 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFoReCo: a forecast-based recovery mechanism for real-time remote control of robotic manipulators
May 09, 2022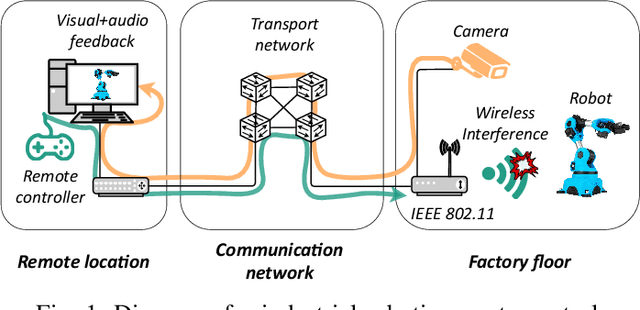
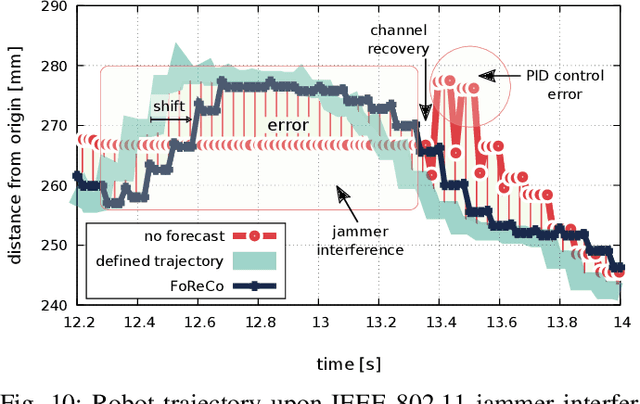
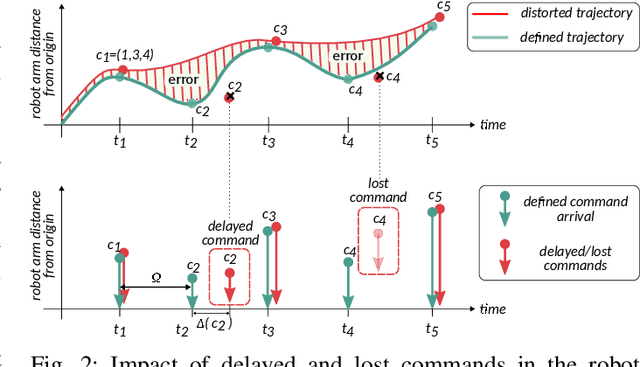
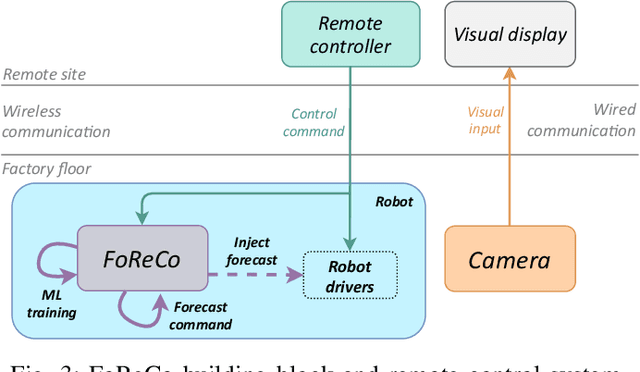
Wireless communications represent a game changer for future manufacturing plants, enabling flexible production chains as machinery and other components are not restricted to a location by the rigid wired connections on the factory floor. However, the presence of electromagnetic interference in the wireless spectrum may result in packet loss and delay, making it a challenging environment to meet the extreme reliability requirements of industrial applications. In such conditions, achieving real-time remote control, either from the Edge or Cloud, becomes complex. In this paper, we investigate a forecast-based recovery mechanism for real-time remote control of robotic manipulators (FoReCo) that uses Machine Learning (ML) to infer lost commands caused by interference in the wireless channel. FoReCo is evaluated through both simulation and experimentation in interference prone IEEE 802.11 wireless links, and using a commercial research robot that performs pick-and-place tasks. Results show that in case of interference, FoReCo trajectory error is decreased by x18 and x2 times in simulation and experimentation, and that FoReCo is sufficiently lightweight to be deployed in the hardware of already used in existing solutions.