Networked Robotic Applications
Oct 25, 2022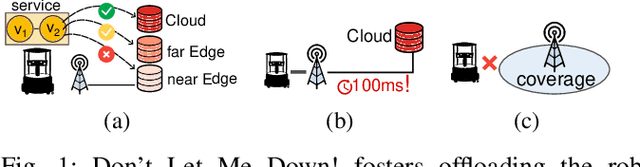
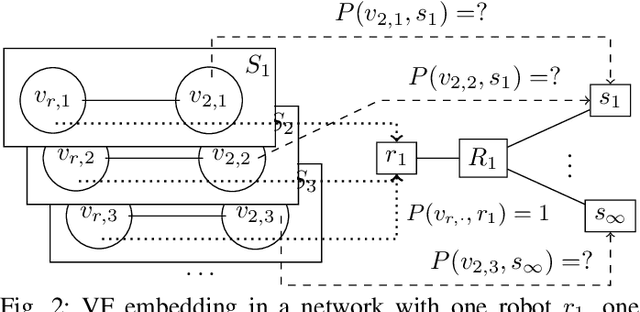
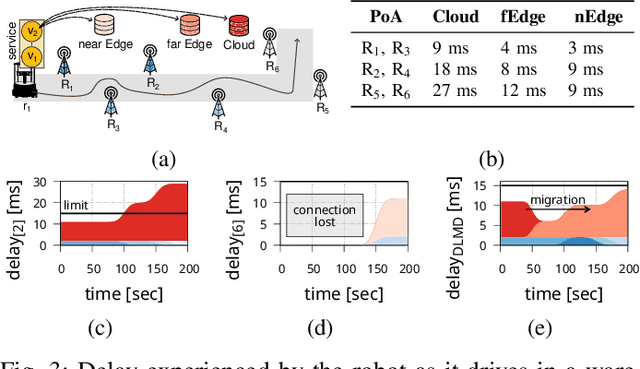
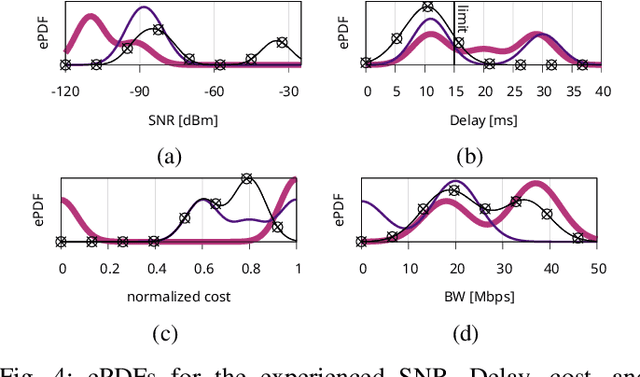
In this letter, we formulate the orchestration problem for networked robotic applications considering contextual information. Any solution to the proposed formulation provides adequate routing updates, migration, and radio handover decisions as the robot moves. We prove the NP-hard nature of the problem, and solve it for a remote driving robotic application with or without some contextual information, as in state-of-the-art. Results show that without contextual information it is impossible to meet the latency requirements of a remote-driving robotic application.
* 4 Pages, 3 figures, submitted to IEEE Communications letter
Via